New entries

Одна из.
В полезности.
В борьбе с вибрацией на двухмоторном носителе, есть определенные успехи. Винты заново отбалансированны и сделана виброразвязка под подвес.
После удачного пролета над рекой Велей в прошлый раз решил, что тема крупных планов не раскрыта.
Решил полетать пониже, но пока страшновато. Вот такое получилось дополнение:
видео удалено
Неделю назад попробовал поснимать на закате, света маловато, глазами все интересно, но как же видит камера фантома Про?
Склеил небольшое видео с цветочками и пролётами…
видео удалено
Увидев в youtube гонки на квадриках, очень захотелось тоже попробовать. Т.к. особо тратиться не хотелось по началу, то попытался собрать что подешевле.
Конфиг получился вот такой.
И разминая мозги.
Несколько лет не делал самолеты и решил воспользоваться вот этим, всем известным, видео.
Все понятно объяснено и думать нужно по минимуму.
В отпуск взял с собой два коптера - один 250-й с камерой Mobius, другой - старый, примерно 200-й, с Horizon HD v3. Полеты на жаре доказали большую выносливость Horizon HD - она нормально снимала, в то время как Mobius уже при 37 градусах зависала, не сохраняя запись. Один раз так зависла, что индикатор не горел, а камера дико грелась, и пришлось ее разобрать и передернуть батарейку. В инструкции, правда, написано, что максимальная температура воздуха для использования Mobius - 47 градусов. При зависании я мерял температуру радиатора и корпуса термометром Turnigy - было около 41 градусов, что приемлимо для LiPo питающей камеру.
Мораль - если летаете летом, не пользуйтесь видеовыходом Mobius для FPV 😉
Впервые с мая 2013г выбрался на соревнования. В Воронеж. Автобусом в Краснодар, потом на машине с Виктором Фрунзе. Сутки в пути. Тяжело, зато масса впечатлений и положительных эмоций. 😎
Планер я облетывал непосредственно перед соревнованиями. С корабля на бал, как говорят. С соответствующим результатом 😛. Пару пионеров облетал и то хорошо.
Полеты в соревновательной запарке выявили и косяки модели. Немного, но есть. Нет, в общем и целом, планер летит очень даже. Старт неплохой, потоки показывает, даже против ветра без загрузки летит.
Самый большой недостаток - это вес. Планера рассчитаны на начинающих и переупрочнены сверх всякой меры. Будем облегчать конструкцию. Самолет должен быть 230-240гр полетного веса. Расчеты показывают, что это вполне достижимо.
Есть проблемы и с жесткостью оперения, особенно на крутку. Ну и на закуску мелочи, вроде крепежа балласта и крышки фюзеляжа.
Совсем не гламурный и без заморочек, но летает, в моем представлении, вполне достойно. Если что - легко ремонтируется. Сорвал резьбу с оси двига - закрепил винт нейлоновыми стяжками - понравилось. Отказался от гаек (здесь пропы 0945).
Берем вот такой монитор(простите за ватермарк, надумал сделать запись, когда все уже распилено подогнано и закрыто):
Очередной “смельчак” с квадрокоптером.
Без коментариев
www.dropbox.com/s/ajryfn4h28qpdkl/zil.ASF?dl=0
Не успел я продать X7, как понял, что я все-таки хочу что-то летающее дальше и дольше, чем бикслер.
Китайцы и почта отработали прямо-таки молниеносно - и вот аппарат у меня.
Сделан на первый взгляд хорошо, в крыльях установлены направляющие в которые входят карбоновые трубки.
В стабилизаторе залиты карбоновые усиления как самого стабилизатора, так и руля высоты.
Ну хотя не “икар” даже, а очень-очень “по мотивам”. После очередного жесткого краха бальзового мотопланера его фюз окончательно на помойку; и хоть я прикупил по случаю новый, пока решил не насиловать природу, а использовать (после небольшого ремонта) крылья в пушере
Вчера попробывал шнягу на воде. Первое испытание в бассейне, показало, что поплавки не герметичны. Набирают воды и в результате винтом по воде. Брызг куча. Прошолся стыки скотчем. Стало лучше. Но не на много. Пошел на пруд. Смотрится она на воде красиво. Поплавки не особо воду черпали. Но винтом по воде шлепала. И антенна была в воде, управления не слушалась. Вот будет время, попробую the 4Q сделать. Давно на нее глаз положил.))) при возможности выложу видео.
Что нового в версии 0.5 MinimOSD X2 (отличия Minim OSD Extra Plane r800)
- синхронизация обновления экрана с видеосигналом - убрано кратковременное искажение символов
- обновление экрана по мере поступления информации (ранее частота была фиксирована 8 Гц)
- новая программа для настройки параметров и загрузки шрифтов для Linux и Windows
- русский вариант прошивки
- предупреждение об отказе электромотора
- индикатор положения камеры (подвеса)
- настройка скорости телеметрии (пока 57600 или 115200)
- подстройка положения OSD по вертикали и горизонтали, чтобы первый/последний символ не обрезался
- исправление многочисленных ошибок (и привнесение новых)
- загрузчик шрифта вновь включен в прошивку, добавлена защита от случайного его срабатывания в процессе загрузки автопилота
- 3-й экран OSD (изменены границы переключения экранов - 1200, 1300, 1400 микросекунд)
Давеча я закончил швейный этап первого экземпляра будущего нового своего продукта - спасательного(запасного) парашюта для моделей. Сей аппарат есть основной компонент будущей спасательной системы для моделей(беспилотников, парапланов/паралетов), который я хочу так сказать замутить для нуждающихся в подобном типе приземления.
Надо сказать опыт пошива парафойлов как водится у меня есть и потому я подошел к проекту этого “изделия №2” с точки зрения взрослых производителей парапланерной техники. Не так давно я купил для себя любимого новую парапланерную запаску на 180кг спасаемого веса(54м2), и решил повторить идею этого парашюта в давно задуманном спасательном изделии.
ТТХ парашюта размера XL:
Площадь, плоская - 7м2
Количество секторов - 13
Тип - щелевая, круглая
Максимальная нагрузка - 8.5кг
Скорость спуска - 4.7м/с при максимальной нагрузке.
Надо сказать скорость спуска в 5м/с - это примерно равноценно падению с высоты 1.5м. В принципе модель такое вытерпеть должна любая(а уж моя железная телега и подавно).
Сегодня утром, несмотря на 8-10 м/c ветер с порывами, решил пролететь над рекой Велей.
Время раннее, 7 утра примерно, от дачи 2 км всего, место открытое и красивое…
Под конец полета, минуты за три до посадки, слетела служба гугля и выбило приложение.
На время перезагрузки программы пришлось включить автопилот.
К сожалению, логов этого полета нет из-за слета программы, пишет что 3 минуты летал.
По телеметрии улетал за пределы 2 км от меня, точно не запомнил. Расстояние покрыл приличное, километров 6-8, наверное…
Всего одна батарейка, а сколько красот!
Кто еще сомневается в третьем фантике? Такой ветер и такое видео…
На втором вижене+ даже и бликозко такое было недоступно.
Видео не монтировал, ускорил в 4 раза.
Наконец-то я его довёл до ума и поднял в небо!
Сборка была очень не простой, но увлекательной! Во время нее приходилось менять комплектующие, дозаказывая у китайцев или в ближайшем лобазе. Три раза удалось увидеть волшебный дым - один раз не выдержал перегруженный BEC, и два раза совершенно загадочные короткие замыкания за которые отдувалась FPV-антенна и карбон в месте ее крепления и к счастью, без последствий.

Однажды по причине короткозамкнутых витков мотора QUANTUM 4125-560 KV при запуске вспыхнул регулятор. Изначально я не понял причину возгорания, но заметил, что мотор стал вращаться заметно туго. Смазка подшипников ситуацию не исправила, но на форуме подсказали, что это первый признак короткозамкнутых витков, хотя первичный осмотр обмоток не выявил признаков замыкания. Ну тем не менее решился на перемотку.
Первым делом столкнулся с проблемой разборки, т.е. отделения статора от обмотки. Как оказалось, что статор видимо сидит на каком-то клее или локтайте и, мало того, там еще ввернут фиксирующий штифт который ввернут микроскопической шестигранной отверткой, отсутствующей у меня. Все попытки подобрать или изготовить самодельный инструмент для его выкручивания были тщетными. Далее была попытка его высверлить, но материал штифта оказался слишком твердым и поломав пару сверел я отказался и от этой затеи.
Следующим шагом было принято решение просто напросто выбить статор вместе с этим штифтом, расчитывая на мягкость алюминиевого металла. Для этой операции из подручных материалов было собрано приспособление из резьбовой шпильки, гайки и шайбы с точным размером по диаметру отверстия. Далее все это нехитрое приспособление было вставлено в мотор, который удерживался в руке и 4-5 ударов молотком по шпильке позволило постепенно вытолкнуть статор даже без предварительного его нагрева, как некоторые практикуют.
Поразмышлял над заголовком.
Размышлизмы тогойт, не впечатляют.
На композитчега я никак не тяну.
Композитчеги, оне ого-го! Полиэфирки да винилэфирки.
Эпоксидка бочками, стеклосфера мешками, ровинг километрами а тряпки рулонами.

Не, не тяну ни разу.


Команды МП что они значат. Вводятся в Mission Planner, далее Software/Adv Parameter List
Полное описание параметров квадрокоптера в Mission Planner можно скачать с моего яндекс диска тут (найдено в интернете, перевод гугловский).
Всем привет!
Обновляюсь до 0.54 😃
В основном ничего революционного, оттачивается юзабилити и надежность. Ну и, конечно, поддержка плюшек новой аппаратной версии.
Аргументированная критика всегда приветствуется!
Результат более 25 полетов в 7дневном круизе + таймлапсы + виды Москвы из моих прошлогодних полетов
Хорошая аппа, говорит человечьим голосом, но динамика у неё унутрях нет, токо неонка. Собрался уже влудить внутрь усил и динамик, когда наткнутся на такую вот замечательную вещь.
www.aliexpress.com/snapshot/6685671278.html?orderI…
При цене $3 и скромных размерах - то что надо. Качество звука весьма китайское, но для голоса это не важно. Громкость достаточная, в шумном месте всё равно нужен наушник. Рекомендую приклеить липучку от кроссовок для фиксации, иначе она вращается вокруг разъема. Хвату совсем не мешает
Всем доброго времени суток!
Решил я установить на свою аппаратуру переключатель полётных режимов, выбрал вот такой. Доставка очень быстрая, продавец порадовал разъяснениями по настройке (далее укажу почему). Так же можно купить на Таобао, например тут. На Алиэкспрессе вроде дороже.
На плате есть выбор напряжения питания, по умолчанию стоит 5V, наша аппаратура работает на 3,3V. Работает и если установлено 5V, а если установить 3,3V не работает USB если не включить питание передатчика.
Переключатель подключил вместо резистора SWB на 6 канал, на приёмнике соответственно переключил 5 и 6 каналы. При включении передатчика и подаче питания на переключатель почему-то не все сигналы выдаются корректно, хотя с переключателя напряжения идут правильные, поэтому приходится прогнать все полетные режимы по очереди (нажать на все кнопки) перед армингом.
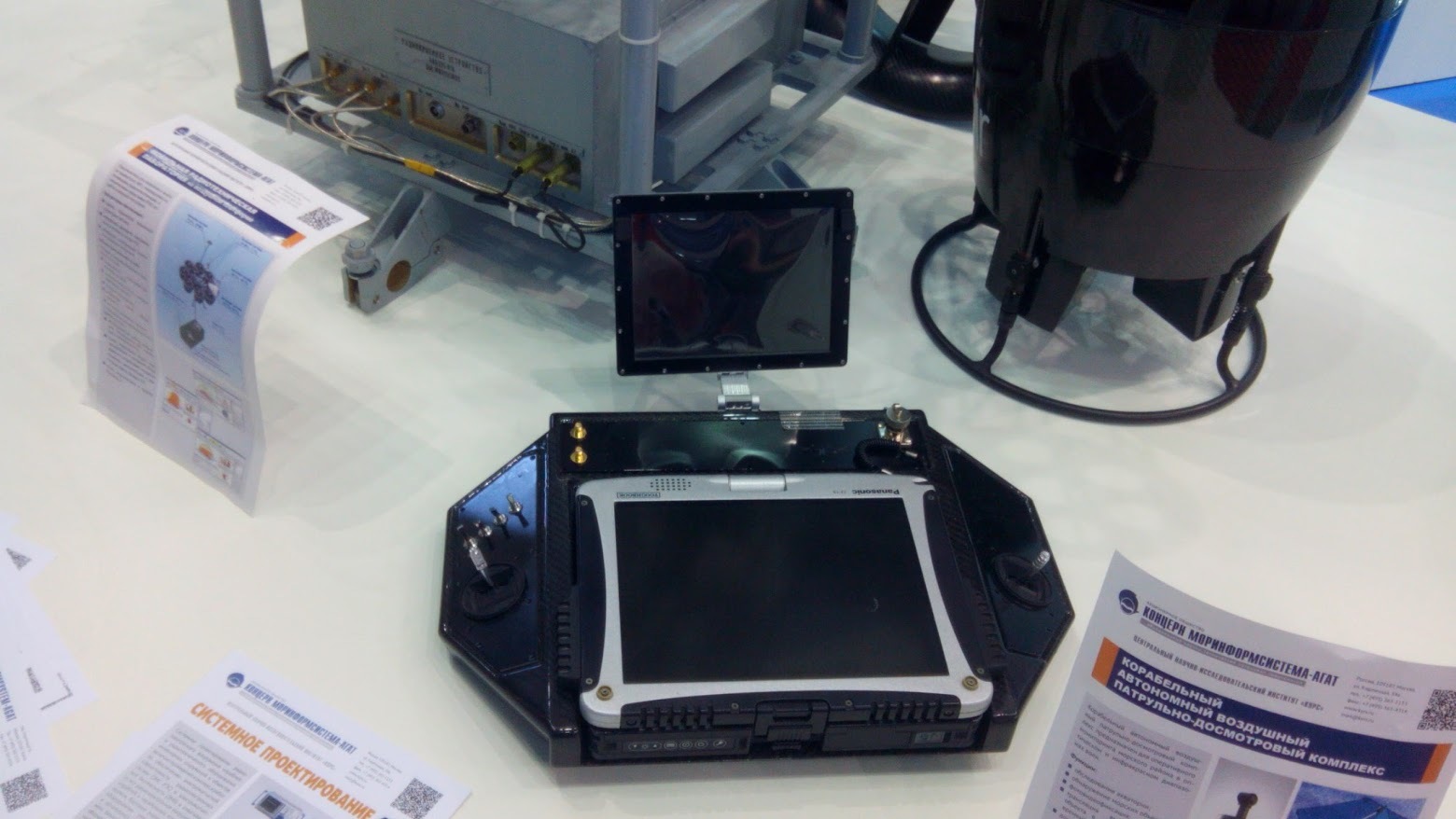
Собственно сама статья тут.
Постить не буду, но особенно порадовало:
“Для создания «всевидящего ока» за беспилотниками необходимо будет установить с десяток станций с локаторами. Предполагается, что они могут появиться в каждом административном округе. По словам проректора по научной работе НИУ МАИ Вячеслава Шевцова, излучение от этих радаров будет полностью безвредным для человека, а зафиксировать летящий аппарат они смогут на расстоянии до 10 км!
После того как станция обнаружит дрон, данные будут поступать в единую городскую диспетчерскую. Затем, уже в случае несанкционированного полёта, сотрудники ФСО сами будут принимать решение – сбивать БПЛА или оштрафовать владельца. На сегодняшний день штраф за нарушение правил использования воздушного пространства составляет от 2,5 до 5 тыс. рублей для физических лиц и 300 тыс. – для юридических.”
Вчера сидел до полуночи, пытался оживить убитые данные на флэшке.
Спасти удалось 8 минут последнего файла. Остальное не поддается пока.
Видео шикарное…
Перевёл на русский памятку по подготовке и полёту на DJI Inspire 1. Хотя вообщем подходит для всех RC моделей.

Оригинал ролика в котором Адам рассказывает о доделках своего Inspire 1 - Adam Savage's Custom Quadcopter Gear
Мой Гоблин 700 пролетел 200 м участок со средней скоростью 214 км/ч на соревнованиях Белые ночи 3D.
Весьма неплохой результат для практически стокового вертолета. Я доволен. Но еще много того, над чем надо поработать. Например улучшить уровень 3D полетов. Или разменять 300 км/ч 😃 Вот это будет достойный ориентир.
Вот ссылка для devo 7e в стоке (прошивка Deviation, с NRF24L01), где model1 - сим хели х6, model2 - v977 (левый тумблер hold, правый idle, огромное спасибо Babay) и model3 - v911 (левый тумблер hold, правый двойные расходы (mode2)). Так же новые настройки в папках (все модели правый холд, левый IDLE, кроме 911го)
cloud.mail.ru/public/GM5E/JXiLzQ2WC
**Моя Записнуха.**
1. Порядок калибровки в Mission Planner
- калибровка аппаратуры, гироскопа, компаса
2. Команды МП что они значат. Вводятся в Mission Planner, далее Software/Adv Parameter List
2.1. Корявый перевод тут
Всем доброго времени суток!!
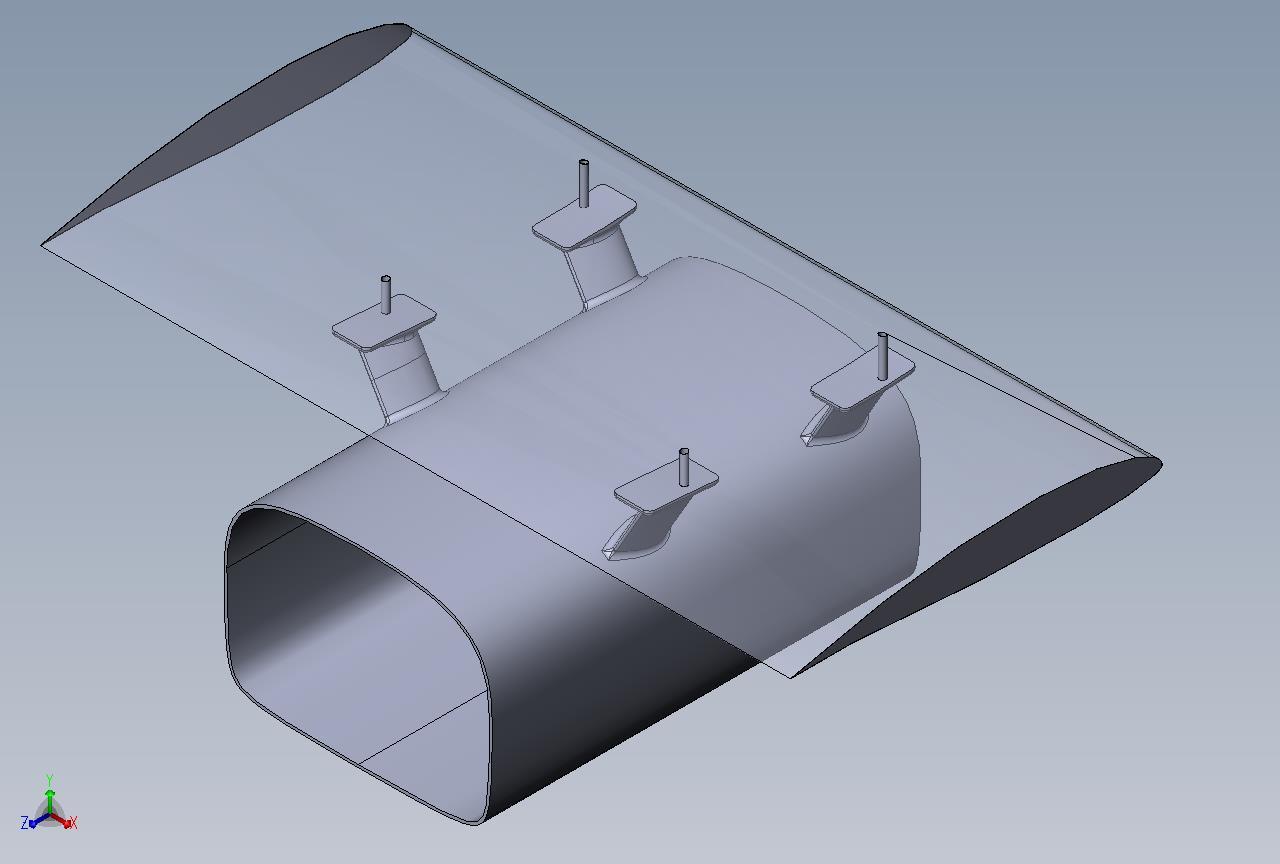
Набрел на такую новость www.redbullflugtag.com/uae/en/ и сразу стало понятно что хочу учавствовать!!!
Проблема в том, что раньше никогда не проектировал и не строил СЛА:). Моделей было простроено множество, и из бальзы, и из потолочки, и из всемозможных пенопласто-пеноплексо-ЕРР, и по композитным технологиям. Вообщем, опыт работы имееться не малый. Неплохо знаю Solidworks и Catia.
Сразу хочу сказать что хочеться сделать не просто прикольное “Что-то”, а с заявкой на хороший результат.
…а, Да совсем забыл рассказать что это такое. Лучше сразу посмотрите
Про пропеллеры записулек и рассказулек набралось на цельный раздел.
Так и обозвал - Пропеллеры.
Складишок по заказу.
Нравитцо, Дэн?

Я купил видеопередатчик на 1500mw для своих коптеров. Как всегда хотелось самый мощный 😃
Однако после установки на коптер я стал наблюдать сильные помехи на видео канале. Искал причину, ставил фильтры – ничего не помогало. Подсказал уважаемый товарищ DiscoMan, за что ему огромное спасибо.
Оказалось, что мощность видеопередатчика глушит бортовую электронику. Располагается всё рядом, наводки создаются сумасшедшие. ОСД перезагружается, помехи будто в трансформаторе летаешь.
Было решено понижать вольтаж для видеопередатчика, чтобы на выходе было что-то около 500mw.
Отдав видеопередатчик знакомому на тестирование узнал ещё одну интересную вещь - lowpass фильтр режет половину мощности видеопередатчика.
Видеопередатчик мне протестировали, и я получил необходимые результаты. Которыми я решил поделиться и с вами, ведь такое оборудование есть не у всех. Видеопередатчик ****тестировался с lowpass фильтром
Итак, картина у нас получилась следующая:
Ура, она летит!


Продолжение предыдущего поста.
Фотки приемника после пайки,
разные ракурсы на Яндекс-фотках: fotki.yandex.ru/users/cashin/album/153278?p=0
После крайнего падения в лес пришлось потратить несколько дней на восстановление самолета.
Разъемы из оранжевых креплений крыльев вытащил. Сделал обычные провода до контроллера.
Всё началось с того что я загорелся снимать видео с воздуха (долго искал кандидатуру по цене и возможностям),как и все новички я считал что только стоить купить квадр ,подвес и остальное ФПВ комплектующее сразу же пойду снимать видео.Оказалось всё не так просто.
Получив коробку с Чирсоном я был восхищён новой игрушкой,в это же день я не рисковал запускать его,прочёл все инструкции и решил запустить на следующий день.
В предыдущей записи в своем дневнике я писал о потере нашего основного испытательного борта. Поиски закончились неудачей.
Но в процессе копания в инете - по форумам, на Авито и в других местах, где найденный самолет может “всплыть”, стала остро ощущаться потребность в некоем едином месте, где в наглядном виде на общей карте можно увидеть все потерянные и найденные борта. Такого сайта я не нашел, поэтому в субботу, 27 июня, сел и сделал такой сайт сам. Надеюсь, он поможет таким как я “потеряшкам”.
Сразу знал что гиблое длеа, и даже авось не помог минус мотор, винт, рама , луч, акум.
Всегда говорил-90% ПАДЕНИЕ ПО ВИНЕ ПИЛОТОВ.