Activity
Оригинал статьи в Живом Журнале
В начале 2018 года компания DJI выпустила необычайно привлекательную модель квадрокоптера DJI Mavic Air: очень компактный аппарат с камерой на гиростабилизированном трехосевом подвесе, способной снимать 4K-видео и 12Мп-фото. В последнее время, благодаря Youtube, видео стало очень популярно. И дрон в большой степени заточен именно на видео. По первым впечатлениям кино получается шикарное. Но меня видеосъемка не привлекает, да и навыков соответствующих нет. А вот фото…
Окрестности Кириллова. Кириллов на горизонте слева

Фото мне гораздо интересней. Но чудес, увы, не бывает. Камера Mavic Air имеет матрицу размером 1/2,3 дюйма. Это маленькая матрица, она в 5,3 раза меньше по размеру стандартного пленочного кадра, а по площади - в 28 раз. Поэтому даже при минимальной чувствительности на снимках виден цифровой шум.
DJI Mavic Air. Кто в теме, может заметить, что красная крышка не родная. С самого начала хотел купить красный дрон, чтобы его было проще искать в случае чего. Но красного у продавца не было. Купил черный и заменил крышку на фирменную, но купленную отдельно.

Использование DNG
Первое, что можно сделать для улучшения качества снимков - использовать формат DNG, а не JPG. В DNG сохраняется максимум информации с матрицы, есть возможность коррекции экспозиции, восстановления деталей в светах и тенях. Можно также настраивать баланс белого, не беспокоясь о его настройках при съемке. Но, кстати, цвет, который получается по умолчанию на Mavic Air, и так хорош. По крайней мере в тех условиях, в которых успел поснимать.
Для демонстрации технологии обработки я взял часть (кроп) заглавного кадра размером 900х900. Важно, чтобы при сравнении просмотр происходил без масштабирования, поскольку алгоритмы масштабирования, которые использует браузер (это, к тому же, не самые лучшие алгоритмы), будут искажать картину.
Увы, увы… Здешний движок масштабирует по-своему. Это плохо. Чтобы увидеть неискаженную картину, можно смотреть Оригинал статьи в Живом Журнале. Но на десктопе, потому что мобильные браузеры тоже масштабируют как им в голову взбредет.
Здесь смотреть в масштабе 1:1 можно (и нужно), кликнув по картинке.
Кроп jpg-файла, записанного камерой дрона

Кроп картинки, полученной конвертацией DNG. Конвертация выполнена программой Adobe Camera Raw (ACR) с настройками по умолчанию и при коррекции Auto.

На исходном jpeg шум незаметен. Это результат работы встроенного шумодава. Из-за шумоподавления потеряны детали. Это хорошо видно, например, по листве кустов слева на переднем плане - там просто зеленые пятна. Из-за шумодава картинка становится “пластмассовой”. Кроме того, велик контраст, детали в тенях потеряны. На картинке, полученной из DNG, шум заметен, хотя в ACR по умолчанию тоже включено подавление цветного шума. Зато с детализацией все намного лучше: в первую очередь это видно по листве. И нет пластмассовости. Автокоррекцией в ACR я почти никогда не пользуюсь, поскольку ее результат обычно не устраивает. Но здесь все получилось хорошо. Теневая сторона ёлок теперь не сплошное темное пятно.
Однако хочется большего. Можно настраивать шумодав в ACR. Но этого делать не хочу, не люблю и не буду. Попиксельной резкости нет. Если шарпить, шум еще усилится. Поэтому используем…
Суперразрешение
Технология суперразрешения основана на том, что из нескольких кадров низкого разрешения одной сцены можно сделать кадр высокого разрешения. Исходные кадры должны быть сделаны со сдвигом друг относительно друга. В идеале на полпикселя. Тогда, поскольку пиксель имеет конечный размер, он будет захватывать близкие части сцены. А потом, объединяя такие кадры, можно рассчитывать на восстановление деталей субпиксельного размера.
В Mavic Air есть возможность снимать серией до 7 кадров. Дрон делает эти 7 кадров примерно за 2 секунды (при выдержке 1/1000 в режиме RAW+jpeg). Потом еще некоторое время их обрабатывает и записывает. Камера на стабилизированном подвесе. Последовательные кадры должны, тем не менее, друг от друга немного отличаться. И они отличаются. Вот разница между первым и последним кадрами серии из 7 снимков.

Разумеется, рассчитывать на сдвиг точно в полпикселя не приходится. Но и вероятность сдвига на целое число пикселей тоже мала. Поэтому после выравнивания отдельных кадров можно надеяться на достижение эффекта.
Итак, последовательность действий будет такая:
- Снимаем 7 кадров.
- Увеличиваем все кадры в 2 раза.
- Выравниваем их по содержимому.
- Усредняем выровненные кадры.
- Получается картинка удвоенного разрешения (по количеству мегапикселей - учетверенного)
Увы, снова приходится заметить, что чудес не бывает. Наивно рассчитывать, что путем нехитрых в общем манипуляций мы получим из 12-мегапиксельных фотографий чистую и резкую 48-мегапиксельную картинку с массой новых деталей.
А получим мы вот что. Здесь снова сделан кроп, чтобы смотреть без масштабирования.

Появились ли новые детали? На белом заборе в правой части кадра чуть выше центра теперь отчеливо видны горизонтальные перекладины между столбами забора. Еще у белого домика с зеленой крышей в центре на чердачном окне видны горизонтальные части переплета. Чего-то другого, что не было бы видно на исходных кадрах, найти не могу. Практически исчез шум. В самом деле, шум - штука случайная и в результате усреднения он нивелируется. Но в целом картинка выглядит размытой. Можно попробовать добавить резкости.
Получаем:

Стало резче, но снова усилился шум. И замыленность осталась. А фотошоповская Smart sharpness, которая кривовата, почти съела горизонтальный переплет. Видимо, на учетверение мегапикселей рассчитывать все-таки не следует.
А на удвоение? Уменьшим картинку в корень из двух раз по линейным размерам, что будет соответствовать уменьшению ее площади вдвое. А поскольку перед совмещением и усреднением мы линейные размеры удваивали, то получится в два раза больше пикселей, чем на исходной картинке. При уменьшении также применяется усиление резкости. Разумеется, я делаю ресайз вместе с шарпом с помощью программы C3C Image Size. Она именно для такого и предназначена.
Вот кроп результата. При клике можно увидеть картинку целиком.

Неплохо. Возможно, для печати такой вариант будет подходящим. Шума нет. Но и попиксельной резкости тоже нет. А мы ее любим. Поэтому сделаем решительный шаг и вернем размер картинки к исходному. Конечно, не от предыдущего промежуточного размера, а от максимального, полученного после усреднения. Конечно с помощью программы C3C Image Size с автоматическим усилением резкости. Для этого в C3C Image Size выберем масштаб 50% и Авторезкость.
Получаем чистую и резкую картинку. Вуаля! И горизонтальные перекладины на белом заборе видны!

Actions
Для автоматизации такой обработки изготовлен Action. Даже 3 варианта, объединенные в набор (Set) C3C Actions. Загружать здесь. Кроме перечисленных шагов обработки в конце выполнения каждого Action добавлен вызов программы C3C Color Wizard, которая позволяет сделать финальную доводку полученного кадра. Я в первую очередь использую Автоэкспозицию и Автонасыщенность (волшебная палочка). Можно поправить цветовой баланс, светлоту, резкость…
Три варианта Actions таковы:
- Super Res 1:1 - выполняет описанную здесь обработку, дает картинку исходного разрешения (F10).
- Super Res 1:1 Fast - быстрый вариант (Shift F10). Не выполняет увеличения картинок, выравнивает и усредняет исходный вариант. Соответственно, в конце не происходит уменьшения. Уступает по качеству результата предыдущему, но не сильно.
- Super Res MPх2 - формирует итоговую картинку с вдвое большим чем у исходной числом мегапикселей (Ctrl F10).
Основной вариант Action работает на моем компе 5 минут. Intel Core i5 (4 ядра), 24Гб памяти, твердотельный накопитель, на котором кэш Фотошопа.
Это результат быстрой обработки

Порядок установки и использования Action
Установка:
- Скачайте C3C Actions.
- Кликните по файлу atn или используйте Load Actions… на панели Actions Фотошопа.
- Установите C3C Image Size и C3C Color Wizard.
Использование:
- Выполните предварительную строго одинаковую обработку серии файлов. Предпочтительно использовать DNG, тогда обрабатывать можно в ACR, предварительно выделив все файлы (Select All…). Можно сделать кадрирование, экспокоррекцию и цветокоррекцию, исправление перспективных искажений. Дальше можно открыть все файлы в Фотошопе или, если обработка была в ACR, использовать кнопку Done.
- Запустите Actions. В появившемся диалоге выберите файлы для обработки (Browse…) или используйте Add Open Files, если все файлы (и никакие другие) открыты в Фотошопе. Нажмите OK.
- Ждите. При появлении окна C3C Color Wizard можно выполнить финальную коррекцию или нажать Отмена.
- Наслаждайтесь результатом.
Полный набор материалов, использованных в этой статье (DNG+JPG+ATN, 99МБ)
При подготовке статьи использованы материалы Tony Northrup и Ian Norman
Он начинающего начинающим
Эту заметку начал писать больше года назад, когда все для меня было ново и необычно. Но не дописал. А теперь уже, пожалуй, не допишу, потому что свежесть ощущений ушла. Публикую как есть. Может, кому будет польза.
Здесь я попробую, пока не забыл, перечислить вещи, которые были мне не понятны перед постройкой и в ходе постройки первого квадрокоптра. Люди, имеющие опыт, часто не понимают (не хотят или не могут понять), что человеку, впервые столкнувшемуся с вертолетной тематикой, бывает непонятно абсолютно все. Его шугают, посылают в фак (который обычно никакой, безбожно устарел и мало что объясняет). А дело не в том, что человек не умеет пользоваться поиском. Дело в том, что ему непонятно все. И не ясно, что собственно искать. Это даже не зависит о предмета. То же самое бывает, когда погружаешься впервые в самые разные темы. Я это точно знаю, поскольку много раз осваивал новые для себя вещи. Даже в своей профессии самоучка.
Всегда есть некоторый барьер вхождения. До его преодоления не понятно ничего. А потом происходит “просветление” и все встает на свои места. Надеюсь, что эти заметки помогут кому-то барьер вхождения преодолеть.
Знакомство с мультикоптером
Довольно давно обращал внимание на диковинные аппараты с несколькими пропеллерами. Впечатляли работы команды airpano. И однажды увидел в руках Стаса Седова гексакоптер при съемке Мачу-Пикчу.

Интерес еще возрос, поскольку давно зреет желание сфотографировать с воздуха родные места. Но было совершенно не ясно откуда такие аппараты берутся. Стал в инете смотреть. Вот эта статья удивила тем, что парень там как-то просто взял, чего-то выпилил, трубки приделал, свинтил все это. И оно полетело. Главное, конечно, мне было не понятно откуда он про все это узнал. Ну, рама, трубки - понятно. Но там еще контроллеры какие-то… Это же надо их программировать уметь… Программировать умею, но не микроконтроллеры… В общем, загадка…
Потом на этот форум попал. Через вертолеты. Подробней об этом тут. И в какой-то момент вдруг понял, что все не так страшно. Есть конечно много малопонятных слов: ArduCopter, “кролик” какой-то, “регули”, которые прошивают… Этот самый “кролик” (полетный контроллер Rabbit). Вот он

Кстати, его фотографии позволили понять, что мозги коптера - полетный контроллер - никто сам не паяет и не программирует. Ну, почти никто, подавляющее большинство. И что эти штучки выпускаются вполне серийно. Это как компьютер можно собрать из готовых комплектующих представляя их устройство очень приблизительно. Очень важная аналогия для меня. В электронике не разбираюсь. Но компьютеры себе и родственникам собираю сам. Тоже было страшно поначалу.
Я не понимал, что:
- Мультикоптер можно собрать из готовых комплектующих, не разбираясь в электронике.
Бывают четырехмоторные, шести, восьми-моторные аппараты, даже трехмоторные. Самые популярные - четырехмоторные - квадрокоптеры. Поскольку практически все, о чем пишу, относится к любым таким вариантам, в дальнейшем буду говорить про мультикоптеры.
- Мультикоптер состоит всего из нескольких частей:
-
Рама. Это, наверное, понятно всем. Рамы бывают совсем простые. Буквально из двух деревянных палок. Раму можно сделать самому, а можно купить готовую. Поиск по словам “рама для мультикоптера” или “Multicopter frame”.
-
Пропеллеры - тоже понятно. Пропеллеры покупают готовые. Бывают пластиковые, композитные (тоже пластиковые в сущности, но покруче), карбоновые (легкие, дорогие, жесткие, понтовые), деревянные - не так часто используют, но используют.
-
Моторы. Это уже интересней. Для мультикоптеров используют исключительно бесколлекторные (brushless - бесщеточные) моторы. Это замечательная штука! Маленькие, легкие, мощные. В таких моторах нет трущихся частей. Точнее, нет трения скольжения. Есть только два шарикоподшипника (трение качения) - все! Изнашиваться практически нечему! Довольно удивительно, что у моторов для мультикоптеров вращается наружная часть (по английски это называется outrunner). В ней находятся постоянные магниты. А на внутренней части - обмотки. Такие моторы могут работать только благодаря электронному управлению. За это отвечают
-
Регуляторы. Их, бывает, называют регуляторами напряжения, но это неправильно. И лучше понимать, что это не так. Это электронные регуляторы хода. По английски Electronic Speed Controller, сокращенно ESC. Это такой электронный прибор с микропроцессором внутри, управляющая программа которого может меняться. Процесс называется прошивкой, как выполняется технически до сих пор не понимаю. Без этого понимания можно обходиться, если выбирать регуляторы, в которых не требуется заменять прошивку. Я такие и выбираю. С одной стороны к регулятору тремя проводами подключается мотор (он трехфазный). С другой - два силовых провода от батареи. И еще управляющий провод, обычно трехжильный. По нему от мозгов коптера передаются управляющие сигналы регулятору. Еще, оказывается (я про это поначалу не знал), регулятор может выполнять роль блока питания для управляющей электроники коптера: 5 вольт снимаются с красного проводка (между красным и черным). Почему так, мне и сейчас не очень понятно. Наверное, так надо. Регуляторы переключают большие токи и могут перегреваться, если их нагрузить током большим, чем тот, на который они рассчитаны. Допустимый ток обычно указан на самом регуляторе. Каждому мотору полагается свой регулятор.
Мозги. Если без жаргона - полетный контроллер. По-английски обычно обозначают MC - main controller - главный контроллер. Мозги - это очень важно. Просто очень. Без мозгов такой аппарат не летает. В принципе. Именно благодаря тому, что в ходе прогресса микроэлектроники стало возможно сделать такой легкий управляющий компьютер (контроллер) появился сам класс мультикоптеров. Потому что все управление аппаратом выполняется через этот контроллер, механических устройств управления просто нет (в отличие от вертолета и самолета). Полетный контроллер оснащен разнообразными датчиками. Это: -
Гироскопы. С их помощью контролируются угловые скорости вращения аппарата в пространстве. Например, гироскоп позволяет удерживать заданный курсовой угол, то есть держать нос аппарата
по ветрув нужном направлении. -
Акселерометр. Вообще-то, акселерометр - это прибор для измерения ускорения. Но в последнее время акселеромер рассматривают чаще как прибор, позволяющий определить наклон прибора. Например, в смартфонах. Ошибки в терминах тут нет. Акселерометр измеряет направление ускорения свободного падения (направление силы тяжести) и позволяет держать вертикаль (или горизонталь).
-
Датчик высоты. Это, вроде, понятно. Позволяет удерживать аппарат на заданной высоте. Автоматически. На вертолетах, например, такого обычно нет. И контроль высоты пилотом вертолета с помощью пульта радиоуправления - не такая простая задача. Здесь - все совсем просто. С пульта радиоуправления вы просто задаете, как менять высоту: подниматься, опускаться или удерживать постоянную высоту. Причем, чтобы коптер удерживал постоянную высоту, нужно просто поставить управляющий рычажок (стик) в среднее положение. По крайней мере в случае полетного контроллера Naza дело обстоит именно так. Что для меня остается до сих пор удивительно, так это то, что датчик высоты барометрический - основан на измерении атмосферного давления, которое меняется с высотой. Не укладывыется в голове как это позволяет получить такую высокую точность. Точность удержания аппаратом высоты может составлять плюс-минус полметра.
-
GPS-приемник. Позволяет, принимая спутниковые сигналы, определять координаты аппарата. С точностью плюс-минус метр или два. Это дает возможность удерживать коптер в данной позиции (с указанной точностью) даже на ветру. Очень облегчает управление. То есть, если вы не управляете им вручную (можно руки снять с пульта) аппарат просто (сам!) висит в заданной точке пространства, удерживая высоту, позицию и курсовой угол. Круто!
-
Компас. Магнитный. Прием GPS-сигнала не позволяет, находясь в заданной позиции, определить ориентацию по сторонам света. Для это и нужен компас.
В предыдущей статье про статический потолок получены очень большие значения потолка - существенно больше 10 км для вполне типичных значений запаса тяги. В форуме и комментариях высказывались разумные соображения по поводу того, что достичь такого потолка на практике затруднительно. Причины - от недостатка энергии батареи до опасности обледенения. Согласен. Но, строго говоря, потолок - это высота, на которой аппарат может висеть, а не на которую он может подняться. 😃
Однако, нашлась причина, по которой и висеть на высоте, полученной в упомянутых расчетах, не получается. В приведенных раньше рассуждениях предполагалось, что максимальная мощность электромотора не зависит от атмосферного давления, что безусловно так и есть: электромотор и в вакууме может работать. И предполагалось, что этой максимальной мощностью мы располагаем и у земли и на высоте. Последнее неверно. Бесколлекторный мотор (и коллекторный тоже) не может развить обороты выше оборотов холостого хода, которые при полном “газе” определяются формулой: nmax = Kv*Umax. Если, упрощая, считать, что мотор имеет КПД 100%, то эти обороты не зависят от нагрузки. В действительности это, конечно, не так, но на последующие выводы влияет незначительно.
Итак, будем считать, что при полном газе и меняющемся с высотой атмосферном давлении постоянными являются обороты, которые все время равны nmax. Тяга пропеллера с фиксированной геометрией пропорциональна квадрату оборотов и плотности воздуха. При постоянных оборотах тяга меняется пропорционально плотности. Если запас тяги у земли равен Kt, то он исчезнет (станет равен единице), когда плотность уменьшится в Kt раз. Высота, на которой это произойдет, и будет статическим потолком. Таким образом, в формуле (7) из статьи Статический потолок электрического вертолета: офигеть! вместо показателя степени 3 надо взять 1, а в формуле (10) показатель степени 0,7049 заменить на 0,2350. Тогда при Kt = 2 получается HСТ ≈ 6659м. Знак “≈” использован потому, что предполагалось, что двигатель имеет КПД 100%, что в действительности не так. Можно получить формулу, учитывающую КПД мотора. При случае получу. Но прикидки показывают, что влияние этого фактора малосущественно.

Предыдущая статья - бред? Не вполне. Приведенные там формулы справедливы, если на высоте реализуется полная мощность мотора, что возможно, например, при использовании винтов с изменяемым шагом: на высоте шаг увеличивается.
Ссылки
Комментарии модерируются
Статический потолок - это максимальная высота, на которой вертолет может висеть. Ограничивается потолок тем, что с ростом высоты падает плотность воздуха, а значит и тяга винта. На высоте статического потолка вся мощность мотора, работающего на полном “газе”, расходуется на висение.

Баланс мощности и статический потолок вертолета Ми-26Т
Существует и динамический потолок. Дело в том, что при полете по горизонтали эффективность несущего винта оказывается выше, чем в режиме висения и поэтому, двигаясь по наклонной траектории вверх, вертолет может подняться выше статического потолка. Максимальная высота, на которую может подняться вертолет таким способом, это динамический потолок.
Достичь статического потолка, поднимаясь вертикально, нельзя, поскольку при приближении к такой высоте запас тяги все уменьшается и скорость подъема тоже, поэтому достижение статического потолка возможно лишь асимптотически, то есть за бесконечное время. Но вертолет может попасть на высоту статического потолка подъемом по наклонной траектории.
Это был короткий экскурс в вертолетную терминологию. А теперь вычислим статический потолок электрического вертолета (мультикоптера).
Уравнение вертолета
Равновесие вертолета при висении определяется балансом веса и мощности [3]:

(1)
где
NH - мощность при висении;
G - вес вертолета
η - безразмерный коэффициент полезного действия силовой установки;
Q - безразмерный коэффициент эффективности пропеллера;
D - диаметр пропеллера;
n - количество пропеллеров;
ρ - плотность воздуха.
Запас тяги и запас мощности
При проектировании вертолета мощность моторов берется заведомо больше, чем требуется на висение вблизи земли. Для выбора мощности моторов, можно исходить из запаса тяги (тяговооруженности) - отношения максимальной тяги к весу вертолета. Например, можно спланировать, чтобы максимальная тяга вдвое превышала вес. В этом случае на полной мощности мотор и пропеллер смогут сообщить аппарату такое же ускорение при полете вверх, как и при свободном падении! Это очень круто! Настоящий вертолет такого не может.
Обозначим максимальную тягу Tmax, максимальную мощность Nmax, тяговооруженность KT, а плотность воздуха у земли (на высоте 0м над уровнем моря) ρ0. Тогда:

(2)
и

(3)
Как показывают простые сопоставления, в частности таблицы характеристик моторов, публикуемые производителями моторов, коэффициент запаса тяги (тяговооруженность) соответствует широко применяемому моделистами параметру “процент газа при висении”. То есть KT = 2 соответствует 50% газа, KT = 1 ~ 100% газа, KT = 3 ~ 33% газа и т.д.
Как видно из (3), максимальная мощность пропорциональна KT3/2. То есть коэффициент запаса мощности ** KN = KT3/2**.
Вычисление статического потолка
Чтобы найти плотность воздуха ρ, при которой на висение тратится вся располагаемая мощность (Nmax), приравняем правые части (1) и (3):

(4)
Упростим (4), сокращая одинаковые элементы в правой и левой частях:

(5)
Отсюда находим ρ:

(6)
Поделив обе части (6) на ρ0 и обозначив ρотн = ρ/ρ0, получим:

(7)
Таким образом, при тяговооруженности, например, KT = 2 (50% газа при висении) получается, что плотность воздуха на высоте статического потолка должна быть в 8 раз меньше плотности у земли. Чтобы определить эту высоту обратимся к данным о стандартной атмосфере:


Плотность воздуха в стандартной атмосфере
Статический потолок просто офигительный! Почему?
Как можно видеть, плотность уменьшается в 8 раз, то есть достигает относительного значения 1/23 = 0,125 (красная горизонтальная линия на графике) на высоте больше 16км! Это и будет статический потолок при KT = 2. Неожиданно большое значение! У настоящих вертолетов статический потолок намного меньше.

Статический потолок вертолетов
Объясняется относительно небольшой статический потолок пилотируемых вертолетов двумя обстоятельствами. Во-первых, тяговооруженность 2 - это очень много. Запас мощности при этом составляет 23/2 = 2,83 раза. У реальных вертолетов эта величина существенно меньше. Так, по данным сайта http://www.myhelicopter.ru взлетная мощность вертолета Robinson R44 Raven I составляет 210 л.с., а максимальная - 220 л.с. То есть запас мощности KN = 220/210 = 1.048, а запас тяги KT = KN2/3 = 1,03. При этом статический потолок вертолета равен 4000 футов или 1200м. Более того, как отмечено в [1]: “Вертолеты Ми-2 -6 -8 не имеют статического потолка (статический потолок равен 0. Прим. с3с) - в стандартных атмосферных условиях (H = 0, tн = +15ºC, безветрие) могут висеть с полной полетной массой только в зоне влияния земли.” То есть вертолет может взлететь вертикально благодаря наличию воздушной подушки, но висеть на высоте за пределами влияния подушки уже не может, только лететь с ненулевой горизонтальной скоростью.
Во-вторых, поршневые и газотурбинные двигатели вертолетов теряют мощность с высотой. Так, максимальная мощность турбовального двигателя D-136 вертолета Ми-26 линейно падает с 11400 л.с. на уровне земли до 6000 л.с. на высоте 6500 м. Мощность же электромотора не зависит от плотности воздуха!
Зависимость статического потолка от тяговооруженности
Относительная плотность воздуха в стандартной атмосфере до высоты 11 км (нижняя граница тропопаузы) может быть вычислена по формуле из [2] (H - высота, м):

(8)
Формула дает значения, очень мало отличающиеся от приведенных в таблице стандартной атмосферы и в ГОСТ 4401-81. Отличия возникают по причине того, что не учитывается уменьшение ускорения свободного падения с ростом высоты. Параметры стандартной атмосферы в ГОСТе тоже вычисляются по формулам, но более сложным и для высот от -2000м до 1 200 000м.
Чтобы определить зависимость Hст - статического потолка от тяговооруженности (до высоты 11км) нужно решить уравнение

(9)
относительно неизвестной Hст. Решая, получаем:

(10)

Зависимость статического потолка от тяговооруженности
По табличным данным стандартной атмосферы
Зависимость статического потолка от запаса мощности и процента газа при висении
Запас тяги и запас мощности связаны соотношением KT = KN2/3. Подставляя в формулу (10), получаем:

(11)
Как уже говорилось, процент газа при висении (percent) связан с тяговооруженностью обратной зависимостью KT = 100/percent. Поэтому зависимость статического потолка от процента газа можно получить из формулы (10):

(12)

Зависимость статического потолка от процента газа при висении
График построен с использованием табличных данных стандартной атмосферы и включает высоты до 30км. Как видно, на участке от 50% до 100% газа график представляет собой почти прямую линию. Используя на этом участке линейную аппроксимацию, можно получить более простую формулу:
Hст = 33033 - 331*percent
(13)
Например, при газе 50% получаем 33033 - 331*50 = 16483м.
Оценка запаса мощности по статическому потолку
При анализе характеристик вертолетов не всегда удается найти данные о запасе тяги и мощности. Но, зная статический потолок, эту величину вполне можно оценить. Для этого нужно найти KN из уравнения (11):

(15)
Эта формула не даст точного значения для вертолета с винтом изменяемого шага. В отличие от пропеллеров коптера, коэффициент эффективности вертолетного несущего винта не остается постоянным. Кроме этого, не учитывается падение мощности мотора с высотой. Но для примерной оценки формулу (15) использовать можно.
Выводы
-
Значение статического потолка для характерных значений тяговооруженности электрических вертолетов получается неожиданно большим. Объяснение этому дано выше. Ошибки в расчетах, вроде бы, нет. Формула (7) использует лишь то обстоятельство, что тяга и мощность несущего винта связаны зависимостью со степенью 3/2, а плотность в формулу мощности входит под квадратным корнем в знаменателе.
-
Представляется, что для вертолетов (мультикоптеров), не предназначенных для акробатики, запас тяги 2 (50% газа при висении у земли) завышен. Уменьшение тяговооруженности позволит уменьшить мощность и массу двигателей, нагрузки в конструкции и, как следствие, общую массу ЛА. Что в свою очередь позволит увеличить весовую отдачу (отношение полезной нагрузки к полетной массе) и время полета. Выполненные расчеты подтверждают, что время полета и масса вертолета существенно зависят от запаса тяги.
-
Обнаруживается неожиданная область применения электрических вертолетов - полеты в
ближний космосстратосферу 😃. При 25% газа потолок 30км! Теоретического статического потолка достичь не получится, но интересно было бы попробовать, сколько получится. На форуме, если правильно помню, есть сообщение о полете на высоту 3,5км на Фантоме. Далеко не каждый вертолет может подняться на такую высоту по вертикали. Обратно можно на парашюте или просто падать с выключенными моторами, которые потом включаются у земли - читал, что такое возможно, кто-то так пробовал.
Ссылки
- Л. М. Володко, М. П. Верхозин, В. А. Горшков “Вертолеты”. Под ред. А. М. Володко.— М.: Воениздат, 1992. —557 с: ил.
- Фабрикант Н.Я. Аэродинамика. Общий курс. М.: Наука, 1964. - 815 с.
- Свердлов С. Об эффективности несущего винта.
- ГОСТ 4401-81. Атмосфера стандартная.
- Википедия. Стандартная атмосфера.
- D-136-2. Авиационный турбовальный двигатель. Корпорация “Ивченко”, 2011
- Вертолеты. Характеристики и описание. Robinson R44 Raven I.
- Robinson Helicopter Company. R44 Raven/Clipper Series Helicopters.
- Вертолеты России. Ми-26Т
- Вертолеты России. Ка-52 “Аллигатор”.
Комментарии модерируются
Использование соосного расположения винтов мультикоптера позволяет заметно уменьшить его габарит. При этом, например, соосный октокоптер (самая популярная соосная схема: 8 моторов, 4 луча) сопоставим с несоосным октокоптером (8 моторов, 8 лучей), хотя эффективность нижних винтов несколько снижается. Обнаруживаются, однако, и еще некоторые преимущества соосной схемы, которые для простоты изложения рассмотрим на примере соосного и несоосного октокоптера:
-
4 коротких луча лучше 8 длинных. При одинаковых размерах пропеллеров у соосного октокоптера лучей вдвое меньше и они короче. Кроме уменьшения габаритов аппарата это облегчает его. Изгибающий момент от силы тяги мотора(ов) пропорционален длине луча, поэтому напряжения, возникающие в основании луча, которые определяют его прочность, оказываются меньше, за счет чего луч может быть облегчен.
-
4 нагруженных луча лучше 8 малонагруженных. При заданной длине вес луча определяется площадью его поперечного сечения. С увеличением размеров поперечного сечения его площадь растет пропорционально квадрату размера, а прочность на изгиб - пропорционально кубу. То есть, при увеличении сечения луча в связи с ростом нагрузки на него, вес возрастает меньше, чем прочность. Этот значит, что при одинаковом запасе прочности один луч с вдвое большей нагрузкой на него будет легче, чем два луча даже той же длины с вдвое меньшей нагрузкой.
-
Два мотора на луче разгружают его лучше, чем один. Луч нагружен силой тяги пропеллеров, которая направлена вверх. Но вес моторов, расположенных на концах луча, направлен вниз и разгружает луч (вспомним про топливные баки, которые размещают в крыле самолета для разгрузки крыла). Вес двух моторов (и пропеллеров) способствует разгрузке луча соосного аппарата.
-
Реактивный момент моторов соосного аппарата не нагружает луч. Соосные винты вращаются в противоположные стороны. И если момент, создаваемый соосными моторами, одинаков, то реактивный момент на луч не передается. Как показывают расчеты, реактивный момент, нагружающий луч несоосного аппарата, составляет около 15% изгибающего момента, обусловленного силой тяги. Это значит, что сечение и вес луча по условию прочности в случае соосного аппарата могут быть несколько меньше.
Перечисленные обстоятельства, следующие из анализа нагрузки на луч и прочности луча, позволяют уменьшить вес рамы соосного мультикоптера.
Комментарии модерируются
В заметке про “формулу счастья” был приведен коэффициент 3.8, позволяющий по вертолетному числу H оценить время полета летательного аппарата (ЛА). Этот коэффициент был рассчитан для идеализированной модели вертолета с относительным КПД пропеллеров 50% и КПД электропривода 95%, что является довольно высокими показателями. Более точно этот расчетный коэффициент равен 3.8268. Если вы уверены, что КПД аппарата, который строите, будет сопоставим с приведенными цифрами (например, знаете характеристики аналогов), то такая оценка может быть вполне приемлема. Но это не всегда так. Например, для моделей обычных электрических вертолетов (не мультикоптеров) такая оценка оказывается завышенной.
С другой стороны, если аппарат уже построен и летает, можно оценить его эффективность как отношение фактического времени полета (висения) к вычисленной величине H, которая характеризует потенциал ЛА. Чем больше величина этого отношения, тем выше эффективность.
Итак, формулы такие:
Здесь
H - вертолетное число;
MAH - емкость батареи (батарей) в миллиампер-часах;
S - количество последовательно соединенных банок батареи;
D - диаметр пропеллера в дюймах;
N - число пропеллеров;
P - полетный вес аппарата в граммах;
EH - эффективность вертолета;
T факт - фактическое время полета (висения) в минутах.
В таблице приведены данные для некоторых летательных аппаратов (кликабельно).
Идеальный вертолет - это ЛА с винтами, имеющими относительный КПД 100%, и КПД электропривода также 100%, что, конечно, недостижимо. Значение эффективности реального вертолета всегда будет меньше эффективности идеального, то есть меньше 8,06. В таблице приведена также относительная эффективность в процентах по отношению к эффективности идеального вертолета.
Не следует путать обсуждаемую здесь эффективность EH и эффективность пропеллера (обычно оценивают в граммах на ватт). Это связанные вещи, но не одно и то же. С другой стороны, приведенные в таблице значения относительной эффективности можно назвать относительным КПД вертолета, который представляет собой произведение относительного КПД пропеллера и КПД силовой установки.
P. S. Приведенные в таблице данные по эффективности традиционных вертолетов (не мультикоптеров) объясняют, почему в последнее время для решения прикладных задач (фото и видеосъемка в первую очередь) используют мультикоптеры. Они более эффективны. При том, что обычный вертолет обладает преимуществом по геометрическим характеристикам - при одинаковом габарите площадь, ометаемая несущим винтом одновинтового (тем более винтами двухвинтового соосного) вертолета, больше, чем у мультикоптеров. На низкую эффективность традиционного вертолета, по-видимому, влияет неоптимальная форма несущего винта. У мультикоптеров используются пропеллеры фиксированного шага, аэродинамическое качество которых выше. Наличие трансмиссии (редуктора) тоже не увеличивает КПД вертолета. Вертолетики маленькие, конечно, но и разница в эффективности очень велика.
Комментарии модерируются
В нескольких предыдущих статьях были предложены методики оценки времени полета электрического вертолета. Использование этих методик предполагает выполнение вычислений по формулам, использование графиков и таблиц. При этом обычно требуется предварительно перевести величины, используемые в формулах, в систему единиц СИ, а затем - обратно в привычные единицы. Значения по графикам берутся на глазок… В какой-то момент поймал себя на том, что самому эти методики не очень уж удобны - постоянный перевод из дюймов в метры, из секунд в минуты напрягает.
Некоторые величины, которые нужны для вычисления времени полета, не всегда точно известны: коэффициенты аэродинамического качества пропеллеров, КПД мотора и батареи, плотность воздуха.
Между тем, ключевых параметров, влияющих на продолжительность полета, которыми конструктор может оперировать при проектировании аппарата, не так много. Это размер и количество пропеллеров, ёмкость и напряжение батареи, вес аппарата. Известно, каким образом эти величины влияют на время полета. Так почему бы для сравнительной оценки качества конфигурации не использовать простую формулу, в которой отсутствуют любые константы, в которой нет коэффициентов с не вполне определенными значениями. Имеет смысл использовать размерности, которые чаще применяются на практике: диаметр пропеллеров в дюймах, емкость аккумулятора в миллиампер-часах…
Вот эта формула:
Здесь
H - величина вертолетного счастья (Helicopter Happiness) 😃. В попугаях. 😃 Чем больше, тем дольше будет летать вертолет.
MAH - емкость батареи (батарей) в миллиампер-часах;
S - количество последовательно соединенных банок батареи;
D - диаметр пропеллера в дюймах;
N - число пропеллеров;
P - полетный вес аппарата в граммах.
Можно при желании подставлять в правую часть формулы значения и в других единицах. Например, в ампер-часах или килограммах. Если вы делаете расчеты для себя - нет проблем. Но рассчитанные по-разному значения H нельзя сравнивать напрямую.
В таблице приведены результаты расчетов для нескольких вертолетов. Два первых - это варианты моего квадролёта, другие в представлении не нуждаются.
Опыты и расчеты показывают, что по величине H можно оценить и время полета в минутах. Примерно так: T = 3.8 H. Если реальное время полета вашего аппарата немного меньше - это нормально, коэффициент 3.8 соответствует вертолету с высоким КПД моторов и хорошими пропеллерами. Если меньше намного - повод задуматься о качестве пропеллеров, батарей и моторов. В этом смысле неважный показатель у Фантома-2. При том, что значение H у Фантома наибольшее - легкий аппарат с хорошей батареей - летает он 25 минут, а мог бы минут 30-35. Коэффициент 3.8 применим не всегда. Например, для классических вертолетов он дает время, существенно отличающееся от реального.
Про счастье - немного шутка. 😃 Можно называть “число Н” или “вертолетное число”. Оно позволяет оценить потенциал конфигурации, а фактическое время полета будет зависеть от качества компонент и их согласованности. Чем использование такого критерия лучше калькулятора? Тем, в частности, что можно сделать прикидки, не зная характеристик конкретного мотора. Во-вторых, можно оценить, как реализован потенциал уже летающего аппарата (см. пример Фантома).
Ссылки
- Об эффективности воздушного винта
- Проектирование мультикоптера
- Продолжительность полета электрического беспилотного вертолета
- Аэродинамическое качество пропеллеров APC
- Эффективность идеального пропеллера
- Сравнительная оценка эффективности пропеллера
- Максимальная продолжительность полета и коэффициент совершенства электрического вертолета
Комментарии модерируются
В статье “Еще один критерий выбора массы аккумулятора для электрического вертолета” был предложен интегральный критерий, в соответствии с которым рекомендуется брать относительную массу АКБ равной
m = 3/2^(2/3) - 1 ≈ 0.89
(1)
То есть масса АКБ должна составлять около 89% массы ЛА без батареи. Тогда продолжительность полета тоже будет составлять те же 89% максимально возможной, которая достигается при m = 2.
Нетрудно показать, что для двух вертолетов с разной относительной массой батареи отношение мощностей, необходимых для поддержания ЛА в воздухе при прочих равных будет равно
N1/N2 = ((1+m1)/(1+m2))^(3/2)
(2)
Подставляя сюда m1= 2, а m2= 3/2^(2/3) - 1, получим
N1/N2 = ((1+2)/(3/2^(2/3)))^(3/2) = (2^(2/3))^(3/2) = 2
(3)
То есть при использовании аккумулятора оптимальной (в соответствии с (1)) массы мощность, необходимая для поддержания аппарата в воздухе, уменьшается ровно вдвое по сравнению с мощностью, которая потребовалась бы для аппарата с максимальной продолжительностью полета.
Это ничего не доказывает, но придает эстетическое совершенство интегральному критерию.
Комментарии модерируются
Эта статья продолжает серию предыдущих работ, в которых рассматривались вопросы, связанные с оценкой времени полета электрического вертолета (мультикоптера):
Об эффективности воздушного винта
Проектирование мультикоптера
Продолжительность полета электрического беспилотного вертолета
Аэродинамическое качество пропеллеров APC
Эффективность идеального пропеллера
Сравнительная оценка эффективности пропеллера
Ниже дается простая методика, позволяющая оценить потенциал проектируемого мультикоптера, узнать теоретический предел продолжительности полета. Все данные относятся к режиму висения. Обоснование методики можно найти в упомянутых выше статьях.
На рис. 1 приводятся графики, позволяющие определить максимально возможную продолжительность полета в зависимости от нагрузки на диск, то есть отношения веса летательного аппарата (без аккумулятора) к площади, ометаемой винтами.
Расчеты выполнены для аккумуляторов, имеющих плотность энергии 500КДж/кг. Это примерно соответствует плотности энергии литий-полимерных аккумуляторов, используемых при постройке электрических вертолетов и мультикоптеров. Так, среднее значение плотности энергии 20 аккумуляторов из ассортимента сайта hobbyking.com составило 486КДж/кг. Значение 500КДж/кг выбрано для удобства - чтобы при использовании аккумуляторов другого класса было проще определить поправочный коэффициент.
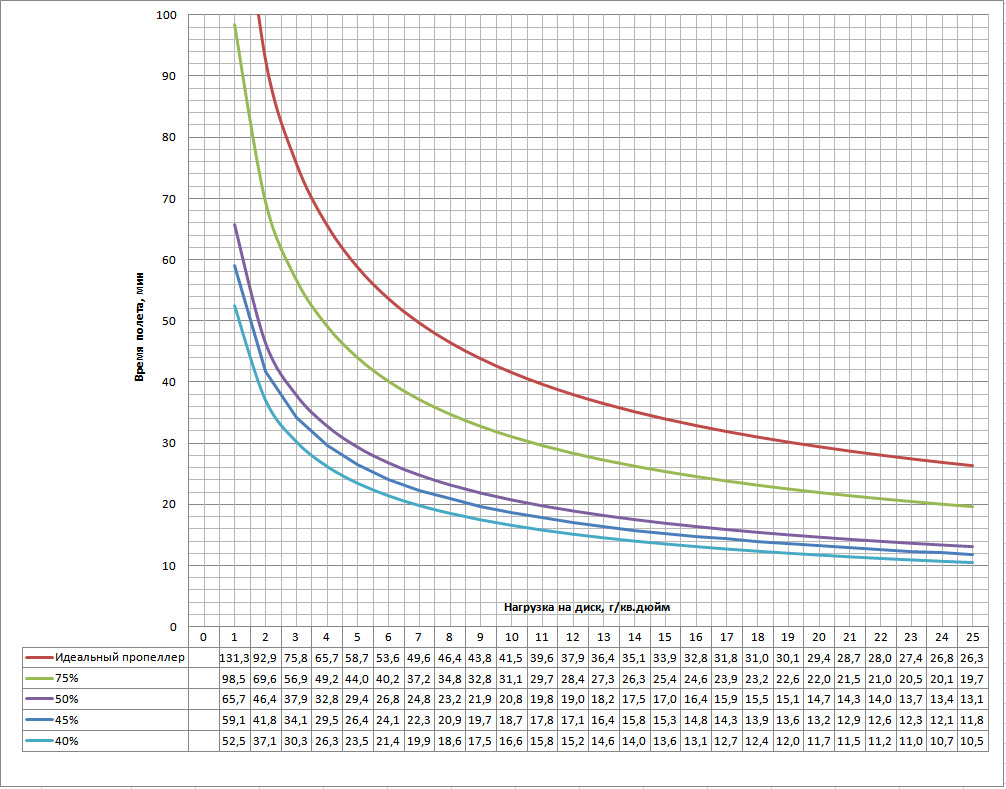
Рисунок 1. Максимальная продолжительность полета
Кликабельно
Нагрузку на диск для использования на графике нужно рассчитывать
по массе летательного аппарата без аккумулятора
Кривая темно-красного цвета позволяет определить максимальную продолжительность полета идеального вертолета. То есть оснащенного идеальными пропеллерами и идеальным электроприводом (аккумулятор-регулятор-мотор-провода) с КПД 100%. Такая продолжительность - это теоретический предел и в действительности не может быть достигнута.
Реальные пропеллеры имеют эффективность меньше идеального. Максимальное известное мне из литературы значение коэффициента совершенства пропеллера составляет 0,75, то есть 75%. Этот коэффициент, который равен отношению эффективности реального и идеального пропеллера при работе на месте, называют также относительным КПД.
Относительный КПД популярных пропеллеров APC серий SF и MR диаметром от 8 до 18 дюймов составляет 44-49%. На графике приведены кривые, соответствующие относительному КПД 40%, 45% и 50%, что примерно соответствует этому диапазону. Для предварительных оценок можно использовать график для 45%.
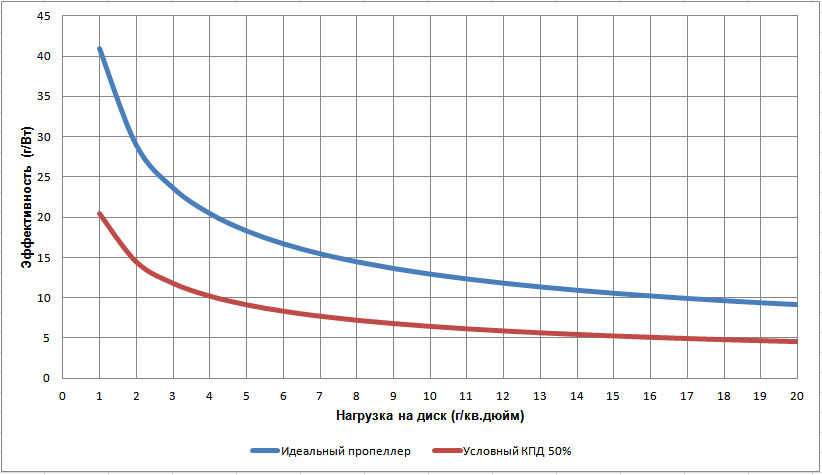
В таблице 1 приводятся значения ометаемой площади (в кв.дюймах) для пропеллеров разного диаметра и аппаратов разного типа.
Таблица 1. Площадь, ометаемая несущими винтами
Поправочные коэффициенты
Чтобы оценить продолжительность полета реального аппарата, можно использовать поправочные коэффициенты, на которые надо умножить найденное по графику время полета.
Коэффициент относительной массы АКБ (Km)
Кривые на графике соответствуют максимально возможной продолжительности полета, которая, как показано в статье Продолжительность полета электрического беспилотного вертолета, достигается, когда масса аккумуляторной батареи вдвое превышает массу ЛА без батареи, то есть при значении относительной массы АКБ m = M/M0 = 2. Здесь M - масса АКБ; M0 - масса ЛA без аккумуляторов. В таблице 2 приведены значения Km для разных значений относительной массы АКБ (m)
Таблица 2. Поправочный коэффициент
относительной массы батареи
КПД электропривода
КПД бесколлекторного мотора довольно высок и обычно оценивается в 80-90%. Соответственно, коэффициент, учитывающий неидеальность энергоустановки можно выбрать в пределах 0,8-0,9.
Поправочный коэффициент плотности энергии батареи
Как уже сказано выше, расчеты для построения графика выполнены для плотности энергии 500КДж/кг. Если используемые батареи обладают существенно отличающейся плотностью энергии, можно использовать поправочный коэффициент Kw = w/500, где w - плотность энергии имеющейся батареи в КДж/кг.
Как рассчитать плотность энергии. Если обозначить емкость батареи в миллиампер-часах MAH, массу батареи в граммах - M, а количество последовательно соединенных банок батареи - S, то плотность энергии в килоджоулях на килограмм или, что то же самое, в Дж/г, можно рассчитать так:
w = 13,3*S*MAH/M
Пример
Для примера выполним расчет для квадрокоптера, описанного в статье “Квадролёт. Продолжение”
Полетная масса: 2700г
Масса аккумулятора: 526г
Емкость аккумулятора (4S): 5200мАч
Четыре пропеллера APC 12x45MR
Вес без аккумулятора: 2700 - 526 = 2174г.
Ометаемая площадь (по таблице 1): 452 кв. дюйма.
Нагрузка на диск: 2174/452 = 4,81г/кв.дюйм
Максимальная продолжительность по графику для идеального пропеллера: 60 минут. Эх… Жаль, что это недостижимо… 😦
При относительном КПД 45%: 60*0,45 = 27 минут.
Масса аккумулятора моего аппарата, мягко сказать, несколько меньше рекомендованной. Относительная масса равна m = 526/2174 = 0,24. По таблице 2 поправочный коэффициент возьмем 0,45. Тогда время полета 27*0,45 = 12,15 минуты.
Фактически столько и летает! 11-12 минут.
Уточним коэффициент плотности энергии. Плотность энергии w = 13,3*4*5200/526 = 527КДж/кг. Батарея Revolectrix имеет плотность энергии несколько выше средней. Kw = 527/500 = 1.05. Полученное расчетное время 12,15 минут надо умножить на 1,05. Получится 12,8 минуты. Сопоставление с фактическим временем говорит о том, что КПД привода весьма высок и его можно оценить отношением 12/12,8 = 0,94 = 94%.
Коэффициент совершенства вертолета
Чтобы охарактеризовать различие между реальным и идеальным вертолетом, можно определить коэффициент совершенства вертолета как отношение реального времени его полета (висения) к теоретическому максимуму, то есть к времени полета идеального вертолета (верхняя кривая на графике) с учетом коэффициента Kw. Для рассмотренного примера (возьмем время полета 12 минут) получается C = 12/(60*1.05) = 0.19 = 19%.
Комментарии модерируются
В сети имеется множество таблиц с тестами пропеллеров и винто-моторных групп (ВМГ). Многие делают собственные тесты. Иногда возникают проблемы в сопоставлении этих данных друг с другом и абсолютной оценке эффективности пропеллера и ВМГ. Дело в том, что сравнивать эффективность можно только при одинаковой тяге или одинаковой мощности. А значения тяги и мощности в таблицах результатов разных измерений чаще всего не совпадают. Поэтому сравнение происходит на глазок. К тому же, может оказаться неясно, каков же абсолютный уровень аэродинамического качества.
Ниже предлагается простой способ, позволяющий оценить качество пропеллера. Теоретические основы такого метода изложены в статье Эффективность идеального пропеллера.
1. По величине силы тяги F [г], полученной при испытаниях, и диаметру винта считаем нагрузку на диск: p = F/S [г/кв.дюйм], где S [кв.дюйм] - площадь, ометаемая винтом при вращении (площадь диска). Значения площади можно взять из Таблицы 1. Значение тяги можно брать из любого опыта. Часто в таблицах характеристик приводят тягу и мощность в зависимости от процента газа. Можно взять величину тяги при 50% газа или, например, 75%. Значения эффективности [г/Вт] берем из результатов того же опыта.
Таблица 1. Площадь диска пропеллера
2. По графику на рис. 1 определяем, в какую зону попадает исследуемый пропеллер (ВМГ).
Рис. 1. Зависимость эффективности от нагрузки на диск
Эффективность равная эффективности идеального пропеллера (кривая черного цвета) недостижима, но очень хорошие винты могут к ней приближаться (светло-серая зона).
По сведениям из литературы по теории вертолета известно, что хорошо спроектированные винты полноразмерных летательных аппаратов могут иметь эффективность, соответствующую темно-зеленой зоне (относительный КПД 65-75%).
Граница светло-зеленой и желтой зоны - относительный КПД = 50% - хороший показатель.
Желтая зона - эффективность популярных пропеллеров APC серий MR и SF (относительный КПД 44-49%)
Оранжевая зона - эффективность ниже всех названных вариантов.
Значения мощности в большинстве опытов, результаты которых публикуются в сети разработчиками, продавцами комплектующих и энтузиастами, относятся к характеристикам ВМГ - паре мотор+пропеллер, а точнее - регулятор-мотор-пропеллер. Это обусловлено тем, что для измерения механической мощности пропеллера требуется более сложный испытательный стенд. Поэтому, если для оценки используются данные таких испытаний, следует учесть КПД мотора, который обычно составляет 80-90%. Соответсвенно, для использования на графике нужно умножить эффективность, полученную по результатам опытов, на поправочный коэффициент 1.1-1.25.
Комментарии модерируются
Одна из составляющих шума, создаваемого пропеллером, обусловлена тем, что каждая лопасть пропеллера, проходя через данную точку пространства, создает область повышенного давления в этой точке, которая распространяясь, порождает звуковую волну. Это так называемый шум вращения. Частота такой составляющей шума равна
f = k*omega/(2*Pi),
(1)
где k - количество лопастей пропеллера; omеga - угловая скорость вращения пропеллера (рад/с). В свою очередь угловая скорость может быть определена из условия равновесия мультикоптера при висении. Формула для тяги F, создаваемой несущим винтом:
F = alpha*ro*omega^2*D^4,
(2)
где
alpha - коэффициент тяги;
ro - плотность воздуха;
D - диаметр винта.
Отсюда:
omega = sqrt(F/(alpha*ro))/D^2
(3)
Подставляя omega из (3) в (1), получим:
f = k*sqrt(F/(alpha*ro))/(2*Pi*D^2)
(4)
Для квадрокоптера, описанного в статье “Квадролет. Продолжение”, имеем: вес 2700г (26,5Н), 4 двухлопастных (k=2) пропеллера APC 12x45MR, диаметр пропеллера 12 дюймов = 0,3048м, коэффициент тяги alpha = 0,00196, тяга одного пропеллера F = 26,5Н/4 = 6,62Н.
Частота:
f = 2*sqrt(6,62/(0,00196*1,225))/(2*3,14*0,3048^2) = 179,9Гц
Частота вращения пропеллера в 2 раза (k раз) меньше и равна 90,0Гц или 5400об/мин.
Проверить ощущения можно, используя звуковой генератор. Мои ощущения вполне совпадают. Лучше всего при треугольной форме сигнала.
Значения коэффициента тяги для популярных пропеллеров APC можно найти в статье Аэродинамическое качество пропеллеров APC.
В общем случае частота вращения пропеллера (об/мин):
n = 30*sqrt(F/(alpha*ro))/(Pi*D^2)
(5)
Определение коэффициента тяги пропеллера по звуку
Приведенные здесь зависимости можно использовать для определения коэффициента тяги пропеллера. Выразив из (4) коэффициент alpha, получаем:
alpha = k^2*F/(4*Pi^2*D^4*ro*f^2)
(6)
Чтобы определить частоту f, можно записать шум, издаваемый пропеллерами вертолета и воспользоваться каким-нибудь анализатором звуковых сигналов, выделив основную частоту. Сам еще не пробовал… Гы…
Замечу, что в этом подходе нет ничего приблизительного, кроме самой возможности определить по записи шума частоту вращения пропеллеров. Если частота вращения определяется, то формула для alpha будет точна по определению.
Комментарии модерируются
В статье Об эффективности несущего винта была приведена формула эффективности (измеряется в г/Вт, Н/Вт) пропеллера в режиме висения:
E = Q*D*sqrt(ro/F)
(1)
где
Q - коэффициент эффективности (качества) пропеллера, характеризующий его аэродинамическое совершенство;
D - диаметр пропеллера;
ro - плотность воздуха;
F - нагрузка (тяга пропеллера).
Значения коэффициента эффективности Q для распространенных пропеллеров APC серий SF и MR вычислены по данным компании-производителя в заметке Аэродинамическое качество пропеллеров APC.
Интересен вопрос, насколько аэродинамическое качество реальных пропеллеров близко к идеалу. Каково максимально возможное значение коэффициента эффективности и какова максимально возможная эффективность пропеллера.
Ниже получены ответы на эти вопросы. Если вы не хотите вдаваться в детали и вникать в промежуточные выкладки, можно сразу перейти в раздел Результаты.
Импульсная теория идеального пропеллера
Эта теория была создана во второй половине XIX века вначале для судовых гребных винтов, а затем была распространена на воздушные винты. Воздух рассматривается как идеальная, то есть несжимаемая жидкость без вязкости. Такое допущение хорошо соблюдается для дозвуковых скоростей. Для справки: скорость на конце лопасти 18-дюймового пропеллера при 11 тыс. об/мин составляет 263 м/с. Скорость звука в стандартной атмосфере на уровне моря 340м/с.
Детальная картина обтекания лопастей пропеллера в рамках этой теории не рассматривается, а применяются общие законы механики: закон изменения количества движения (импульса), законы сохранения энергии и массы для потока воздуха, проходящего через пропеллер.
Пропеллер разгоняет поток (струю) проходящего через него воздуха. Скорость в струе меняется от V0 = 0 на достаточном удалении перед пропеллером до максимального значения V2 - на достаточном удалении после пропеллера.
По теореме Эйлера об изменении количества движения (импульса) в потоке жидкости:
F = m’*(V2 - V0) = m’*V2
(2)
где
m’ - секундный массовый расход воздуха в струе.
Обозначим V1 - скорость воздуха, проходящего через диск пропеллера. Предположим, что эта скорость постоянна по площади диска. Можно показать [1], что именно в этом случае достигается максимально возможная эффективность пропеллера. Сила тяги F приложена к пропеллеру, а равная по величине, но противоположная по направлению сила по третьему закону Ньютона приложена к потоку воздуха, который движется через плоскость диска под действием этой силы со скоростью V1. Тогда мощность N передаваемая пропеллером потоку равна
N = F*V1
(3)
Поскольку потери не учитываются, а поток стационарный, величина кинетической энергии воздуха, проходящего через каждое сечение струи в единицу времени остается постоянной вдоль струи. Тогда на достаточном удалении за пропеллером, где скорость достигает своего максимального значения V2, кинетическая энергия воздуха, проходящего через сечение струи в единицу времени равна
N = m’*V2^2/2
(4)
Приравнивая правые части (3) и (4), получаем:
F*V1 = m’*V2^2/2
(5)
Подставляя в (5) выражение для F из (2), получим:
m’*V2*V1 = m’*V2^2/2
(6)
Поделив обе части (6) на m’*V2 получаем:
V1 = V2/2
(7)
Скорость V1, с которой воздух проходит через диск пропеллера, называется скоростью подсасывания, а максимальная скорость струи на удалении за пропеллером V2 - скоростью отбрасывания. Из (7) следует, что скорость отбрасывания вдвое превышает скорость подсасывания. Это один из важных результатов импульсной теории идеального пропеллера, который хорошо подтверждается экспериментально.
Массовый (секундный) расход воздуха в струе пропеллера может быть определен через плотность воздуха ro, площадь диска пропеллера S и скорость потока в плоскости диска:
m’ = ro*S*V1
(8)
Эффективность идеального пропеллера
Вычислим эффективность пропеллера E как отношение тяги к мощности, используя для мощности формулу (3).
E = F/N = F/(F*V1) = 1/V1
(9)
Оказывается, что эффективность пропеллера обратно пропорциональна скорости струи воздуха, проходящей через пропеллер. Это весьма наглядный результат. Скорость потока увеличивается при увеличении скорости вращения пропеллера. Эффективность при этом убывает. Скорость вращения приходится увеличивать, если возрастает нагрузка на пропеллер или при той же нагрузке уменьшается размер пропеллера. Такие же выводы следуют и из формулы (1). Определим зависимость V1 от тяги F. Учитывая, что в соответствии с (7) V2 = 2*V1, из (2) получаем формулу для тяги, выраженной через скорость V1:
F = m’*V2 = 2*m’*V1
(10)
Подставим в (10) значение массового расхода из (8):
F = 2*m’*V1 = 2*ro*S*V1*V1 = 2*ro*S*V1^2
(11)
Отсюда:
V1 = sqrt(F/(2*ro*S))
(12)
Площадь диска пропеллера равна
S = Pi*D^2/4
(13)
Подставляя в (12), получаем:
V1 = sqrt(F/(2*ro*Pi*D^2/4)) = sqrt(2*F/(Pi*ro*D^2))
(14)
Соответственно, эффективность:
E = 1 /V1 = D*sqrt(Pi*ro/(2*F))
(15)
Группируя константы, перепишем формулу (15):
E = sqrt(Pi/2)*D*sqrt(ro/F)
(16)
Сравнивая формулу (16) с формулой (1), приходим к выводу, что коэффициент эффективности идеального пропеллера равен
Qид = sqrt(Pi/2) = 1,253
(17)
С некоторой грустью приходится заметить, что коэффициенты эффективности реальных пропеллеров, приведенные в [4], более чем вдвое меньше Qид (то есть максимально возможного) и составляют для пропеллеров APC серий MR и SF от 0,545 до 0,609. Мне это тем более обидно, что из-за ошибки в расчетах Qид вначале получился вдвое меньше, его значение при этом превышало значения коэффициента эффективности всех участвовавших в расчетах реальных пропеллеров, но превышало очень ненамного. Что означало, что эффективность пропеллеров APC близка к идеалу. Увы…
Коэффициент совершенства пропеллера в режиме висения
Отношение коэффициента эффективности реального пропеллера к коэффициенту эффективности идеального характеризует аэродинамическое совершенство пропеллера. Такое отношение называют [1] коэффициентом совершенства. Обозначим коэффициент совершенства c - от (aerodynamic c leanness - аэродинамическое совершенство). Тогда
с = Q/Qид = sqrt(2/Pi)*Q = 0,798*Q
(18)
Для идеального пропеллера с = 1, для реальных с < 1. Для пропеллеров APC, рассматривавшихся в [4], 0,435 <= с <= 0,486, то есть от примерно 44% до 49%. Между тем, в литературе [2] можно встретить утверждения, что для хорошо спроектированных винтов этот коэффициент достигает 0,65-0,75. Эти цифры, по всей видимости, относятся к винтам полноразмерных летательных аппаратов, но наверное есть потенциал и для совершенствования небольших пропеллеров, используемых в мультикоптерах.
Условный КПД пропеллера в режиме висения
Рассмотрим отношение мощности идеального к мощности реального пропеллера одного и того же диаметра при одинаковой тяге в режиме висения. Поскольку эффективность E - это отношение тяги к мощности, то
N = F/E
(19)
Мы рассматриваем отношение мощностей при одинаковой тяге, поэтому оно будет равно обратному отношению эффективностей, то есть отношению эффективности реального пропеллера к эффективности идеального. Отношение этих эффективностей, как следует из рассмотрения формул (1) и (16), равно отношению коэффициентов эффективности, то есть выражается формулой (18). Таким образом, коэффициент совершенства пропеллера (18) выражает отношение мощности реального пропеллера к мощности идеального, который работает без потерь и расходует всю свою мощность на создание силы тяги. Такое отношение похоже на выражение для КПД. В отечественной литературе [2] его и называют относительным КПД пропеллера, работающего на месте:
eta0 = с = sqrt(2/Pi)*Q
(20)
Надо, однако, заметить, что это условное название, поскольку работая на месте, пропеллер не создает полезной работы и его КПД в обычном понимании равен нулю.
Максимальная эффективность пропеллера
В практике проектирования и постройки мультикоптеров часто оперируют показателем эффективности в г/Вт. Интересно и полезно оценить максимально возможную эффективность, которую дает идеальный пропеллер. По формуле (16):
Eид = Emax = sqrt(Pi/2)*D*sqrt(ro/F)
(21)
В правую часть формулы входят диаметр винта и величина тяги. Максимальная (как и реальная) эффективность пропорциональна диаметру винта и обратно пропорциональна квадратному корню из величины тяги. Чтобы представить эту зависимость как функцию одной переменной, используем в формуле (21) величину удельной нагрузки на диск (на ометаемую пропеллером площадь) p.
p = F/S = F/(Pi*D^2/4)
(22)
Отсюда
D/sqrt(F) = 2/(sqrt(Pi*p)
(23)
Подставляя правую часть (23) в (21) и выполняя элементарные преобразования, получим:
Emax = sqrt(Pi/2)*2/(sqrt(Pi*p)*sqrt(ro) = 2*sqrt(Pi/2)*(sqrt(ro/(Pi*p)) = sqrt(2*ro/p)
(24)
Emax = sqrt(2*ro/p)
(25)
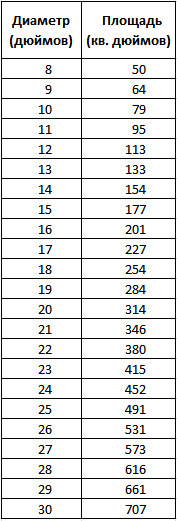
На рис. 1 показан график зависимости (25). Использованы размерности величин в системе СИ (не путать с языком Цэ 😃 ). Плотность воздуха для стандартной атмосферы на уровне моря ro = 1,225 кг/куб.м.
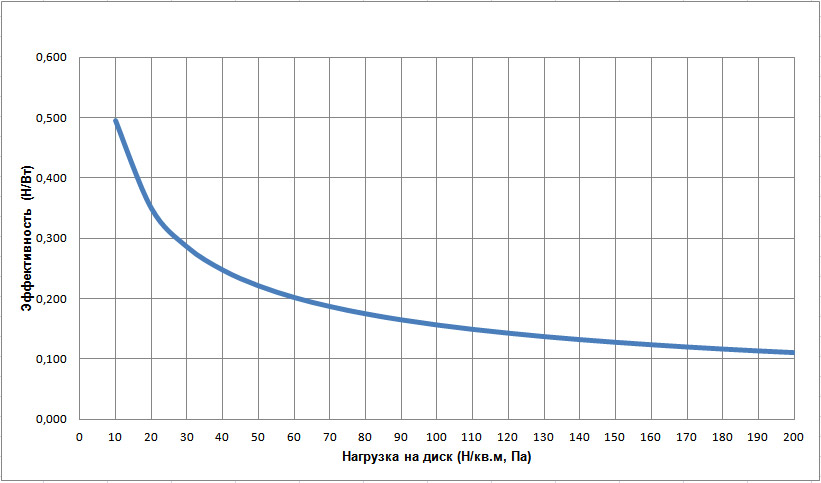
Рис. 1. Зависимость эффективности идеального пропеллера от нагрузки на диск
Результаты
- V1 = sqrt(p/(2*ro)) = sqrt(2*F/(Pi*ro))/D = 1/Emax
- V2 = 2*V2
- Emax = 1/V1 = sqrt(Pi/2)*D*sqrt(ro/F) = Qид*D*sqrt(ro/F) = sqrt(2*ro/p)
- Qид = sqrt(Pi/2) = 1,253
- с = eta0 = E/Emax = Q/Qид = 0,798*Q
Обозначения:
E - эффективность пропеллера (г/Вт, Н/кв.м.)
Emax - максимально возможная эффективность - эффективность идеального пропеллера.
Q - коэффициент эффективности (качества) пропеллера, характеризующий его аэродинамическое совершенство;
Qид - коэффициент эффективности идеального пропеллера.
D - диаметр пропеллера;
ro - плотность воздуха; Равна 1,225кг/куб.м
F - нагрузка (сила тяги пропеллера).
с - коэффициент совершенства пропеллера.
eta0 = с - относительный КПД пропеллера, работающего на месте.
V1 - скорость потока воздуха в плоскости пропеллера (скорость подсасывания).
V2 - скорость потока воздуха на удалении за пропеллером (скорость отбрасывания).
Pi = 3,14159.
S - площадь, ометаемая пропеллером (площадь диска). S = Pi*D^2/4
p = F/S - (удельная) нагрузка на диск.
Зависимость эффективности от нагрузки на диск
Зависимость площади диска
от диаметра пропеллера
Пример
Выполним для примера расчет для одной из конфигураций квадрокоптера, приведенной в [5]:
вес 1366г, 4 пропеллера APC 12x45MR, эффективность ВМГ по результатам тестового полета E = 10г/Вт.
В системе СИ: вес 13,4Н, тяга одного пропеллера F = 13,4/4 = 3,35Н, диаметр пропеллера 12*0,0254 = 0,3048м.
Площадь диска S = Pi*D^2/4 = 3,14*0,3048^2/4 = 0,0730 кв.м. По таблице: S = 113 кв.дюймов.
Нагрузка на диск p = F/S = 3,35/0,0730 = 45,9Н/кв.м или 1366/4/113 = 3,02г/кв.дюйм.
Скорость подсасывания V1 = sqrt(2*F/(Pi*ro))/D = sqrt(2*3,35/(3,14*1,225))/0,3048 = 4,33м/с.
Скорость отбрасывания V2 = 2*V1 = 2*4,33 = 8,66м/с.
Максимальная эффективность Emax = 1/V1 = 1/4,33 = 0,231Н/Вт или при нагрузке на диск 3,02г/кв.дюйм по графику примерно 23г/Вт.
Коэффициент совершенства, он же относительный КПД с = E/Emax = 10/23 = 0,43 = 43%.
Список источников
- Джонсон У. Теория вертолета: В 2-х книгах. Пер. с англ.— М. Мир, 1983.
- Обуховский А. Д. Аэродинамика воздушного винта. Новосибирск: Изд-во НГТУ, 2009.
- С. Свердлов Об эффективности несущего винта.
- С. Свердлов Аэродинамическое качество пропеллеров APC
- С. Свердлов Квадролёт
Комментарии модерируются. Заявления о том, что КПД висящего вертолета отличен от нуля, не принимаются.
В статьях “Об эффективности несущего винта” и “Продолжительность полета электрического беспилотного вертолета” приведены формулы, позволяющие вычислить тягу, создаваемую пропеллером, мощность, затрачиваемую на вращение пропеллера, эффективность пропеллера и время полета вертолета в режиме висения.
Сила тяги, создаваемая пропеллером (F), и мощность, необходимая для вращения пропеллера (N), выражаются такими формулами:
F = alpha*ro*n^2*D^4
N = beta*ro*n^3*D^5
Здесь:
alpha и beta - безразмерные коэффициенты тяги и мощности.
ro - плотность воздуха;
n - частота вращения винта;
D - диаметр винта;
Коэффициент
Q = alpha^(3/2)/beta
характеризует аэродинамическое качество пропеллера.
Эффективность пропеллера:
E = Q*D*sqrt(ro/F)
Время полета в режиме висения (с):
где
w - удельная энергоемкость аккумулятора (Дж/кг);
eta - безразмерный коэффициент полезного действия силовой установки;
Q - безразмерный коэффициент аэродинамического качества пропеллера;
ro - плотность воздуха (кг/куб.м). Для стандартной атмосферы по ГОСТ 4401-81 составляет 1.225кг/куб.м;
Pi = 3.14159;
g - ускорение свободного падения (м/с^2);
p0 - удельная нагрузка на пропеллеры, рассчитанная по весу ЛА без АКБ (Н/кв.м);
m - относительная масса АКБ. m = M/M0, где M - масса аккумуляторной батареи (кг); M0 - масса ЛА без батареи (кг).
В эти формулы входят коэффициенты, значения которых не были приведены. Это коэффициент тяги (alpha), коэффициент мощности (beta) и коэффициент аэродинамического качества Q. Между тем, производитель популярных пропеллеров APC приводит на своем сайте аэродинамические характеристики пропеллеров. По этим данным упомянутые коэффициенты могут быть легко подсчитаны. И тогда формулы тяги, мощности, эффективности и времени полета могут быть применены для реальных расчетов, а не только для теоретических выводов общего характера.
Вычисление коэффициентов тяги и мощности выполнялось методом наименьших квадратов. То есть определялись такие alpha и beta, которые дают наилучшее согласие формул тяги и мощности с данными APC. Для примера ниже показана зависимость тяги от оборотов для пропеллера 12x55MR. Синие крестики - данные АРС, красная линия - квадратичная теоретическая зависимость с найденным значением alpha.
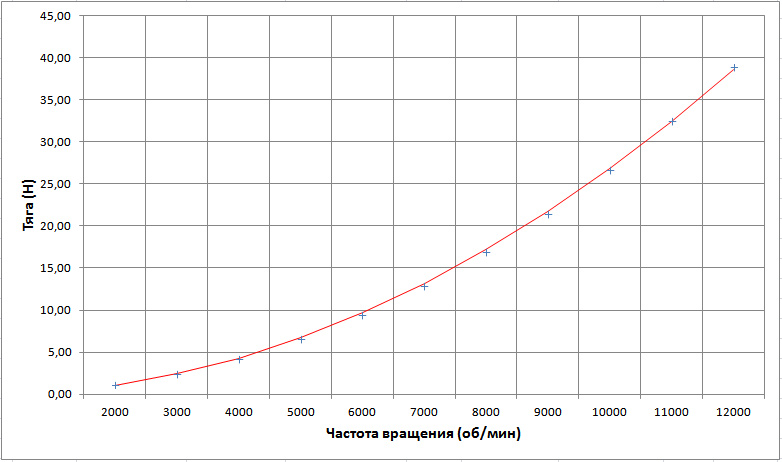
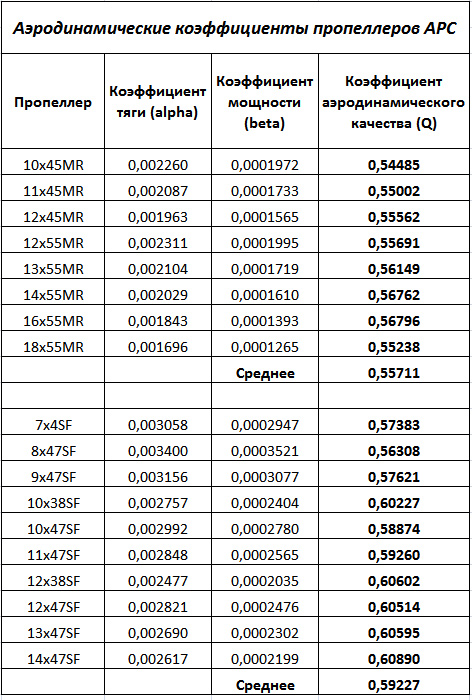
Результаты
Выводы
Коэффициент аэродинамического качества Q в пределах серии пропеллеров, имеющих одинаковую форму и отличающихся диаметром, меняется незначительно. Пропеллеры серии SF несколько эффективней пропеллеров серии MR и при одинаковых оборотах и сопоставимом шаге создают бОльшую тягу и расходуют бОльшую мощность.
Евгений Муфель любезно предоставил мне сделанную им выборку данных о пропеллерах APC серий MR и SF, за что его от души благодарю. 😃
Постскриптум от 15 января 2015 года
Как выяснилось в ходе продолжительных раскопок, расчетные данные APC (а на их сайте именно расчетные данные), которыми я пользовался, не очень хорошо соответствуют экспериментальным. Особенно в режиме работы пропеллера на месте - тот случай, который рассматривается здесь. Результаты экспериментальных исследований, выполненных в Иллинойском университете, можно посмотреть здесь: m-selig.ae.illinois.edu/props/propDB.html#APC Кроме того, я использовал данные Никиты Есенина, которые хорошо совпадали с данными UIUC. В результате значение коэффициента Q, рассчитанное по данным APC может быть занижено в полтора раза.
Сегодня данные на сайте APC обновлены. Соответствие по моим предварительным прикидкам стало гораздо лучше.
Исправлять в уже написанном ничего не буду. Будут новые результаты - будут новые публикации в дневнике.
Ссылки
- APC Propeller Performance Data
- С. Свердлов. Об эффективности несущего винта.
- С. Свердлов. Продолжительность полета электрического беспилотного вертолета.
Комментарии модерируются
Уже больше полугода назад опубликовал рассказ про постройку квадролета. С тех пор он достроен и немного перестроен. С самого начала цель была собрать аппарат, способный поднять в воздух хорошую камеру с большой матрицей. Но на зеркалки не ориентировался, потому что и для обычных фотографических занятий зеркалку Canon 60D поменял на Sony NEX-6. Поэтому и для съемок используется NEX. Специально для этого купил б/у NEX-5 с фиксированным объективом 16/2.8. Соображения по поводу покупки второй камеры изложены в статье О выборе камеры для аэросъемки с учетом риска
Перекомпоновка
Вначале площадки нижней пластины рамы F450 располагались спереди и сзади. На задней площадке был установлен приемник. Под передней планировалось расположить подвес с камерой. А сзади на рельсах шасси - аккумулятор. Но после предварительных прикидок пришел к выводу, что удобней площадки ориентировать поперек, а подвес расположить снизу рамы по центру. Угол обзора NEX с объективом 16 мм при таком расположении таков, что лучи и пропеллеры в поле зрения не попадают. Тем более, видеосъемку не практикую, а при фотосъемке камера чаще направлена вниз. Да и аппарат во время фотографирования обычно висит в одной точке, и рама может наклоняться вперед только для сопротивления ветру.
При расположении компонентов на раме соблюдались такие принципы:
- Приемники и передатчики должны располагаться дальше друг от друга, то есть на противоположных сторонах рамы.
- Усы приемной антенны подальше от силовых проводов.
- Силовые провода от аккумулятора подальше от компаса.
- Ни один элемент не должен попадать под воздушный поток под препеллерами.

Аппарат готов к полету
Картинки (эта и остальные) кликабельны
В результате размещение элементов получилось таким:
- Аккумулятор сверху вдоль, разъемами назад.
- GPS и компас - справа спереди у основания луча на складывающейся ноге.
- Приемник радиоуправления справа на площадке нижней пластины.
- Усы приемной антенны под прямым углом друг к другу в горизонтальной плоскости параллельно правым лучам на достаточном удалении от них.
- Видеопередатчик на левой площадке нижней пластины рамы с антенной (клевер), направленной вниз.
Сейчас видеопередатчик закреплен на алюминиевом уголке, приклепанном к левой площадке рамы. Это позволило опустить клевер существенно ниже (5см от земли), что заметно улучшило качество приема видеосигнала. В прежнем положении при повороте по курсу антенна затенялась корпусом аппарата (подвесом и камерой), что вызывало сильнейшие помехи. Теперь помехи тоже случаются, но гораздо меньше.
Измененное крепление видеопередатчика с антенной
Между пластинами рамы расположены (все закреплено на нижней пластине):
- Полетный контроллер Naza V2 на двухстороннем родном скотче. Немного правее центра, чтобы рядом поместился блок PMU
- Блок PMU на двустороннем скотче 3M (для наружного применения).
- iOSD mini на двухстороннем скотче 3M поверх PMU через проставку из бальсы.
- Преобразователь (BEC) 4S-6S -> 12В 3A для питания видеопередатчика и подвеса.
При такой компоновке все разъемы всех блоков доступны без разборки рамы.
На верхней пластине рамы также расположены:
- На липучке с фиксацией стяжкой закреплена “пищалка” - индикатор напряжения аккумулятора. Скоро переедет в другое место, откуда его показания можно будет читать с земли. Для подключения будет использован удлинитель балансирного провода. Пришлось его заказать, потому что на аккумуляторе Revolectrix балансирный провод всего 4см - никуда не достает.
- Там же на липучке с фиксацией липучим ремешком ставится GPS-трекер.

Вид с правого борта
Подвес
Подвес на БК-моторах собран на основе двухосевого DYS с заменой моторов, контроллера и модернизацией способа его крепления к раме.
Сборка и настройка подвеса заняла несколько месяцев. Подробности описать невозможно, перечислю основные события:
- Сгорел контроллер, который шел в комплекте.
- Потом сгорел еще один такой же. Моей вины в этом, вроде бы, не было.
- Оборвалась обмотка одного из штатных моторов. Видимо, в процессе припайки проводов к мотору. Делать это было крайне неудобно, а тоненькие проводки торчат в уязвимых местах. Разобрать мотор для ремонта не получилось.
- В третьем купленном контроллере подвеса (есть еще четвертый, пока не востребован) не работал датчик (где гироскопы и акселерометры). Куплен новый датчик.

NEX-5 на подвесе
Видны конвертер HDMI -> AV, сервомашинка спуска, подкладки из бальсы
В итоге:
- Моторы заменил на Tiger GB36-1. Тоже неидеальны. Через некоторое время один стал заедать. Подшипник (закрытый) оказался забит какой-то дрянью. Подшипник разобрал, промыл, смазал. Для установки моторов пришлось пересверлить отверстия в подвесе.
- Контроллер использован с прошивкой AlexMos, которую получилось обновить до версии 2.4.
- Штатные круглые гайки с осями 3/8" (тяжелые) заменены на штативные винты с такой же резьбой.
- Контроллер установлен на самодельной карбоновой пластине, через которую подвес крепится к раме. Там он хорошо защищен от повреждений. Это два раза выручало, когда при жесткой посадке подвес попадал в землю как раз тем местом, где штатно располагался бы контроллер. Гнуло при этом немного вертикальный алюминиевый рычаг подвеса. Легко исправлялось.

Подвес. Вид справа
Мотор Roll. “Домик” для датчика. Полый вал мотора позволяет хорошо проложить провод к мотору Pitch.
Камера крепится к рычагу подвеса обычным штативным винтом, но встает левым и правым краем на площадки из бальсы, которые предотвращают сдвиг камеры в полете. Для датчика, приклеенного к нижней стороне рычага pitch подвеса, построен “домик” из бальсы, который защищает датчик от повреждений - он довольно близко от земли.
БК-подвес. Вид сзади
Видны неиспользованные штатные отверстия крепления моторов и штативные винты, заменившие круглые гайки со стальными осями
Управление камерой
Вначале пробовал использовать инфракрасный спуск. Дома работало кое-как. Но на улице в полете никак не получилось. Закрывал инфракрасный светодиод от наружного света - ничего не вышло. Плюнул. Приклеил сверху на камеру сервомашинку на двухсторонний скотч - просто нажимает механически кнопку спуска (можно с полунажатием). Управляется трехпозиционным переключателем на пульте. Работает безотказно.
Наклон камеры по pitch управляется крутилкой на пульте. Настроено на углы от 0 (горизонтально) до 90 градусов (вертикально вниз).
Устранение вибраций подвеса
Долгое время не удавалось избавиться от сильной вибрации камеры по оси yaw (на которой нет мотора, подвес двухосевой). Для изучения характера вибраций ставил на рычаг лазерную указку и наблюдал ее след на баскетбольном щите в полете. След был горизонтальный. Убрать вибрацию удалось удалением 8 резиновых демпферов из 12 штатных. Сейчас в виброразвязке 4 демпфера, работающих на сжатие. По-видимому, дело в резонансе, возбуждаемом вибрациями рамы по yaw. Вообще-то, вибрации рамы небольшие, но при совпадении частот при жесткой виброразвязке попадало в резонанс.
FPV
В системе FPV использованы:
- Конвертер HDMI - AV. Работает нормально. И, как не удивительно, при выходе с двумя проводками (черный и желтый) на земле получаю и видео и звук. Объясните, кто знает, как такое может быть.
- Видео передатчик Boscam 5.8ГГц 400мВт с замененной штатной антенной на клевер.
- Приемник Boscam RC805 с антенной клевер.
- Рекордер XBox HD Recorder.
- Монитор Foxtech 7".

Кейс с аппаратурой
Сейчас там еще живут GPS-трекер и рекордер
Аккумуляторы
Изначально планировалось при полетах с камерой использовать аккумуляторы 5Ач 4S. Расчетное время висения при этом получалось около 10 минут. Не много, но для фотосъемки достаточно. При полетном весе 2600г примерно так и получается. Специально время не засекал, но есть запись реального полета 11 минут.
Обнаружилось, однако, что из 4-х аккумуляторов Zippy Flightmax 20C два (из одной партии) после нескольких циклов немного вздулись и с токоотдачей у них не очень. При полете в ветер индикация падения напряжения начинает мигать сразу после взлета на полностью заряженной батарее. Два других (из другой партии) ведут себя нормально. Недавно купил аккумулятор подороже Revolectrix 5200мАч 40С. При первом тестовом полете нечаянно просадил одну банку до 2.85В, но в дальнейшем все зарядилось и работает отлично. Время полета 12 минут. Думаю купить еще такой же или даже 9000Ач, с которым по расчету время полета должно быть около 15 минут.
Разъемы
В первом варианте аппарата для аккумуляторов использовались разъемы XT60. Но мне никогда не нравилось как они разъединяются. Разъемы маленькие и часто тугие, захватиться как следует трудно, при разъединении получается рывок, что создает риск оторвать провода. Когда на батареях 5Aч оказались разъемы bullet 4mm (HXT 4mm) заменил их поначалу на XT60. Но толстые провода 10AWG припаять к XT60 получилось плохо. Места пайки на XT маленькие, тонкие, пластмасса хоть и термостойкая, но плывет. А потом еще обнаружилось, что некоторые партии XT60 бывают довольно слабые, а другие - тугие. В итоге все разъемы заменил на bullet 4mm (HXT 4mm). Паять их намного удобней. Соединяются-разъединяются плотно, но мягко, никакого рывка - там пружинки. Очень доволен.
Перевозка. Чемодан
Вертолет, увы, не складной. При ближних поездках, если пассажиров мало, он едет на переднем пассажирском сиденье. Для дальних поездок купил чемодан. Самый большой и самый дешевый из тех, что были. На колесах. Предварительно измерил габариты с пропеллерами и шасси (а также подвесом и камерой). Из нескольких слоев толстого поролона (точнее, пористой термоизоляции) вырезал и склеил мягкую вставку в чемодан. В нее помещается вертолет в полной готовности к полету, есть отсеки для батарей, зарядки, проводов к зарядке.

Чемодан
В крышке тоже лист поролона
Чемодан, конечно, здоровый и в багажнике Форда Фокус занимает много места. Но для багажа у меня еще есть большой бокс Thule на крыше, поэтому все более-менее помещается. А чувствует себя коптер в чемодане хорошо. Проехал там уже больше 2 тысяч километров.

Полетный комплекс готов к перевозке
Чемодан с вертолетом, штатив, кейс с аппаратурой
Технические характеристики вертолета
Рама DJI F450
Моторы Tiger MT3506 650kv
Регуляторы DJI 30А Opto
Пропеллеры APC MR 12", шаг 4.5"
Полетный контроллер Naza M V2 с GPS
iOSD mini
Видеопередатчик Boscam 5.8Ггцб 400мВт, антенна клевер
Двухосевой БК-подвес:
Механика DYS
Моторы Tiger GB36-1
Контроллер AlexMos 2.4
Камера Sony NEX-5 с объективом 16мм
Вес подвеса с камерой 800г
Полетный вес (с аккумулятором Revolectrix 5200мАч 40С) 2700г
Полетное время 12 минут.
Фотографии
Начиная с мая сделал немало вылетов для фотографирования. Но не так много, как планировал. Технически все нормально. Но бывает стремно раскладываться со всем этим хозяйством в людных местах. Не в том смысле, что над людьми летаю. Не летаю. Но не нравится, когда на стартовой площадке собираются зеваки. Во-вторых, поначалу было стремно поднимать в воздух аппарат, на который вместе с камерой потрачено немало десятков тысяч рублей. Да и подходящую точку взлета бывает непросто найти, чтобы с хорошего ракурса снять ту или иную достопримечательность. Поначалу съемку делал в таком режиме: взлетел вверх немного спереди от себя, сфотографировал с разной высоты, сел. Сейчас, когда вижу, что все работает надежно (тьфу, тьфу, тьфу) и аккум хороший, уже отлетаю подальше и получаю больше свободы в выборе ракурса. На втором из приведенных ниже снимков можно разглядеть пилота в темной одежде на треугольном мысу в левой части кадра.
Оказывается также (это можно было прогнозировать), что аэроснимки не так часто обладают какой-то художественной ценностью. Чаще они интересны только тем, кто с объектом и местностью знаком.
Вот две фотографии, выложенные в открытый доступ. Первая - это моя родная деревня, вторая может быть интересна и сама по себе.
…wikimedia.org/…/Goritzy_September_2014.… (1.1 MB)
Горицы. Осень

На закате. Ферапонтово
Ферапонтов монастырь с фресками Дионисия входит в список всемирного наследия ЮНЕСКО
Комментарии модерируются.
В статье Продолжительность полета электрического беспилотного вертолета приводятся два критерия рационального выбора массы аккумуляторной батареи (АКБ).
Первый критерий основан на равенстве потерь в длительности полета и эффективности пропеллеров. Он был предложен для оценки верхней границы относительной массы АКБ, которая в этом случае составляет m = 2/(3*sqrt(3) - 2) = 0.626, где m - отношение массы АКБ к массе летательного аппарата (ЛА) без АКБ.
Второй критерий, предложенный для оценки минимальной относительной массы АКБ, основан на определении границы значений m, когда увеличение массы приводит к увеличению продолжительности полета, большему, чем относительное увеличение массы АКБ. Эта граница соответствует значению m = 0.355.
Можно, однако, привести еще одно разумное соображение для выбора массы АКБ.
Интегральный критерий
При малых значениях m (вплоть до m = 0.355) прирост массы АКБ дает относительный прирост времени полета, больший прироста массы АКБ. То есть наращивание массы АКБ в этом случае безусловно эффективно. Показателем этой эффективности может быть величина производной dt/dm. Если она больше 1, увеличение массы АКБ эффективно. При дальнейшем росте m (то есть при m > 0.355) эффективность увеличения массы становится меньше 1. Но за счет того, что при m<0.355 эффективность превышала 1, средняя (интегральная) эффективность остается высокой. Среднюю (интегральную) эффективность можно оценивать по отношению значения относительного времени к относительной массе АКБ. Если это отношение > 1, можно считать, что выбор массы аккумулятора правильный.
На рис. 1 показана зависимость относительного времени полета от относительной массы АКБ (m) (коричневая кривая) [1]. Отношение относительного времени к относительной массе АКБ равно 1 в точках прямой - биссектрисы координатного угла (черная линия).
Рис. 1. Зависимость относительного полетного времени от относительной массы АКБ (коричневая кривая)
Точка пересечения этих двух линий и дает искомое значение относительной массы, при котором средняя (интегральная) эффективность равна 1. Найти это значение можно, приравняв правую часть формулы (21) в [1] и значение m:
3*sqrt(3)*m/(2*(1 + m)^(3/2)) = m
(1)
Решая полученное уравнение относительно m, получаем:
m = 3/2^(2/3) - 1 = 0.89
(2)
На рис. 1 зеленым цветом показан участок графика зависимости относительного времени от относительной массы АКБ для 0.355 <= m <= 0.89, который соответствует обсуждаемому критерию и может считаться разумным диапазоном значений относительной массы АКБ.
Список источников
Статья посвящена изучению продолжительности полета электрического вертолета (классического или многороторного). Рассматривается время полета в режиме висения. Получена зависимость времени полета от энергоемкости (массы) аккумуляторной батареи и других параметров. Даны рекомендации по рациональному выбору аккумуляторной батареи.
Время полета
Будем рассматривать время полета в режиме висения летательного аппарата (ЛА). Оно может быть вычислено следующим образом:
T = W*eta/N,
(1)
где
T - время висения ЛА;
W - запас энергии батареи;
eta - коэффициент полезного действия силовой установки, учитывающий внутренние потери энергии в батарее, потери в проводах и электронных компонентах, а также КПД моторов. В режиме висения при установившемся режиме работы моторов КПД силовой установки можно считать постоянным.
N - мощность, расходуемая пропеллерами;
В свою очередь мощность, расходуемая на висение, пропорциональна нагрузке на пропеллеры и обратно пропорциональна эффективности пропеллеров.
N = P/E,
(2)
где P - вес ЛА (Н, Ньютонов); E - эффективность пропеллера (Н/Вт).
Замечу, что в формуле (2) фигурирует общий вес ЛА и эффективность отдельного пропеллера. Поэтому N - это полезная мощность всей силовой установки, которая может включать несколько ВМГ.
Запас энергии батареи определяется ее емкостью (обычно измеряется в ампер-часах или миллиампер-часах) и рабочим напряжением. В летательных аппаратах с электроприводом используются почти исключительно литий-полимерные аккумуляторы, обладающие высокой плотностью энергии на единицу массы. Средняя плотность энергии по результатам обработки данных о 21 аккумуляторной батарее из ассортимента сайта http://hobbyking.com (батареи емкостью от 4Ач до 8.4Ач, номинальным напряжением 11.1В и 14.8В) составила 486Дж/г (135Вт-ч/кг) при разбросе примерно ±10%.
От запаса энергии батареи зависит продолжительность полета летательного аппарата (ЛА). Запас энергии пропорционален массе батареи:
W = w*M
(3)
Здесь: W - энергия, запасенная заряженной АКБ (Дж); w - удельная энергоемкость аккумулятора (Дж/кг); M - масса батареи (кг).
Подставив в правую часть формулы (1), выражения из (2) и (3), получим:
T = w*eta*M*E/P
(4)
Эффективность пропеллера выражается следующим образом [1]:
E = Q*D*sqrt(ro/F)
(5)
Q - безразмерный коэффициент аэродинамического качества пропеллера;
ro - плотность воздуха (кг/куб.м);
D - диаметр пропеллера (м);
F - нагрузка на пропеллер (тяга, развиваемая пропеллером) (Н).
Нагрузка на отдельный пропеллер:
F = P/n,
(6)
где n - количество пропеллеров.
С учетом (6) формула (5) запишется в виде:
E = Q*D*sqrt(ro*n/P)
(7)
Зависимость времени полета от энергоемкости и массы аккумуляторной батареи
Исследуем зависимость продолжительности полета в режиме висения от запаса энергии (энергоемкости), а следовательно, массы АКБ при фиксированной конструкции вертолета и неизменных параметрах атмосферы. Объединим входящие в правую часть (7) величины, остающиеся в этих обстоятельствах постоянными. Обозначим
Ke= Q*D*sqrt(ro*n)
(8)
Тогда (7) можно переписать так:
E = Ke/sqrt(P)
(9)
Поставим полученное выражение для эффективности в формулу (4), позволяющую вычислить время:
T = w*eta*M*Ke/(P*sqrt(P))
(10)
Обозначим Kt = w*eta*Ke. C учетом этого перепишем формулу (10):
T = Kt*M/(P*sqrt(P))
(11)
или
T = Kt*M/P^(3/2)
(12)
Вес ЛА P складывается из веса конструкции за исключением аккумулятора и веса аккумулятора:
P = (M0 + M)*g,
(13)
M0 - масса вертолета без АКБ;
g - ускорение свободного падения.
Время полета:
T = Kt*M/(g^(3/2)*(M0 + M)^(3/2))
(14)
Еще раз объединяя константы, обозначим Ktg = Kt/g^(3/2). Получим:
T = Ktg*M/(M0 + M)^(3/2)
(15)
Разделим числитель и знаменатель правой части формулы (15) на M0^(3/2). Обозначим m = M/M0 - относительная масса АКБ. Получим:
T = Ktg/sqrt(M0)*m/(1 + m)^(3/2)
(16)
Обозначим K = Ktg/sqrt(M0). Тогда формула (16) приобретает вид:
T = K*m/(1 + m)^(3/2)
(17)
Коэффициент K содержит физические величины, от которых зависит абсолютное полетное время, а остальная часть формулы (17) выражает зависимость полетного времени от относительной массы батареи. Исследуем эту зависимость.
Отбросим на время коэффициент K и будем рассматривать условное время полета (T’).
T’ = m/(1 + m)^(3/2)
(18)
График функции (18) показан на рисунке 1.
Рис. 1. Зависимость (условного) времени полета от относительной массы аккумуляторной батареи
Максимальное время полета
Как видно, с ростом массы аккумулятора полетное время вначале возрастает, достигает максимума, а потом начинает уменьшаться. Определим, при какой массе АКБ достигается наибольшее время полета. Для этого найдем максимум функции (18). Продифференцируем (18) по m:
dT’/dm = (2-m)/(2*(m+1)^(5/2))
(19)
В точке максимума функции ее производная равна нулю. Правая часть (19) равна нулю при m = 2. То есть
Максимальное время полета достигается, когда масса аккумуляторной батареи вдвое превышает массу ЛА без батареи
Или по-другому:
Наибольшее время полета электровертолета (мультикоптера) достигается, когда масса аккумуляторной батареи составляет 2/3 полетной массы ЛА
Отсюда также следует еще один важный вывод:
_Масса аккумуляторной батареи не должна превышать удвоенную массу ЛА без батареи. _
_Масса аккумуляторной батареи не должна превышать 2/3 полетной массы ЛА. _
Увеличение массы батареи сверх этого значения уменьшает время полета.
Числовые значения функции (18) не имеют наглядной интерпретации. Поэтому есть смысл использовать ее относительные значения. Можно принять максимальное условное полетное время за 1. Тогда значения нормированной функции будут лежать в диапазоне он 0 до 1 и будут представлять собой долю от максимально возможного времени, что очень наглядно.
Найдем максимум значения функции (18) подставив в формулу (18) m = 2:
T’max = 2/(1 + 2)^(3/2) = 2/3^(3/2) = 2/sqrt(3^3) = 2/sqrt(27) = 2/(3*sqrt(3))
(20)
Разделим правую часть (18) на 2/(3*sqrt(3)). Обозначим полученную величину t - относительное полетное время. Получим:
t = 3*sqrt(3)*m/(2*(1 + m)^(3/2))
(21)
График этой функции показан на рис. 2.
Рис. 2. Зависимость относительного полетного времени от относительной массы аккумуляторной батареи
Можно оценить значения полетного времени при некоторых характерных значениях массы АКБ. Так, при m = 1 (масса батареи равна массе аппарата без батареи, то есть составляет половину полетной массы) полетное время составит 0.92 от максимального. При m = 0.5 (масса батареи составляет треть массы ЛА) полетное время оказывается равным 0.71 максимального.
Оптимальная масса АКБ по критерию сбалансированности потерь
Несмотря на то, что максимум полетного времени достигается при m = 2, это не значит, что всегда следует стремиться установить батарею такой массы. Как видно из приведенных выше значений относительного полетного времени для m = 1 и m = 0.5, значительное снижение массы аккумулятора не приводит к пропорциональному уменьшению времени полета. Это обусловлено тем, что при росте массы (веса) ЛА уменьшается эффективность пропеллеров. И может оказаться, что максимальное время полета достигается слишком большой ценой. Уменьшив же, даже довольно существенно, массу батареи можно получить время полета ненамного меньшее максимально возможного.
Исследуем зависимость эффективности пропеллеров от массы батареи. В соответствии с (9)
E = Ke/sqrt(P)
(22)
В соответствии с (13):
P = (M0 + M)*g,
(23)
Подставляя P из (23) в (22), получаем:
E = Ke/sqrt((M0 + M)*g)
(24)
Очевидно, что максимальная эффективность достигается при M = 0 и равна
Emax = Ke/sqrt(M0*g)
(25)
Практически это означает, что чем меньше аккумулятор, тем меньше его вес и тем выше эффективность ВМГ. При том, что время полета при малых M будет невелико.
Используем относительную эффективность, приняв максимальную относительную эффективность за 1. Поделив (24) на Emax получим:
е = sqrt(M0/(M0 + M)),
(26)
где e - относительная эффективность.
Поделив числитель и знаменатель подкоренного выражения в (26) на M0, получаем зависимость относительной эффективности от относительной массы АКБ m:
е = 1/sqrt(1 + m),
(27)
График зависимости (27) показан на рис. 3 (синяя кривая) вместе с графиком относительного полетного времени (коричневая кривая).
Рис. 3. Зависимость относительной эффективности (синяя кривая) и относительного полетного времени (коричневая кривая) от относительной массы АКБ
Итак, стремиться получить максимальное полетное время не всегда разумно, поскольку в этом случае существенно снижается эффективность пропеллеров, составляя всего 0.58 максимальной эффективности. Имеет смысл несколько уменьшить массу батареи, чтобы поднять эффективность при не очень большом снижении времени. Но до какой величины уменьшить массу? В большей мере пожертвовать эффективностью или полетным временем? Разумным и сбалансированным решением представляется снижение того и другого в одинаковой и, как можно надеяться, не очень большой степени. Такому варианту соответствует точка пересечения двух графиков на рис. 3. При снижении относительной массы АКБ до величины, соответствующей точке пересечения кривых, эффективность и полетное время составят, как видно из графиков, чуть меньше 80% от своих максимальных значений, что может быть вполне приемлемым.
Определим, при каком значении m значения относительного времени и относительной эффективности становятся одинаковы. Для этого приравняем правые части (21) и (27)
3*sqrt(3)*m/(2*(1 + m)^(3/2)) = 1/sqrt(1 + m)
(28)
Найдем корень этого уравнения. Опуская элементарные преобразования, получим:
m = 2/(3*sqrt(3) - 2) = 0.626
(29)
То есть сбалансированной с точки зрения равенства потерь времени и эффективности является АКБ, масса которой составляет 0.626 массы ЛА без батареи. Если вычислить процентное отношение массы батареи к общей массе ЛА (обозначим m%), получится
m% = 2/(3*sqrt(3))*100% = 38.5%
(30)
Не удержусь от того, чтобы заметить, что полученное значение очень близко к пропорции “золотого сечения”, которая составляет
(sqrt(5) - 1)/(sqrt(5) + 1) = 0.382 = 38.2%
Сбалансированной с точки зрения равенства потерь времени и эффективности является АКБ, масса которой относится к полетной массе ЛА в пропорции золотого сечения, то есть составляет около 38%.
Подставляя найденное значение m в формулу (27) получим, что при такой массе батареи время полета и эффективность составят sqrt(1 - 2/(3*sqrt(3))) = 0.784, то есть 78.4% от своих наибольших возможных значений. Таким образом, уменьшение массы батареи более чем втрое (0.626 против 2.0) уменьшает время полета лишь на 21.6%.
Дифференциальный критерий выбора массы АКБ
На рис. 4 показан график функций (21) (27) в диапазоне значений относительной массы m от 0 до 2.0 с одинаковым масштабом по осям.
Рис. 4. Зависимость относительного полетного времени (коричневая кривая) и относительной эффективности (синяя кривая) от относительной массы АКБ
При малых значениях m наклон графика относительного времени к оси абсцисс составляет больше 45 градусов . Это означает, что в этом случае увеличение массы (а значит и емкости) аккумулятора приводит к росту полетного времени большему в относительном выражении, чем прирост емкости. Например, рост массы на 1% приводит к приросту времени больше 1%. Это означает, что увеличение емкости эффективно. Область значений m, когда увеличение емкости эффективно, простирается от 0 до точки, где производная dt/dm = 1. Учитывая (19) и (21), получаем уравнение для определения указанной точки:
3*sqrt(3)/2*(2-m)/(2*(m+1)^(5/2)) = 1
(31)
Численное решение уравнения (31) дает значение m = 0.355. Напомню, что m - это отношение массы АКБ к массе ЛА без АКБ. В процентах от полетного веса масса АКБ составит m% = 0.355/(1 + 0.355)*100% = 26.2%. Полетное время по формуле (21) при этом оказывается равным 58.5% от максимального. Уменьшение времени против максимального оказывается существенным. Полученные величины m и m%, по-видимому, можно считать минимально рекомендованными значениями относительной массы АКБ.
Имеет смысл увеличивать массу (энергоемкость) АКБ как минимум до величин, когда прирост массы дает не меньший прирост времени, то есть до 35.5% массы ЛА без АКБ или, что то же самое, до 26.2% полетной массы
На рис. 4 зеленым цветом показан участок графика относительного времени в рекомендованном диапазоне относительной массы АКБ.
Коэффициент полетного времени
В соответствии с формулой (17) время полета вычисляется так:
T = K*m/(1 + m)^(3/2)
(32)
Входящий в (32) коэффициент K выражается следующим образом:
K = w*eta*Q*D*sqrt(ro*n/M0)/g^(3/2)
(33)
Внесем диаметр пропеллера D под знак квадратного корня:
K = w*eta*Q*sqrt(ro*D^2*n/M0)/g^(3/2)
(34)
Произведение D^2*n пропорционально площади, заметаемой n пропеллерами при вращении. Произведение M0*g = P0 - вес ЛА без батареи. Площадь круга диаметра D равна S = Pi*D^2/4. Отношение веса к площади, заметаемой пропеллерами, дает величину удельной нагрузки (давления) на пропеллеры: p0 = P0/(n*S). Выполняя соответствующие подстановки и элементарные преобразования, из (34) получаем:
K = 2*w*eta*Q*sqrt(ro/Pi)/(g*sqrt(p0))
(35)
Рецепт долголета
Подставляя выражение для К из (35) в (32) получаем формулу для продолжительности полета вертолета в режиме висения:
Т = 2*w*eta*Q*sqrt(ro/Pi)/(g*sqrt(p0))*m/(1 + m)^(3/2),
(36)
где
T - время полета в режиме висения (с);
w - удельная энергоемкость аккумулятора (Дж/кг);
eta - безразмерный коэффициент полезного действия силовой установки;
Q - безразмерный коэффициент аэродинамического качества пропеллера;
ro - плотность воздуха (кг/куб.м). Для стандартной атмосферы по ГОСТ 4401-81 составляет 1.225кг/куб.м;
Pi = 3.14159;
g - ускорение свободного падения (м/с^2);
p0 - удельная нагрузка на пропеллеры, рассчитанная по весу ЛА без АКБ (Н/кв.м);
m - относительная масса АКБ. m = M/M0, где M - масса аккумуляторной батареи (кг); M0 - масса ЛА без батареи (кг).
Формула (36) в традиционной записи:
Рекомендации по выбору относительной массы АКБ были даны выше. Из (35) и (36) с очевидностью следует, что продолжительность полета растет пропорционально увеличению КПД силовой установки, аэродинамическому качеству пропеллеров, удельной энергоемкости батареи. Однако рассчитывать на существенное увеличение этих параметров при проектировании ЛА, как правило, не приходится. В то же время для увеличения продолжительности полета следует уменьшать, насколько это возможно, удельную нагрузку на пропеллеры. Время полета увеличивается обратно пропорционально квадратному корню из удельной нагрузки на пропеллеры.
Вычислительный эксперимент
Поскольку для экспериментального исследования продолжительности полета в зависимости от массы аккумулятора возможностей пока не нашлось, была проведена серия вычислительных экспериментов. Для этого использовался Калькулятор для мультикоптеров (Version: X6.06, 31.01.14 / Data: 22.02.14 with 3294 Motors), разработанный Markus Mueller. Результаты по продолжительности полета (висения), полученные с помощью этого калькулятора, хорошо совпадают с фактическими. Так, расчеты, выполненные при проектировании построенного мной квадрокоптера, совпали с результатами тестовых полетов с точностью до минуты [2].
Были выполнены две серии расчетов для следующих конфигураций ЛА:
-
Квадрокоптер, примерно совпадающий по характеристикам с моделью DJI Phantom. Вес без ВМГ 300г, пропеллер диаметром 9", шаг 4.5". Моторы Tiger Motor MS 2212-13 (980kv). Аккумуляторные батареи 11.1В (3S) 2500мАч 35/50С. Масса одной батареи 210г. Количество батарей менялось от 1 до 7.
-
Квадрокоптер, описанный в статье Квадролет [2]. Вес без ВМГ 482г, пропеллер диаметром 12", шаг 4.5". Моторы Tiger Motor MT 3506-25 (650kv). Аккумуляторные батареи 14.8В (4S) 2500мАч 35/50С. Масса одной батареи 280г. Количество батарей менялось от 1 до 11.
В ходе расчетов выяснилось следующее обстоятельство. При увеличении количества АКБ (при фиксации веса без ВМГ) полетная масса в калькуляторе увеличивается больше, чем увеличивается вес собственно батарей. Например, при добавлении второй батареи весом 210г к конфигурации 1), полетный вес, сообщаемый калькулятором, увеличивается на 231г. В проектном расчете это может объясняться учетом дополнительного веса проводов и другими подобными обстоятельствами, но при проверке обсуждаемой теории такой подход искажает картину. Поэтому для каждой конфигурации были выполнены расчеты по двум методикам:
а) При изменении количества батарей полетный вес берется таким, какой сообщает калькулятор при фиксированном в калькуляторе значении “Вес без ВМГ”.
б) “Вес без ВМГ” в калькуляторе корректируется так, чтобы полетный вес за вычетом суммарной массы батарей оставался постоянным.
Результаты вычислительного эксперимента представлены на рис. 5 и 6. На каждом графике две кривых. Синяя - расчет по методике а); Коричневая - по методике б)
Рис. 5. Зависимость времени висения (мин) от относительной массы АКБ. Конфигурация 1)
Рис. 6. Зависимость времени висения (мин) от относительной массы АКБ. Конфигурация 2)
Список источников
- С. Свердлов. Об эффективности несущего винта.
- С. Свердлов. Квадролет
Постоянно в форуме возникают вопросы о выборе конфигурации мультикоптера. Чтобы помочь в таком выборе, были написаны статьи Об эффективности несущего винт а и Проектирование мультикоптера. Надеюсь, кому-то они облегчили задачу. Но, чтобы все было еще проще - еще одна заметка.
Выбор размера пропеллеров по полетному весу
Эффективность несущего винта пропорциональна его диаметру и обратно пропорциональна квадратному корню из величины нагрузки (подробности здесь). Это означает, что эффективность можно оценивать по удельной нагрузке (давлению) на винты, то есть по отношению полетного веса мультикоптера к площади, заметаемой его пропеллерами. Результаты тестов позволяют оценить подходящие значения этой величины. Они приведены в таблице.
Удельная нагрузка на пропеллер
Чем меньше давление, тем лучше. Зеленые строки показывают значения, обеспечивающие высокую эффективность.
Желтые - приемлемую, которая может быть характерна для нагруженного коптера.
Красные - низкая эффективность.
Как рассчитать давление
Давление (p) - отношение веса мультикоптера (P) к площади кругов, описываемых пропеллерами:
p = P/(n*S)
Здесь n - количество пропеллеров; S - площадь круга, описываемого (заметаемого) одним пропеллером.
S = pi*(D^2)/4
D - диаметр пропеллера. Поскольку диаметр пропеллеров обычно задается в дюймах, то и площадь можно считать в квадратных дюймах. В первой колонке таблицы как раз приведены такие значения.
Формула для расчета диаметра пропеллера
Из приведенных выше соотношений можно получить формулу, позволяющую по выбранному значению давления вычислить диаметр пропеллеров. Вот она:
D = 2*sqrt(P/(pi*n*[p]))
sqrt - квадратный корень. Чтобы не перепутать, я обозначил [p] - допустимое давление, которое надо взять из таблицы. P-большое - это вес коптера (в граммах). Если [p] берется в г/кв.дюйм (левая колонка таблицы), то и диаметр пропеллера получится в дюймах.
Вычислив константы заранее, можно формулу еще упростить:
D = 1.13*sqrt(P/(n*[p]))
Для квадрокоптера (n=4):
D = 0.564*sqrt(P/[p])
Например. Вес квадрокоптера (n=4) 1кг (1000г). Хотим летать долго (и счастливо:)), поэтому возьмем давление 2,5г/кв.дюйм. Получается:
D = 2*sqrt(1000/(3.14*4*2.5)) = 11,3"
Построил квадрокоптер специально для фотосъемки с воздуха. Камера у меня Sony NEX-6. К ней есть хороший набор хороших объективов. Но стрёмно как-то ее в воздух поднимать… Все-таки вероятность падения квадрокоптера явно отлична от нуля. Поэтому купил специально для аэросъемки Sony NEX-5 первого поколения б/у за $199. По картинке она не особенно уступает (если уступает) более новым моделям NEX-5.
В новогодние каникулы все-таки не удержался и пару раз поднял в воздух NEX-6. Обошлось. Вот фотографии.
Каток на стадионе “Локомотив” в Вологде. Музей “Семенково”
Но больше NEX-6 поднимать не буду. Придет с ebay NEX-5 - буду с ней летать. Она, к тому же, на 100г легче.
Вероятностная оценка ущерба
Возникают, однако, любопытные вопросы. Насколько рациональна покупка второй камеры и выгодно ли это? Какова должна быть цена второй камеры, чтобы уменьшить ущерб в случае аварии при разной вероятности аварии? Это нехитрая задача по теории вероятностей. Вот ее решение.
Обозначим p - вероятность аварии в течение всего времени полетов с камерой. Будем считать, что при аварии камера выходит из строя и становится непригодной к использованию. Или можно принять, что p - это просто вероятность выхода камеры из строя при полетах.
Пусть X - цена камеры, купленной для полетов. Y - цена дорогой камеры, на замену которой куплена камера подешевле.
Цена X должна быть такой, чтобы возможный ущерб был меньше ущерба, связанного с возможной потерей дорогой камеры.
Математическое ожидание ущерба при полетах с дорогой камерой равно Y*p. Мат.ожидание ущерба при полете с дешевой камерой равно X*p. (Математическое ожидание - это среднее значение ущерба, рассматриваемого как случайная величина. То есть, если летает множество пилотов, то мат.ожидание в нашем случае - это средний ущерб по всем). Кроме этого, чтобы купить вторую камеру, пришлось заплатить еще сумму X.
Поэтому, чтобы покупка второй камеры была выгодна, нужно, чтобы (вероятный) ущерб от ее потери был меньше, чем в случае с дорогой камерой. Это условие запишется так:
X + X*p < Y*p
(1)
или:
X*(1+p) < Y*p
(2)
Поделив обе части (2) на Y, получим:
X/Y < p/(1+p)
(3)
Вот таблица значений и график правой части формулы (3):
Максимальная разумная стоимость второй камеры в зависимости от вероятности аварии
(в долях от цены первой)
Мораль
Ничего неожиданного. Если вероятность в конце концов грохнуться равна 1 (что, я думаю, недалеко от истины 😃), то специально купленная летающая камера должна быть, минимум, вдвое дешевле нелетающей. Если вы оцениваете вероятность падения в 50% (как в анекдоте про 50-процентную вероятность появления пришельцев: или прилетят или нет: или грохнется или нет), то летающая камера должна быть дешевле втрое (это уже не так банально). Ну, а если авария исключена (вероятность 0), то вторая камера не нужна.
Как-то так. 😃
В форуме часто возникают вопросы о выборе параметров мультикоптера для тех или иных целей. Если опыта нет, то бывает трудно оценить какого размера, с какими пропеллерами и моторами аппарат подходит. Для того, чтобы с зеркалкой, например, летать. Калькулятор новичков, бывает, пугает.
Специально для таких случаев сделал расчеты, позволяющие предварительно оценить основные параметры коптера по заданному полетному весу. Результаты сведены в таблицы. По ним можно определить необходимый размер пропеллеров при выбранной схеме (квадро, гекса, окто) и мощность моторов.
Таблица 1
Увеличить
Таблица 2
Увеличить
Таблица 1 позволяет определить параметры для значений эффективности 6-8 грамм/Ватт. Таблица 2 - для значений 9-11 грамм/Ватт. Эффективностью около 6 обладает, например, квадрокоптер, собранный из стандартного набора DJI F450 с пропеллерами 8 дюймов и батареей 3000мАч номинальным напряжением 14.8В (4S). При установке на ту же раму 12-дюймовых пропеллеров и более мощных моторов можно получить эффективность около 10 грамм/Ватт.
Чем выше выбрать значение эффективности, тем большего размера получится аппарат, но тем дольше он сможет летать на той же батарее (при условии одинакового полетного веса).
В колонках “Время висения” указано время полета для батареи 1S (3.7В) емкостью 1Ач (1000мАч). Чтобы получить время полета для другой батареи надо число из таблицы умножить на количество “банок” в батарее и емкость в Ампер-часах. Например, батарея 4S 3Ач. Тогда значение времени из таблицы надо умножить на 4 и на 3, то есть на 12.
Расчеты выполнены на основе материалов, опубликованных в статье “Об эффективности несущего винта”. Коэффициент аэродинамического качества пропеллера определен по результатам тестовых полетов, которые приведены в статье “Квадролет”.
Эффективность в таблицах указана для режима висения.
Значения, приведенные в таблицах 1 и 2, следует рассматривать как сугубо приблизительные. Чтобы оценить порядок величин. Для уточнения конфигурации рекомендую использовать Калькулятор.
Размеры рамы
При том же размере пропеллеров размер рамы (расстояние между осями противоположных моторов) октокоптера будет больше рамы гексакоптера, а гексакоптер будет больше квадрокоптера (Таблица 3).
В таблице 4 приведены габаритные размеры вертолета (диаметр описанной вокруг аппарата окружности).
Предполагается, что коптер строится по классической схеме, когда винты расположены в одной плоскости и круги, ими описываемые, не пересекаются.
Es gibt nichts Praktischeres als eine gute Theorie (нем.)
(Нет ничего практичней хорошей теории)
Приписывается Г. Р. Кирхгофу
По моим наблюдениям существует масса заблуждений и непонимания в оценке и сравнении эффективности пропеллеров и винто-моторных групп (ВМГ) вертолетов и мультикоптеров. В первую очередь это относится к выбору пропеллеров и ВМГ для мультикоптера, поскольку в этом случае, в отличие от вертолетов, есть большая свобода, и тот, кто приступает к самостоятельной постройке мультикоптера (вертолеты обычно собирают из готовых наборов), должен решать задачу такого выбора.
Ниже приведено небольшое теоретическое исследование, вносящее ясность в вопрос об эффективности несущего винта (пропеллера мультикоптера). Эффективность мотора не обсуждается. Для понимания материала достаточно знаний в пределах школьного курса.
Предмет рассмотрения
Конструкции несущего винта вертолета и пропеллеров мультикоптера отличаются. На вертолетах (кроме простейших моделей) используется основной винт с переменным шагом и автоматом перекоса. На мультикоптерах в подавляющем большинстве случаев применяют пропеллер с фиксированным шагом. Общее состоит в том, что винт (пропеллер) является несущим, вращается вокруг вертикальной (в состоянии висения летательного аппарата) оси и создает подъемную силу, удерживающую летательный аппарат (ЛА) в воздухе. Приведенные ниже выкладки могут быть отнесены как к одному, так и к другому случаю, разве что, некоторые коэффициенты в уравнениях, описывающих работу винта, которые могут считаться постоянными в случае пропеллера с фиксированным шагом, меняются при изменении шага. Будем считать, что основным предметом интереса является пропеллер мультикоптера. Рассматривается эффективность винта в режиме висения ЛА.
Критерий эффективности несущего винта в режиме висения
Для оценки эффективности многих машин используется коэффициент полезного действия (КПД) - отношение полезной работы (мощности) к затраченной. Однако в случае, когда ЛА неподвижен (находится в режиме висения) никакой полезной работы не совершается. Энергия целиком расходуется на преодоление сил сопротивления: сопротивления воздуха вращению винта, потерь в двигателе, трансмиссии (в случае бесколлекторного мотора - в подшипниках), потерь в проводах, источнике электропитания. В такой ситуации КПД = 0 и использовать значение КПД для оценки эффективности пропеллера и винтомоторной группы (ВМГ) бессмысленно. Между тем, даже в режиме висения вертолет приносит пользу, удерживая полезную нагрузку. Чем меньше энергии при этом ЛА расходует на удержание полезной нагрузки - тем лучше. Естественным образом возникает показатель эффективности как отношение веса полезной нагрузки к затрачиваемой для ее удержания мощности. Поскольку речь в этой статье идет об эффективности собственно пропеллера, вес самого летательного аппарата тоже может быть отнесен к полезной нагрузке. По отношению к пропеллеру можно вообще не говорить о полезной нагрузке, а рассматривать отношение тяги, создаваемой пропеллером, к мощности, которая требуется для его вращения. В практике постройки многороторных вертолетов (мультикоптеров) используют размерность грамм на ватт, поскольку вес таких ЛА обычно не превышает нескольких килограммов.
Надо однако заметить, что значение эффективности, выражаемое отношением тяги к мощности, не остается постоянным (или даже примерно постоянным) для данного пропеллера, а меняется с изменением оборотов, нагрузки и т.д.
Обозначения
Поскольку запись формул в обычном виде здесь затруднительна, я буду использовать нотацию, принятую в языках программирования, когда формулы записываются в одну строку. Основные обозначения такие:
* - знак умножения, он никогда не пропускается;
/ - знак операции деления;
sqrt(x) - квадратный корень из икс;
^ - знак операции возведения в степень. Например, x^2 - это икс в квадрате; Операция “^” имеет приоритет выше умножения и деления, поэтому, например x^2/3 означает икс в квадрате, деленное на три, а x^(2/3) - икс в степени две третьих.
Если в формулах будут встречаться греческие буквы, они будут обозначаться так: alpha, beta, … Номера формул будут записываться в круглых скобках справа от формулы.
Аэродинамика пропеллера
Сила тяги, создаваемая пропеллером (F), и мощность, необходимая для вращения пропеллера (N), выражаются такими формулами [1]:
F = alpha*ro*n^2*D^4 (1)
N = beta*ro*n^3*D^5 (2)
Здесь:
alpha и beta - безразмерные коэффициенты тяги и мощности. Зависят от скорости набегающего потока и формы винта. При висении, когда скорость набегающего потока равна нулю, зависят только от формы винта;
ro - плотность воздуха;
n - частота вращения винта;
D - диаметр винта;
Эффективность винта
Рассмотрим, каким образом эффективность винта зависит от полезной нагрузки (тяги). Для этого выразим из формулы (1) частоту n:
n = sqrt(F/(alpha*ro*D^4) = sqrt(F/(alpha*ro))/D^2 (3)
Подставим n из (3) в формулу (2):
N = beta*ro*(sqrt(F/(alpha*ro))/D^2))^3*D^5 = beta*ro*(F/(alpha*ro))^(3/2)/D (4)
Вычислим эффективность пропеллера (E), разделив силу тяги F на мощность, выраженную формулой (4):
E = F/N = F/(beta*ro*(F/(alpha*ro)^(3/2)/D) (5)
Упрощая правую часть (5), получим:
E = D*alpha^(3/2)/beta*sqrt(ro/F) (6)
Коэффициент alpha^(3/2)/beta характеризует аэродинамическое качество пропеллера и в режиме висения зависит только от формы винта. Обозначим этот коэффициент
Q = alpha^(3/2)/beta (7)
Тогда эффективность выражается так:
E = Q*D*sqrt(ro/F) (8)
В режиме висения тяга, создаваемая несущими винтами, равна весу ЛА. Поэтому F можно понимать как часть веса ЛА, приходящуюся на один пропеллер. То есть F в формуле (8) - это тяга, которую должен развить пропеллер, чтобы удержать ЛА.
Таким образом, из (8) следует, что эффективность пропеллера прямо пропорциональна его диаметру и обратно пропорциональна квадратному корню из величины тяги, которую должен создать пропеллер.
Учет температуры и атмосферного давления
Чтобы выразить плотность воздуха через атмосферное давление и температуру, используем уравнение Менделеева-Клапейрона [2]:
p*V = m/mu*R*T (9)
Здесь:
p - давление;
V - объем;
m - масса;
mu - молярная масса. Для воздуха mu = 29 г/моль.
R - универсальная газовая постоянная;
T - температура (по Кельвину).
Плотность - отношение массы к объему:
ro = m/V (10)
Выражая m/V из (9), получим:
ro = mu*p/(R*T) (11)
Подставляя выражение для плотности из (11) в (8), получаем:
E = Q*D*sqrt(mu*p/(R*T*F)) (12)
Обозначим С = sqrt(mu/R) - для воздуха это константа. Тогда формула для эффективности окончательно будет выглядеть так:
E = C*Q*D*sqrt(p/(T*F)) (13)
То есть, эффективность пропеллера в режиме висения прямо пропорциональна коэффициенту его аэродинамического качества (зависит от формы), диаметру и квадратному корню из атмосферного давления. Обратно пропорциональна квадратному корню из температуры воздуха (в Кельвинах) и квадратному корню из силы тяги, которую должен создать пропеллер.
Список источников:
- Прицкер Д. М., Сахаров Г. И. Аэродинамика. М., Машиностроение, 1968
- Википедия. Уравнение Менделеева-Клапейрона: ru.wikipedia.org/…/Уравнение_Менделеева-Клапейрона.
Построил квадролет. Даже несколько вариантов. Публикую конфигурацию.
Немного предыстории
В начале этого лета купил вертолет. MJX F45. Довольно большой, 4-канальный с фиксированным шагом. Звезды так сошлись. У сына на даче увидел отличную лужайку для полетов, у внука день рождения на носу, ну и в подкорке детские неосуществленные мечты. Выбрал модель побольше с тем прицелом, что он что-то снимающее сможет поднять. Пока заказ шел из Москвы, понял, что для внука (6 лет) эта штука категорически не подходит. Стал сам летать. Быстро стало понятно, что поднять сколько-нибудь серьезную камеру этим аппаратом не получится. Во-первых, потому, что грузоподъемность не та. Во-вторых, управление таким вертолетом - совсем непростое дело и вероятность падений очень велика. Тем не менее полеты интересны. Обзавелся несколькими микровертолетами. Научился неплохо дома летать на совершенно замечательном Blade MCX2.
Про коптеры раньше знал. Впечатляли работы команды Airpano, которая в последнее время как раз перешла с вертолета на гексакоптер. Но постройка коптера представлялась совершенно загадочным делом. В какой-то момент (где-то в прошедшем октябре), однако, наступило просветление - стало понятно, что его можно собрать из готовых комплектующих. Особенную проблему для меня представляет электроника, в которой не разбираюсь. Но, увидев коробочку Назы, понял, что есть вариант plug-and-play - то, что надо.
Задача
- Просто чтоб летало и не падало. Чтоб не требовалась особенная ловкость рук для удержания аппарата в воздухе и осмысленных маневров, как в случае с вертолетами. Но это - так. Вертолет все-таки машина красивей, если просто полетать.
- Аэрофотосъемка. Фотографию люблю. К видео равнодушен. Давно уже было желание сделать снимки с воздуха дорогих для себя мест. Именно снимки, не видео. Качественные снимки, на приличную камеру. И даже не панорамы, которыми одно время увлекся, но сейчас поостыл. Недавно распродал зеркальную систему Canon (60D+объективы) - надоело тяжести таскать - и перешел на Sony NEX-6. К нему есть хороший набор объективов.
- По мере погружения в тему обнаружилась еще одна цель - полеты FPV. Судя по всему, это интересно.
Выбор конфигурации
Про электронику написал - никакие варианты, требующие прошивки и какой-либо возни по настройке не подходят. Стиль open source тоже не близок. Naza, короче. Ее концепция очень нравится. Раму мог бы и сам сделать, но как-то уже нет желания пилить-строгать. Значит, готовая. Рамы DJI понравились. Остроумной конструкцией. Тем, что они массово клонируются, что тоже подтверждает, что рама удачная. Лучи повсеместно используются в других вариантах: рептилии всякие, TBS. Впечатлило видео, демонстрирующее прочность рамы - это когда ее об стенку бьют и с высокого этажа на асфальт. Просто и недорого.
Вначале ориентировался на гексу - как будто бы надежней. Теоретически может лететь при отказе мотора. Дорогую камеру собрался поднять, хочется максимальной надежности. Однако после консультации в здешнем форуме выяснилось, что реальных случаев мягкой посадки гексы при отказе ВМГ не обнаруживается. Все равно случается креш: тряска от сломавшегося пропеллера и т.п. Поэтому был выбрана схема квадро. В полтора раза дешевле рама+привод. Сама рама DJI F550 довольно тяжелая, в то время как F450 - 282 грамма - не рекордный вес, но очень прилично. Еще после некоторых прикидок выяснил, что квадрокоптер оказывается эффективней гексы, дает больше возможностей апгрейда. На квадро-раму 450 мм помещаются пропеллеры до 12 дюймов, а на гексу 550 - только 10-дюймовые. Строить большой аппарат не хотелось, поэтому варианты вроде Tarot 650 были отброшены.
В итоге решил построить квадр из готового набора DJI: рама F450, моторы, регуляторы, пропеллеры + Naza V2. Как вариант с правильно подобранными компонентами от солидного производителя. Чтобы получить первоначальный опыт.
План апгрейда
Параметры стандартного набора не позволяли рассчитывать на полет с NEX. То есть поднять он ее, вероятно, поднимет, но время полета будет небольшим. Сразу оговорюсь, что Sony NEX планируется использовать для фото, а не видео. Поэтому гиростабилизированный подвес не предполагается. Это снижает вес полезной нагрузки.
Засел за расчет апгрейда. Делал это с помощью калькулятора: ecalc.ch Калькулятор показал себя с самой лучшей стороны. Кроме того, что с его помощью просчитан вариант модернизации, который пока полностью себя оправдывает, калькулятор позволил понять основные зависимости между параметрами коптера: весом, параметрами пропеллеров, моторов, аккумуляторов. И если перед началом этих расчетов я эти связи практически совсем не понимал, то теперь все или почти все встало на свои места. Очень ценная в этом отношении вещь. Рекомендую: ecalc.ch
Результат расчетов оказался такой: питание 4S, моторы Tiger MT3506 650kv, пропеллеры 12 дюймов. Критерием подбора было время висения. При условии, что газ висения при максимальной нагрузке находится в пределах 60%. Именно этот мотор обеспечил по расчету максимальную продолжительность полета. Рассматривались также моторы Sunny Sky, про которые масса хороших отзывов. Но обнаружил противоречия в данных о подходящем моторе. Было даже не понятно, есть подходящая по параметрам модель в природе или нет. Сайт разработчика довольно невнятный, на сайтах продавцов то одно, то другое, фотографии изделия не соответствуют характеристикам и т.п. Поэтому в отсутствие опыта решил не рисковать и раскошелиться на Tiger’ы. Прикидывал также вариант с Tiger MT4006, но он многополюсный, а в форуме встретилось сообщение, что регуляторы DJI могут иметь проблемы с многополюсными моторами. Проверять это на себе не хотелось. А один из смыслов приобретения стандартного набора DJI состоял в том, что имеющиеся в его составе регуляторы 30А Opto, могут использоваться и с другими моторами, имея запас по току. К тому же, по расчету MT3506 650kv давал лучшие результаты и был дешевле 4006.
Базовая конфигурация
- Рама, моторы, регуляторы, пропеллеры DJI, полетный контроллер Naza V2: goodluckbuy.com/dji-f450-quadcopter-with-esc-motor…
- Аккумуляторы Zippy Flymax 4S, 3000mah, 20C (2 штуки): www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
- Провод для подключения аккумулятора: banggood.com/XT60-Male-Plug-10AWG-10cm-With-Wire-p…
В ките DJI имеется два проводка (черный и красный) для подключения батареи, но без разъема. Разъемы XT60 тоже прикупил, но воспользовался этим проводом, у которого разъем уже припаян. - Ремешок-липучка для крепления батареи: www.ebay.com/itm/300816320012
Штатный ремешок DJI для моего способа крепления батареи (ремешок не охватывает плату снизу) коротковат. - Индикатор напряжения (пищалка): banggood.com/Wholesale-1S-8S-Li-po-Battery-Voltage…
- Передатчик и приемник Futaba: www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXBWGR
- Зарядное устройство iMax B6AC: www.ebay.com/itm/190818922305
- Провод с разъемом XT 60 для подключения к зарядке: www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Вот он, красавец. С пропеллерами 8x4.5
Да, черные стяжки - полное г…но. На холоде просто распадаются. Заменены на белые - очень прочные.
Особенности компоновки
Белые лучи спереди, красные сзади, как у автомобиля. Аккумулятор вдоль. Naza приклеена на нижнюю плату. PMU - на верхнюю изнутри. Приемник на задней площадке нижней платы. GPS у основания переднего луча на двух винтах в положении, когда он подальше от пропеллера (в дальнейшем установлены большие 12" пропеллеры).
Придумал, как кажется, отличное крепление приемной антенны. В документации Futaba рекомендуется размещать антенну так, чтобы усы ее рабочей части располагались под прямым углом. Вначале хотел запустить две части антенны вдоль лучей: на квадре там прямой угол. Но там же вдоль лучей и силовые провода и регуляторы. Да и плохо до лучей кабели антенны дотягиваются.
Взял пробку от винной бутылки. Выбрал не из натуральной пробки, а пластиковую. Для вина это, конечно, хуже, а для вертолета, думаю, лучше - не крошится. В пробке два диаметральных, скрещивающихся под прямым углом отверстия. Делал сверлом 2 мм, но, думаю, что можно даже шилом. В отверстия протягиваются усы антенны и хорошо держатся там трением. На выходе из пробки одного из отверстий в сторону приемника сделан надрез, в который утоплен дальний от приемника провод, чтобы он не висел и чтобы лучше фиксировался. Пробка вначале была приклеена к боковой стороне приемника двухсторонним скотчем, но скотч (старый плохой в тот момент только был) к пластиковой пробке клеился плохо. Поэтому вторая версия с чуть измененной пробковой частью была приклеена 502-м клеем к нижней пластине рамы на ее торце. На фото первая версия. Вес пробки меньше грамма.
Крепление антенны приемника Futaba
Апгрейд
Двигатели DJI 2212/920KV заменены на Tiger MT-3506-25 KV 650. Установлены пропеллеры вначале APC 12x3.8 Slow Flyer, затем APC 12x4.5 Multi Rotor. В дальнейшем предполагается использование только Multi Rotor. Два штатных пропадаптера моторов Tiger с правой резьбой PA006 заменены на пропадаптеры PA005 с левой резьбой - гарантия от самоотвинчивания в полете, надежность в приоритете. На адаптеры с левой резьбой ставятся пропеллеры Pusher. Установлены родные ноги DJI. Зимой удобно взлетать со снега и садиться на снег. Ноги хлипкие, но со своей ролью справляются, поскольку коптер садится исключительно мягко. Вес одной ноги 18г. После того как разобрался с настройкой контроля напряжения в Назе, “пищалку” с коптера снял.
Моторы: himodel.com/…/T-Motor_MT3506_650KV_Outrunner_Brush… (цена поднялась, покупал по $56.95)
Пропадаптеры: dronesvision.net/…/1541-tiger-motor-t-motor-m6-ccw…
Пропеллеры:
www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXGNT0
www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXBZMX
www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXDRAE
www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXDRAD
Переходные кольца (пропеллеры MR идут без них, у SF - есть в комплекте): www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXDUES
Ноги: banggood.com/DJI-Landing-Gear-For-F450-Or-F550-RC-…
Разъемы для укороченных проводов мотора: banggood.com/Wholesale-10-Pairs-Gold-Plated-3_5mm-…
Коптер после апгрейда с пропеллерами APC 12x4.5MR
Моторы MT-3506 заметно тяжелей, чем DJI 2212. Официально вес Tiger’ов 72 грамма, на деле с пропадаптерами и 60-сантиметровыми проводами вес мотора около 100г. Провода укоротил до размеров, как у DJI 2212, то есть очень сильно. Вес отрезанных от 4 моторов проводов около 70г.
На лучах рамы F450 предусмотрено по 4 отверстия для крепления моторов, расположенных на диаметрах 16 и 19мм. Отверстия у мотора MT-3506 - на диаметрах 19 и 25мм. Можно крепить мотор двумя винтами. Но можно, используя в качестве кондуктора крест, который имеется в комплекте мотора, просверлить в площадке луча еще пару отверстий. Оригинальная рама это легко позволяет сделать, клоны - нет.
Сверление дополнительных отверстий в мотормаунте через крестовину-кондуктор. Теперь на мотормаунте 3 пары отверстий.
При планировании апгрейда были сомнения относительно использования больших 12-дюймовых пропеллеров на раме 450мм. Геометрически они туда помещаются впритык. Зазор между винтами 15мм. Но поговаривают о возможных проблемах с устойчивостью, управляемостью и т.п. На калькуляторе эти вещи, увы, не просчитываются. Мне не казалось это особенно страшным, поскольку не видел в чем могут быть принципиальные проблемы. При малой длине лучей и малых моментах инерции рамы, реакции по крену и тангажу могут оказаться резче, но можно это будет компенсировать настройкой коэффициентов усиления (gain). На деле ничего такого не потребовалось. Никаких проблем вообще не обнаружилось. Gain’ы не трогал, все по умолчанию. Единственное - 12-дюймовые пропеллеры оставляют мало места на верхней площадке рамы для размещения оборудования. До стойки GPS от пропеллера 20мм, до угла аккумулятора примерно столько же.
Больше того, оказалось, что рама F450 как будто специально под 12-дюймовые пропеллеры сделана. Пространственная конструкция ее лучей такова, что в той части, где они не сплошные, лучи имеют вполне аэродинамичный профиль. И эта аэродинамически-полупрозрачная часть заканчивается как раз там, где проходит край 12-дюймового пропеллера. Нижняя площадка рамы имеет такую форму, что ни одна ее часть не попадает под круг пропеллера. Уголки выступающих площадок как будто специально для этого срезаны.
Тестовые полеты
Производитель (DJI) рекомендует для питания 4S использовать на штатных моторах пропеллеры 8 дюймов, а на 3S - 10 дюймов. Комплект и тех и других входит в набор. У меня предусмотрено питание 4S. Известно, однако, что эффективность пропеллера пропорциональна его диаметру (подробнее об этом планирую написать отдельно). Поэтому 10" было бы интересней. Но судя по всему, DJI2212 на 4S 10 дюймов не потянут - расчет тоже это подтверждает, мощности мотора недостаточно. Однако просто повисеть можно, ничего не случится. В результате полетал (повисел) на моторах DJI с пропеллерами 8 и 10 дюймов. На моторах MT-3506 - на пропеллерах APC 12x3.8SF и APC 12x4.5MR. Результаты оказались совершенно ожидаемые и хорошо совпадающие с расчетными (по калькулятору). Вес конфигураций разный (на 12-дюймовых летал либо с длинными проводами, либо с ногами - лишних грамм 70), поэтому большого увеличения времени с 12-дюймовыми пропеллерами не обнаружилось. Кроме того, из двух имеющихся у меня одинаковых батареек Zippy 3000mAh одна отдает около 2700, а другая около 2300 миллиамперчасов при снижении напряжения до 3.5В на банку под нагрузкой. Полеты выполнялись и с одной батареей и с другой. Понятное дело, что на второй летает меньше. Обработка результатов замеров, сделанных в тестовых полетах, выявила совершенно внятную картину. Большой пропеллер - хорошо. Хороший результат по времени полета (висения) получился с пропеллером DJI 10", но эта конфигурация с питанием 4S бесперспективна, поскольку нагрузить такой коптер не получится - мотор слаб. Да даже и летать (не висеть) стрёмно. Если кто хочет использовать стандартную конфигурацию DJI с родными моторами и пропеллерами, я бы, пожалуй, порекомендовал 3S и пропеллеры 10 дюймов.
Результаты тестовых полетов (висение)
Тестовые полеты выполнялись при полностью заряженной батарее до уменьшения напряжения до 3.5В на банку под нагрузкой по сигнализации Назы. Без нагрузки после этого напряжение на батарее оказывается 3.7В на банку. Поэтому при расчетах принято, что падение напряжения под нагрузкой составляет 0.2В на банку или 0.8 на батарею. Учет падения напряжения под нагрузкой позволяет оценить эффективность собственно ВМГ без учета потерь на внутреннем сопротивлении батареи. Такие цифры больше подходят для сопоставления с данными, полученными на стендах, где измеряется напряжение на ВМГ (на батарее под нагрузкой). Приводятся и данные, где такое падение напряжения не учитывается, тем самым оценивается эффективность силовой установки в целом: ВМГ + батарея.
Порядок расчета таков. По емкости и времени вычисляется средний ток. ЭДС - это напряжение на батарее без нагрузки. По средней ЭДС (среднее арифметическое между значениями до полета и после) и току вычисляется мощность. При расчете, исключающем потери на внутреннем сопротивлении батареи, вместо ЭДС используется среднее напряжение под нагрузкой.
Комментарии модерируются.