Activity
Я не знаю, почему ссылка побилась, но там был простой самый дешманский коллекторный моторчик. И их как правило ставят в сервы.
Бесколлекторные моторы в сервах - не видел, но допускаю что есть такие сервы (и думаю что совсем недешевые).
А Сергей говорил про сенсорные и бессенсорные моторы. Я привел ссылку на сенсорный движок (пока тоже не понимаю, куда его использовать).
И кстати, недавно появились обычные БК моторы с интегрированным регулятором (встроен в тыловую часть мотора). Оправдано ли такое решение - вопрос спорный, но оно есть 😃

Простите что нескладушка, но зато актуально:
Если коптер ты на поле торопился запускать,
И решился ты с наскоку все высоты покорить
Помни, радиомаяк в полете - абсолютно лишний груз,
Ну а коптер сам собою потом найдется как-нибудь.
(забыл маяк поставить…)
Кстати - нашелся 😁. Читать от ссылки и страницу вперед. Прошу прощения за оффтопик…
Тогда может зафанатеть по flikr ?
Яндекс.диск?
Простите что нескладушка, но зато актуально:
Если коптер ты на поле торопился запускать,
И решился ты с наскоку все высоты покорить
Помни, радиомаяк в полете - абсолютно лишний груз,
Ну а коптер сам собою потом найдется как-нибудь.
(забыл маяк поставить…)
Я делаю флипы/роллы с газом.
Сначала пуляю чуть-чуть квадр в небо (то есть делаю ролл как бы на взлете), потом стик до края (например ролл вправо) и одновременно с этим газ делаю низкий - не до нуля, но 25-30 процентов, при законченном перевороте - подхватываю газом и выравниваю стик ролла в ноль.
На двух разных полетных контроллерах контроллерах срабатывает (пробовал на АИОПе-Мегапират и на CC3D-Openpilot), проканает ли на вашем - не знаю.
Меряюсь попугаями. Мое расчетное вертолетное счастье - 7.7 на одном акке 5А 4S. Если поставить два акка - то получается 10,29 попугаев. не летал ещё с двумя акками - только собираюсь, но прищурив один глаз - хотел получить 40 минут полета. По вашей формуле где-то так и выходит - хорошо мой глаз прищуривается 😁
Что касается проверенного конфига (на одном акке 5А 4S), тут почти попало. У меня коптер летал до пищалки где-то 22-24 минуты, по вашей формуле выходит 29 минут. Екальк в свое время мне предрекал 28 минут.
Для грубой оценки - очень даже хорошая формула. А с коптер-калькулятором, на который все любят отсылать - дружба не заладилась. Во-первых, там нет нужных движков (на двух калькуляторах известных мне), а на сайте производителя не всегда имеются полные данные по моторам, чтобы вбить руками. (почему-то особые проблемы возникают с сопротивлением обмоток)
В довесок, демо-версия екалкина похоже теперь не считает по вбитым характеристикам движка…
Так что спасибо за изыскания!
“Ну и в общем в очередной раз разочаровался я в коптере…Самолеты рулят”
Ну это кому как. Я наоборот - с квадриками более-менее договорился, а вот с самолетами - ещё нет. Да, опыта у меня маловато - менее 1,5 лет в RC, но уже личный рекорд установил - ФПВ полет на высоту 1,3 километра (нет, не на 250 коптере). Чем почти горд - почти, потому что хочу и могу подняться на 2. Но пока не сделал.
Так что по мне - так наоборот, коптеры рулят. Но это лишь моё мнение - на вкус и цвет…
Что до конкретной рамы - то её КМК стоит брать только как донора, чтобы переделать всё по-своему.
момент инерции большой
У меня есть мысль, но проверять даже “на соплях” нет времени. Мне думалось разместить ЖК матрицу не “вертикально, напротив морды”, а “горизонтально, от головы - вперед” (типа козырёк) и зеркало под 45 градусов. То есть идет горизонтально матрица, потом ниже френель потом зеркало (контроллеры для матриц бывают с кнопочками “зеркалирование”). Или френель с зеркалом поменять - тут как раз надо экспериментировать (френель можно и изогнуть слегка полукругом)
Что это должно дать: основная масса - матрица с контроллером будет ближе к голове, оттого рычаг на шею будет меньше. По прикидкам - наполовину.
Я не предлагаю сразу кинуться строить по “гениальной задумке”. Я сам проверю эту идею весной или летом 2015 года. А пока - у меня много других дел, мне не до экспериментов со шлемом. Если кто сделает раньше - я буду только рад.
Скажите пожалуйста, а эти сервы у вас не дрожали? У меня с таким же размещением передатчика видео сервы с крыле на элеронах - дрожат прилично. Или вы что-нибудь делали для экранировки?
Скажите пожалуйста, а у вас пропы не раскручиваются? Как закручиваете - на локтайт, протягиваете шилом/отверткой?
Скажите, а руддер трогаете при пилотировании? или только ролл-питч?
на таких лучах получите вибрации, вызванные кручением. Все, кто пробовали “П”-образные профили на луч - отказывались от них. Профиль луча должен быть замкнутым. Вот если бы у вас по нижней поверхности был бы гнутый лист алюминия, припаянный к обоим боковым стенкам - тогда было бы другое дело.
А хитрый профиль боковины КМК вас не спасет. Попробуйте ваш луч на кручение. И сравните усилие на кручение хотя бы с квадратной трубой 12х12х1,5.
Вот и я уже наелся глюками и улетами. Задолбало чинить коптеры - жалко времени. Хочу больше летать и меньше ковыряться. Я поставил прошивку 3.1 и буду теперь летать без автоматики. Только на ручке, только ФПВ. ФС настроил на автопосадку, поставил GPS трекер и маяк Слона.
Все эти лоитеры, симплы и суперсимплы - нормально у меня не работают. Пробовал на двух рамах, на 3 контроллерах, на разных прошивках. В последней раме компассмот довел до 9%. Один фиг симпл путает стороны. Благо я уже научен улетами и крашами, сразу в обычный стаб - и ручками на хауз. Да, место для полетов там фиговенькое (побродил я там с туристическим компасом - ужаснулся), но и на других местах творится то же самое. Или у нас кругом аномалии, или я криворукий такой…
А сайтик мне ваш нравится. Только немного неудобно что-то. Сделайте ссылку на ФАКи покрупнее что ли. Чтобы новичок сразу хотел туда нажать. А первой страницей, пусть будут новости (если вы их будете постоянно обновлять). Кстати, по новостям. Может предусмотреть возможность добавления пользовательской новости?
А! Вот что мне не нравится ещё на сайте. Нет возможности редактировать свои комменты. Написал, нажал кнопочку отправить, прочитал ещё раз…поправить бы… Хоть ограниченный период времени, часа хватит.
“ВНУТРИ этой П-полки приклеен репейником приемник, один ус идет вглубь фюзеляжа, другой вперед - все равно плохо, они на одной прямой, надо положить под углом, но не развернуться просто - емнип в последней посылке заказал антенну 40 см - можно будет протянуть допустим к хвосту”
Я врезал ФРИСКИн приемник в хвостовую балку (снаружи по бокам надо будет две полоски карбона пустить на всякий случай), заменил у него один ус на 30 сантиметровый, с противовесом - протянул его в хвост и горизонтально под РВ приклеил к хвостовой балке. Второй усик (штатный) через пластиковую палочку для ушей протянул под 45 градусов сквозь балку вправо-вверх-перпендикулярно.
В крыло антеннки можно ставить IMHO только когда приемник тоже в крыле (ну или крылья не снимать) - у меня крылья останутся съемными.
Компоновку я в принципе продумал, но ещё не собрал.
Ардупилот к полке приклеивали клеем?
Одноногая курочка ряба… )))
Прикольно вышло. Уличные тесты были?
Добрый день, Виктор!
Скажите пожалуйста, а куда вы планируете размещать ФВП оборудование на вашем Бикслере?
У меня на столе лежит (собирается) Изискай (самолет, похожий на Бикслер и по компоновке и по размерам). Я кручу - верчу оборудование, но так и не придумал, что куда размещать. (Мебиус, GPS, видеопередатчик с лоупасс фильтром и большим клевером, Ардушку, приемник РУ… Башка уже кругом идет!
Еще скажите - на вашем Бикслере как вы поступаете при снятии крыла (GPS модуль…) какие-то коннекторы?
Здравствуйте, у меня другая проблема.
Модули друг друга видят - в МП отражается как параметры/номер прошивки наземного модуля, так и “удаленного”. Но через модуль - не коннектится “no heartbeat received”. Такое ощущение, что сам контроллер не видит модуль.
Сколько видеобрелок весит - 2,5 килограмма?
Офф: АААААА - ФАШИСТЫ!!!
Случайно наткнулся на ваш дневник. Скажите, а при посадке ноги не разъезжаются в стороны? Просто вниз просится ещё одна перекладина, связывающая эти раздельные ноги в единую конструкцию.
Вес вышел хорошим.
Добрый день, Александр.
Я смотрю, вы сделали сборку 4S6P. Скажите, а это самое “6Р” - оно как в эксплуатации? Я всмысле того, что вы же 6 пальчиковых акков заряжаете как один? (а как же тогда проблема перезаряда одной из запаралельленых ячеек) Или все вынимаете и заряжаете как обычные пальчиковые аккумуляторы? Или у вас есть какие-то приспособы, ноу-хау…
Можете показать фото внутренностей вашей сборки?
А можно мне тоже вопрос задать (не провокационный, а от незнания) - вижу плату IMU, прикрученную к раме. Это сделано оттого, что встроенный в плату аксель помер, или это сделано для большей точности? И куда подключена эта плата (какие пины), и как активирована в настройках? (у меня у знакомого приехал дохлый аксель на Ардупилоте, он мается теперь с ним). Ссылка на статью или подробное объяснение желательны.
Да нет никакой войны, и топора тоже не было - зачем Вы так агрессивно все воспринимаете? Спор есть спор…
Я понял Вашу мысль -
Ну вот, теперь это спокойный и аргументированный спор. Мне наоборот агрессия показалась в вашем ответе. Сорри что ошибся.
А я понял вашу мысль. Наверное для меня компактность имеет не такое большое значение, как для вас. И меня не напрягают “лишние” 40 миллиметров, если они дадут дополнительную стабильность. А развесовка навроде вашей - конечно не является неваляшкой. А скорее пригодна более под акрокоптер. Лежит у меня на балконе первый квадрик - ждет переделки под акробатику (очень уж крашеустойчивая рама вышла) - так вот на нем будет развесовка наподобие вашей (акк сверху, масса не размазана по вертикали, а собрана “в кулак”).
Я останусь при своем мнении. ФПВ и съемки - конструкция квадрика САМА должна давать максимум устойчивости.
Игорь - моя критика была именно в поднятой батарее. Что до компактности - она возможна и в варианте “батарея снизу”. Но это - как вы правильно заметили - голословное утвеждение ДО постройки варианта “сушколет, батарея снизу”, или хотя-бы до нарисования чертежей. И ни то, ни другое я сейчас делать не буду. Скажу лишь в общих чертах - если взять нижний этаж вашей рамы, но сделать его не жесткозакрепленным, а задемпфированным - то снизу пристегнуть батарею будет очень даже легко. Попытайтесь освободить своё воображение, сбросить шоры готового варианта и представить то,что я опишу словами.
Нижние пластины к которым крепятся лучи имеют вылеты относительно верхних сперед и назад каждая. На них стоят бочонки вибродемпферов. 2 впереди всей рамы, 2 сзади всей рамы, и по 2 на каждую пластину в середине рамы (4 вцентре, всего 8 штук).
НИЖЕ (скажем на сантиметр) всей рамы идет сплошная пластина, на которую пристегивается снизу батарея, на которую крепится подвес сверху и спереди основной рамы. Через “Г” образные крепежи самая нижняя пластина демпфируется с нижними пластинами основной рамы (где крепятся лучи). Ну и естественно понадобятся ноги, которые крепятся либо к лучам как у вас, либо через отверстия в самом нижнем этаже крепятся к нижним центральным пластинам (к которым крепятся лучи).
Тем самым получаем:
- Заниженный ЦТ. Он будет гораздо ниже, чем в вашем нынешнем варианте. Более низкий ЦТ дает более устойчивый в полете коптер, ему будет менее страшен ветер и контроллеру будет проще стабилизировать в горизонт.
- Б О льшую защищенность от наводок ЭМИ. Под нагрузкой батарея тоже излучает ЭМИ, которые влияют на компас. На вашу раму встанут только контроллеры с выносным компасом и на тот тоже идет влияние от батареи. В варианте, предлагаемом мной - наводок будет меньше даже на полетный контроллер, не говоря уже про выносной компас.
Игорь, предлагаю зарыть топор войны и прекратить эту дискуссию. Обязуюсь больше не ворчать в сторону уже классических “сушколетов”, и держать свои доводы при себе.
Александру Павленко - персональный поклон - его рама действительно заслуживает внимания, но я буду польщен, если он вдумается в мои предложения. (в том что он узнает про мои “наезды” - я не сомневаюсь).
(думаю, дальнейшая полемика будет бессмысленной, на всякий случай попрощаюсь, но от сообщений не отписываюсь)
Короче - Мир, Труд, Первомай! Всем любви, тепла и успехов в начинаниях.
Может - поэтому ваш пятиногий и задирает нос?
Мой пятиногий задирал нос при первой попытке запуска. На выложенном видео этого эффекта уже нет. Ось вращения пятого движка сдвинулась буквально на сантиметр. Выводы о полезности или бесполезности этой схемы ещё не сделаны - нужны продолжительные тесты.
Что касается нашего спора - оставим его. Когда ЭТИМ летом я соберу карбонового - тогда можем вернуться к нашему спору, но уже применимо к моей раме.
Вы попросили критику по раме, я покритиковал. Вы доводы отбросили. Полемика закончена.
(вы несколько раз цитировали мои слова “все вы”, “всем вам” - этого не было)
Достоинств автора рамы я не умаляю, я всего лишь указал на необходимость дальнейшего совершенствования. И термин “сушколет” - не мой. Похоже это уже действительно нарицательное имя.
Успехов вам в постройке вашего квадрика.
Игорь, не переживайте вы так!
Давайте посчитаем. Саму раму в расчет не берем - она и в виде “акк сверху” и в виде “акк снизу” - примерно одно и то же. Вес акка можно взять 400-500 грамм (5А 4S - весит около 500). Считаем по сетапу: 4 движка по 70 грамм, 4 регуля по 40 грамм, контроллер 20 грамм, какое-нибудь питание - грамм 50. Итого - грубо - те же 500 грамм. Получается, рычаг приложения силы - сама рама. И куда будет направлена половина массы - на верхнюю часть рычага или на нижнюю - выбирать конечно вам.
Вместо праведного возмущения подумали бы над замечанием. Да, на ваших фото - аккумулятор ниже ЦТ аппарата. Но конструкция рамы - её концепция - нуждается в изменении.
Летом буду собирать своего карбонового, и тупо копировать раму - не буду. Хотя и планирую собрать нечто похожее, но По результатам сборки размещу свой дневник, там можем подискутировать. Сейчас же просто, вы просили критики - я покритиковал. КМК - контроллеру будет гораздо проще стабилизировать коптеры с батареей внизу.
С праздником!
Нет, вот смотрю я на все эти “сушколеты”, и зреет во мне что-то - и бродит и бурлит…
Скажите пожалуйста - где у вас проходит ось ЦТ в горизонте? По линии пропеллеров - где-то в сантиметре-двух вверх от лучей (зависит от высоты мотора, от пропадаптера).
А где у вас расположен самый тяжелый компонент (аккумулятор)? СВЕРХУ. И у некоторых - существенно выше пропеллеров.
Всем так нравится удерживать неваляшку вверх ногами?
Переделайте уже сушколет, чтобы акки были ниже линии пропеллеров!
Может надо было KV движков задрать? А регули - сейчас есть африканцы - недорогие и быстрые. И даже с цифровой шиной на плате (не умерен что CAN, по-моему I2C)
На буржуйском форуме уже давно эта инфа. www.rcgroups.com/forums/showthread.php?t=1849952
Винты там выпрямляют так - зажимают между двух металлических пластин и греют. Еще где-то на буржуйской сайте продаются unidirectional винты.
Что касается трехи - посмотрите второй пост вот в этой теме rcopen.com/forum/f134/topic361916и rcopen.com/forum/f134/topic361916 ключевое слово для поиска - boomcopter.
Эммм - всмысле музыку? Или проектор?
Если проектор - то где можно полюбопытствовать на ваши результаты?
нет, повторять не стал.
На тот момент был болен другим проектом - хотел сделать полноцветный растровый лазерный проектор (именно растровый). Но сначала не было возможности (упарился с главным многосегментным зеркалом - сам сделать не смог, прислали из Штатов из одной лазерной конторы), потом появилось ЭТО хобби. Так и лежит тот проект позабыт-позаброшен, пылью покрывается…
А ардуинка сейчас - просто как вспомогательный инструмент. Перепрошить например что-нибудь с помощью неё (ЖПС модуль например).
Конечно! Меня бы тут не было сейчас с вами. Играл бы себе в Варфейс, Кваку и пил бы пиво. )))
А вместо этого - квадрики, самолеты, полетные контроллеры, регули…
Эти видяхи сподвигли меня купить себе Ардуинку 1,5 года назад…
Я сделал по-другому.вместо штатной антенны я поставил заглушку из колпачка для шариковой ручки. Выковырянную антенну припаял и приклеил циакрином к родному вч молулю. Получилось очень даже клёво - антенна может вращаться, менять угол и проходит между аппой и ручкой - то есть аппу класть на спину можно спокойно. Теперь на всякую фигню я ставлю стоковые турниговские приемники, на покруче ЛА (квадрик №2 и Изистар) ставлю FRSky. Модуль сменить - дело нескольких секунд.
Майские скоро! Надо срочно всё восстанавливать - побил весь авиапарк - два квадрика, тренер - потолочную Цессну и Изистара. Хотя бы Изика сделать и квадрик хоть один бы…
поднял диспут на пайпалке, поделитесь как это сделать))? у меня посылочка на 450 уже 35 день как бы отправлена емсом в Россию
Проще простого. Открываешь Paypal.ru, там есть “центр разрешения проблем”. Далее кнопка “оспорить операцию”. Там надо будет в списке найти то, что хочешь оспорить. Есть строго регламентируемые сроки. 60 дней дается на всю сделку. В течение первых 45 дней (тут возможно вру) - можно открыть диспут. После открытия диспута дается некоторое время на переговоры между продавцом и покупателем. Но ХК ничего не Палке не пишет - ВООБЩЕ. Через недельку можно переводить дело в претензию. После этого ещё две недели дается на обсуждение (ХК опять плевать хотел), потом должно быть возмещение. В теории. Во время всей этой тяжбы Хоббик будет вам писать письма (напрямую, в обход Пайпал) мол - закройте дело, тогда сможем что-нибудь порешать. НЕ ЗАКРЫВАЙТЕ ДЕЛО - вы его не сможете открыть повторно.
Со дня на день жду возмещения - тоже Хоббик “отправил” EMSом посылку - и ни слуху, ни духу. Еле-еле стрёс с них трек-номер - тот вообще мертвый - никаких движений.
Сейчас они пишут типа “мы уже заказ отменить не можем, ищите его на своей почте или на своей таможне” - а хрена ли толку, когда этот заказ не приполз к нам в стану ещё???
Добрый день. Скажите, а посадка у вашего квадрика - “на пузо”, или есть какие-нибудь маленькие ноги? Мне что-то неохота ставить красивый коптер на глину (беее) пузом.
Вес - вообще песня!
Вызывает только беспокойство крепкость “корытца”. Хочется усилить крепление этого корытца в движку.
А вот вуду для лентяев
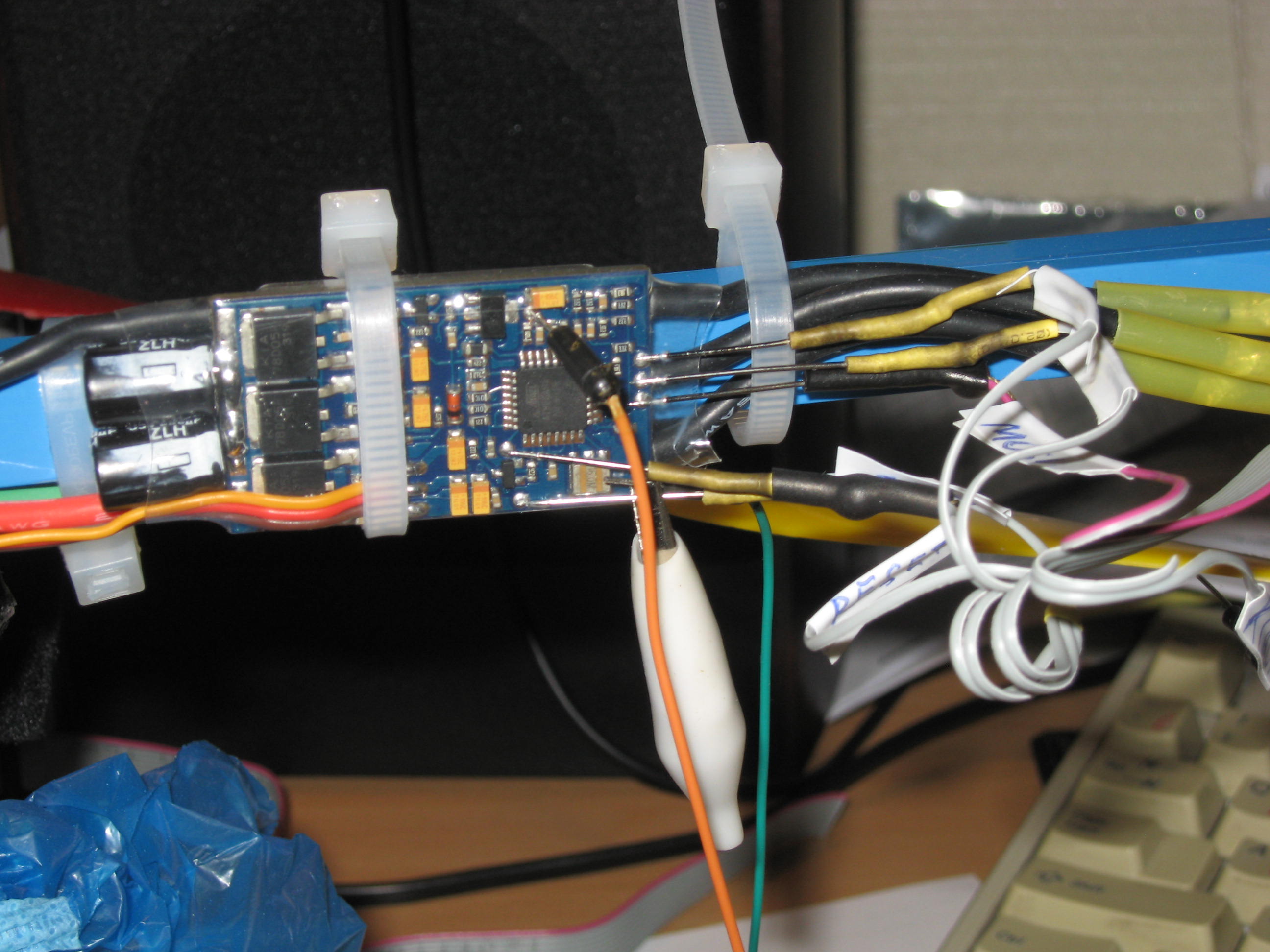
Чтобы было понятно - я взял обычные английские булавки, примотал НИТКАМИ зачищенный конец провода и на термоусадку. И потом шил прямо сквозь термоусадку регулятора.
Как видите, шил прямо на квадрике. Такая вот иглотерапия)))