New entries

Этот бренд распространен на внутреннем китайском рынке, в наших краях достаточно редок. Но если сравнивать качество конструктива и упаковки их товара с JJRC, то поначалу JJRC даже проигрывали - сейчас уже почти не придираюсь к качеству упаковки и ее полиграфии.
Знаю такие их модели:
Bo Ming M12 - очень толковый небольшой квадр с инверсным полетом. Функционально - аналог JJRC H22, но у JJRC облупливается краска корпуса при эксплуатации и ударах, а M12 лишен этого. Среди леталок подобного размера - этой мой любимый. Т.е. выбирая среди JJRC H8-mini, H22, H18 - я бы выбрал M12.
Bo Ming M22 - дрон покрупнее, но тихий, динамичный, есть комплектация с камерой, много цветов корпуса. Очень понравился.
Bo Ming M19 - небольшой гексакоптер. Просто гексик, летает, жужит, пульт большой. Нормальный, короче 😃
Частенько на поле бывает трава по мочки, или земля - пыльная пустыня, или каменистый склон горы, или банально грязно на улице - а коптер запускать надо. Тогда полезным будет отточить такой способ запуска: 😁
Ключевые фишки: Dual-GPS (в дроне и пульте) и, как следствие, режим следования за пультом; бесколлекторные моторы; бародатчик; автовзлет/автопосадка; до 18 минут полета (ненагруженный); режим облета точки по кругу.
Непонятки и слабые места: хрупкий пластик (корпус и винты), в каких-то экземплярах может не работать failsave (по нажатию кнопки RTH - работает, а при отключении пульта - у кого-то падает, у кого-то садится в той позиции, где и был, у кого-то работает и возвращается с посадкой).
Попался GPS модуль с отключенным RX, брак это или хитрый замысел производителя - не ясно, но с INAV в таком виде оно не работает. Решил снять видео как это победить, заодно прошелся по подключению и настройке NZ GPS.
В выходные облетал первый свой самолёт, созданный более- менее осознанно, от расчёта до полёта 😃 Очень рад конечно и этим хочется поделиться. Задуман был как носитель FPV ,начало здесь . В результате получился такой самолётик.

Всем добрый день.
Решил сделать небольшой обзор по тому как я решил адаптировать моторы xxd 2212 1000-1400-2000kv под возможность более правильного варианта крепления пропеллеров на квадрокоптерах нежели использование цанг которые как всем известно дают много вибраций, нарушают ось вращения винта в следствии чего пропеллер делает ∞ во время своей работы.
Недавно писал статью про съёмочные дроны; собственно, продолжается эпопея с доведением до ума самодельного агрегата для съёмки. На нонешний момент “коробочные” дроны от DJI и прочих производителей далеко перегнали возможности простых любителей, но по цене у нас до сих пор есть некоторое преимущество (по крайней мере у тех, кто не заходит в хобби с нуля); также есть простор для фантазии и колхозинга; а, главное, сама возможность взять и слепить агрегат из дерьма и палок. Тем, кто занимается исключительно съёмками, наверное, подобные метания не интересны, но любители на то и любители, что заниматься подобной белибердой любят. 😃
Cброс таймера при замене аккума от AlexandrCNH
rcopen.com/forum/f4/topic316896/15052
Подходит для любой прошивки.
Tarot Peeper 710мм
собрал за полдня (ничего лишнего), чтоб посмотреть на раму и ВМГ
моторы - Martin MT4008 KV 330
ESC - Tarot 40A
Props - 17" - 65 складные карбоновые
кнопка отключения акка с индикацией зарядки(как у DJI)
контроллер - ZYX M (v1.04)
GPS - v1.1
Taranis + X8R (SBus)
6S 5000mAh
вес без акка - 1.3 кг, с акком - 2.13 кг
есть удобное штатное место под крепление подвеса T3D III (+GoPro4+TS58200=310gr.) или 10X optical zoom gimbal ZYX-PEEPER (365gr.)
время висения - 30мин.
Сегодня будет не большой обзор рамы Chameleon от именитого производителя Armattan.
Chameleon это заниженная рама для квадрокоптера под 5 дюймовые пропы (есть версия и под 6 дюймов)
Рама заточена больше под фристайл, хотя погонять на ней конечно же тоже можно.
Диагональ рамы 220мм, а форма рамы является сплюснутым иксом, вписанным в прямоугольник примерно 173мм на 136мм.
Нижняя платина выполнена из 4мм карбона, пластина под аккумулятор из 2мм карбона, и пластина под экшен камеру из 1.5мм карбона.
Вес рамы, в том виде в котором вы можете видеть ее на фото, составляет 124.4г
Собрал светодиодный фонарь мощностью 1000W (120,000 люмен) и повесил его на свой октокоптер. Видео с первого теста - не судите строго. Воображение распирает от идей художественного применения фонарика, в выхи будут новые полеты!
Вдоволь натренировавшись в SolidWorks, осуществил давнюю задумку - разработал складную раму квадрика под 16 винты.
Почему “Ослик”? Да потому что суслик, паукан. That’s why. На правах автора.😁
Размер по моторам 680мм.
16" винт (давно валяются моторы SunnySky X4112 400kv).
Ретракты Tarot TL65.
ПК Pixhawk.
Муляж камеры - Sony A6000 с объективом 16мм.
Чертежи пока не выкладываю. Это не окончательный вариант, и “в металле” пока не существует.
Малышок проектировался с расчетом на то, чтобы очень неторопливо грызть в том числе сталюку. Хотя основное - цветнина, конечно.
На видео.
Неторопливо обрабатываю сталь А40Г.
Также за проход снимал и 0.5 мм радиусной фрезой 10 мм с подачей 600. Но шумно, а при снятии 0,4 мм - более гуманно.
Пока перепроверяли архитектуру новых блогов, вылезло еще пара позиций на вылет, про которые забыл сказать в предыдущей записи:
- Название + описание блога
- Личные записи (оказывается, такие есть, и их аж 50 штук)
Ну и для полноты картины повторю предыдущий список:
- Стили
- Кастомные страницы
- Разделение между категориями и тегами
- Всю лабуду из нынешней правой колонки
Картинки с новым интерфейсом можно посмотреть тут github.com/nodeca/nodeca-design/tree/…/pages
Если считаете что я собрался отчекрыжить что-то архиважное, можно попробовать меня отговорить. Но, аргументированно.
Моя сборка H501S/SS: Информация + Видео + Программы + Прошивки
Чертеж данного самолёта был найден на сайте ребят из США Флайтест (Flite Test) и изменён на своё усмотрением его конструктором Александром. Давно хотели собрать с Александром двухмоторник. Распечатка чертежа, моторы, пропы и вдохновление мои, зборка и запуск Александра, аккумулятор взяли у Владимира.
Сборка заняла примерно месяц. Но это в свободное время и с большими перерывами.
Из-за другого профиля крыла было принято решение делать его не сборным. Хотя идея была именно в съёмом крыле и компактности. Моделька получилась достаточно компактная и очень мощьная. Чтобы поднять её в воздух достаточно одного двигателя, а тут их два…
Благодарю ребят из Флайтест за возможность скачать годные чертежи FT Super Bee! 😃
Вот тут: www.flitetest.com/articles/ft-super-bee-build
Были использованы двигатели и винты от моего квадрокоптера. Моторы от DYS BE 1806-2300 kv, пропеллеры 5 дюймов (5х4 Р King Kong), сервы 9 грамм, материал потолочная плитка, подложка под ламинат и цветной канцелярский скотч. Цель постройки была не скорость и манёвренность, а попробовать новое.
Спустя несколько лет полетов на самолетах и владения Mebius Cam еще 1 версии, решил стать ближе к небу, а посему было принято решение сделать себе FPV комплект из того, что в шкафу валается+ минимальные затраты.
Прошерстил форумы, видео на Ютубе и решил, что почему бы не сделать мебиус не только пишушим, но и передающим, заказал шнурок с usb-av+питание и EasyCap, сдул пыль c BOBOVR Z4 Mini и довольно быстро собрал FPV-шлем и передающую часть.
Вспоминаю, как я решался взять ДВС, читал на форуме, что это обслуживание, консервация, мучения при заводке и пр. На самом деле оказалось всё очень просто. На него уходит времени не больше чем на электричку.
На Пайпере не летал целый год, двигатель никак не консервирую, топливу этому уже третий год, двигателю девятый, завёлся после годового простоя за 10 сек, опять вначале были перевороты, освоился только к третьему полёту.

Внезапно, похоже на форуме задачи закончились. Какое-то непривычное ощущение 😃. Еще не допилены странички со статистикой юзеров и странички “новостей” (подписок). Но их я хочу попозже переосмыслить - на реальных данных будет проще проверять, как их сводить воедино.
Еще я все-таки выдурил ник autopilot (большое спасибо владельцу), и пока бот будет выглядеть вот так. Попутно переделали сообщения о предупреждениях (они теперь от автопилота), и добавили в конец ссылку, где смотреть полный список замечаний и задавать по ним вопросы модераторам.
Начинаем пилить блоги, и проверять мою теорию что “всё остальное по аналогии фигачится очень быстро, потому что думать уже не надо”. За блогами по такой же схеме пойдут клубы (который сейчас “социальные группы”). На сладкое барахолка, где все с нуля но надеюсь что не очень сложно (там все выборки страниц на основаны поиске, и каких-то мегафич нет). Ну и потом еще раз пройтись по всему-всему, проверить что пропущено (вроде страниц со статистикой у каждого юзера).
Сегодня вступил в силу очередной закон о БПЛА, но как и в прошлые разы, как его исполнять, и кто будет за это отвечать - власти сами не знают. Зато денег на этой теме уже отмыли на 1 000 000 $!!! “Вы держитесь там…” Подробности по ссылке

При съемке с квадрокоптера, построенного на базе рамы Hobbyking X650F,
обнаружился неприятный момент. Его ноги так и норовили попасть в кадр. В результате каждый раз приходилось в видеоредакторе обрабатывать картинку, что в конечном итоге сказывалось на качестве изображения. В конечном итоге было принято решение установить на него складывающиеся шасси, а именно:
ru.aliexpress.com/item/…/32456828469.html
Нужен был дрон для автоматической съёмки панорам, с уверенным полётом в ветер. При этом всё дожно занимать не много места.
Результат получается, например такой.
28 минут полёта (не висения) на 8A 6S.
Возвращаюсь к авиамоделькам. Годовой отпуск прошел, пора. 😛
Прошедший год занимался станками, фрезеровками, переездами и прочей ерундой. Время на моделизм не было совсем.
Теперь появилось, надеюсь 😃
А не страшно так летать за объектами по миссии когда связи с пультом нет ? Спутники потеряет и привет, ну или еще какая нештатная ситуация. А вообще функция действительно интересная. Можно ли просчитать при создании миссии на сколько хватит аккума при условии штиля ?
Пробую делать переворты и зависания вниз, а также полеты задом в инверте.
Наших парней поддерживаем, там Вова ‘RainFPV’ Мещеряков, Саня ‘Малой’ Сорокин и Вова ‘Дубайский’ Иванов
Все последние новости дрон рейсинга вот тут vk.com/wall-115688959_1797
Периодически задается вопрос как армировать акки, и к чему это приведет, какая выгода от этого.
Процедура не увеличит емкость акка, какого-то реального улучшения сразу заметить не удастся, заметно будет если раньше какая-то банка просаживалась больше других то после арминга просадка или полностью уйдет а скорее всего уменьшится, улучшится токоотдача акк из-за уплотнения хим. элементов, уменьшится скорость деградации акку, но не ожидайте что это вернет акку новую жизнь. Такую процедуру лучше делать на новых акках.
Вот, что нам нужно.
Начинаю свой дневник.
На досуге начал осваивать SolidWorks. В качестве тренировки начертил свою уже летавшую разработку. Первоначально чертежи были разработаны в Компасе. Некоторые детали были импортированы из Компаса. Некоторые созданы в Солиде с нуля. Моторамы и шасси перепроектировал, и на представленных чертежах оно отличается от летавшего экземпляра.
Представлены два варианта: с “обычным” шасси и со складным механизмом Tarot TL65 (смотрите в архиве).
Идеи для разработки бесстыже подсмотрены на данном форуме.
Приветствую всех коптеростроителей и любителей!
Сейчас я вам попытаюсь донести информацию о том, как вывести информацию о качестве RSSI в MinimOSD, с последующей передачей значения качества сигнала в видеолинк.
Видео выкладывать не стал, так как слишком большой размер получился.
Текст будет объемным! Запасайтесь терпением и попкорном!
ВНИМАНИЕ!
Такая модификация требует навык пользования паяльником!
Неправильная установка\короткое замыкание могут вывести из строя ваш полетный контроллер DEVO-M, MinimOSD и другие компоненты коптера!
Делайте на свой страх и риск!
Привет всем!
Создал небольшое, но полезное видео о прошивке нашей “ПРОшки”.
К записи такого видеоурока меня подтолкнули немногочисленные (но имеющие место быть!) вопросы пользователей нашего форума RCDesign.
Ссылки на файлы, необходимые для прошивки и установки необходимых настроек, находятся в описании под видео на youtube.
Если возникнут вопросы - милости прошу в ЛС, или оставляйте комментарии под видео.
Пестня хрипела.
О то-ж, наступить на горло, эт уметь нужно …
Два дня выдержки после закладки при температуре 25 (наконец-то кондей в мастерской поставил), и пестне, да на горло.
Нефик вскрывать. В печку. Еще на сутки.
Конечно не терпится позырить, что там да как там. Но если крутанет, то мне с этим и летать. Не, пусть полежит.
О чем речь-то?
Да как обычно, о главном.
Летать в мертвяк я не люблю.
Причин тому есть.
Всем привет! Хочу представить свою новую модель на тему перспективных истребителей. Долго мучился вокруг её облёта и всё-таки оно совершилось)))

Долго не было времени и погоды для проведения испытаний. Также чуть более, чем я ожидал, надеясь на размер модели и её колёс, столкнулся с проблемой ВПП. Тем не менее, после пары выездов на полосу и серии скоростных пробежек с подлётами над ВПП, Архонт успешно совершил свой первый полёт. Произошло это вчера, 24.06.2017)))
Собственно фотографии изделия в исходном виде и на модели:
Погоня вдвоем от задиристых песиков в Парке Акведук. То один то другой коптер периодически перехватывал инициативу погони и внимание собак, и те вдвоем гонялись за ним по кустам и лужайкам. Но почему-то не разделялись для преследования обоих единовременно.
Пришлось сесть до того, как они устали, а мне, как севшему первым, к тому же понадобилось отгонять их от второго коптера во время посадки.
Удивительно, насколько хватает батареек в этих животных! Коптерам такое и не снилось. 😒
Я уже 9 лет снимаю видео с воздуха, 6 из них с коптеров, за это время снял много всего интересного и красивого: высадки людей на горных вершинах, комбайны в полях, закаты, рассветы, отражения в озерах, облака, военные учения, маяки, корабли, экстрим, архитектура, походы, яхты, дальние экспедиции, ледники, концерты, даже голую девушку на горе, и т.д., перечислять очень долго, всего и не помню. Осталось совсем немного, чего не снимал, и один из пунктов был про воздушные шары. И вот вечером раздаётся звонок, - будет полет над горами на рассвете. Это лучшая картинка, которую можно представить, и она наконец сбылась:
Вот и подходит к завершению проект. Хотелось конечно быстрее, но постоянные выезды на соревнования и тренировки совсем не оставляют времени для творчества.
Испытания моего детища на цифровом осциллографе показали очень обнадеживающий результат. Сигнал выдаваемый передатчиком, проходя всю цепочку эфир-приемник-лимитер на выходе лимитера отличается от оригинала на 1-2 мкс. Считаю очень неплохо.
Согласно официальных правил пришлось постепенно переделывать лимитер в логгер. Теперь данные полета сохраняются во внутренней энергонезависимой памяти. Можно всегда получить доступ к данным крайнего полета.
И самое интересное напоследок. Добавил в конструкцию связь по Bluetooth. Теперь нет необходимости даже подходить к модели. Вынул из широких штанин 😃)) большую мобилу, тыкнул пару раз по экрану и вуаля. Все параметры полета на твоем экране.
Выбрал нервюры для центральной части крыла без сужений профиль MH 64 хорда 250мм.
Профиль для стаб.поверхностей NACA0009 с сужением хорды от 250 до 100мм.
Центральная часть крыла будет с одним лонжероном коробчатого вида, две сосновые рейки 10х4 между нервюрами будут вклеены полоски бальзы 2мм.
Лобик пока под вопросом как делать, выбираю из вариантов:
- Увеличить частоту нервюр через каждые 25мм до лонжерона.
- Заполнить пенопластом и зашкурить под профиль до лонжерона.
- Зашить бальзой 1мм до лонжерона.
Набросал в SketchUp центральное крыло + шайбы + схематично стаб.поверхности пока без элевонов. Можно полюбоваться в 3D 3D эскиз
Первая запись в дневнике.
Есть задумка сделать летающее крыло с 2х осевым подвесом. С нагрузкой на крыло 40г/дм2 из бальзы, размах выходит за 2,25м удлинение крыла 10.5 и вес 2000г (скорее всего будет тяжелее).
Полезная нагрузка выходит уже 1250г.
Двигатель 35-36 1400kv,винт 10x5 или 9x6 180
Регулятор 60A 74
Сервы 2шт MG996R, тяги, кабанчики 150
FPV перед+OSD+GPS+провода+антенна 102
FPV камера 1 курсовая 44
Камера 2 в подвесe Runcam2 90
Подвес 2х осевой 210
Питание двигателя 2200 40С 200
Питание FPV 1450 25С 100
Питание подвеса 1450 25С 100
Если кого интересуют радиоуправляемые метательные планера F3K.
17-го июня (в ближайшую субботу) пройдут соревнования в Дубне!
rcopen.com/forum/f37/topic491590/54
Вот положение…
f3k.su/…/Положение-Кубок-СУ-3-этап-Дубна.pdf
А вот форма регистрации…
docs.google.com/forms/d/e/…/viewform
Народ начнёт подтягиваться на поле с пятницы и часов с трёх дня можно будет подъехать 7а поле, пообщатьсяь с пилотами поглазеть позадавать вопросы, а может быть даже попробовать порулить (если есть мало- мальские навыки управления RC моделью. Во время соревнований, это не получится…
А вот и зарегистрировавшиеся пилоты…
docs.google.com/spreadsheets/d/…/pubhtml
Как выглядят эти соревнования можно посмотреть на замечательном видео от Сергея Семерикова…
дотянулся до звёзд…
Привествую всех любителей строительства мультикоптеров!
Продолжаю тему строительства компактного и функционального квадрика. За последнее время нарисовал и пильнул центральную часть:
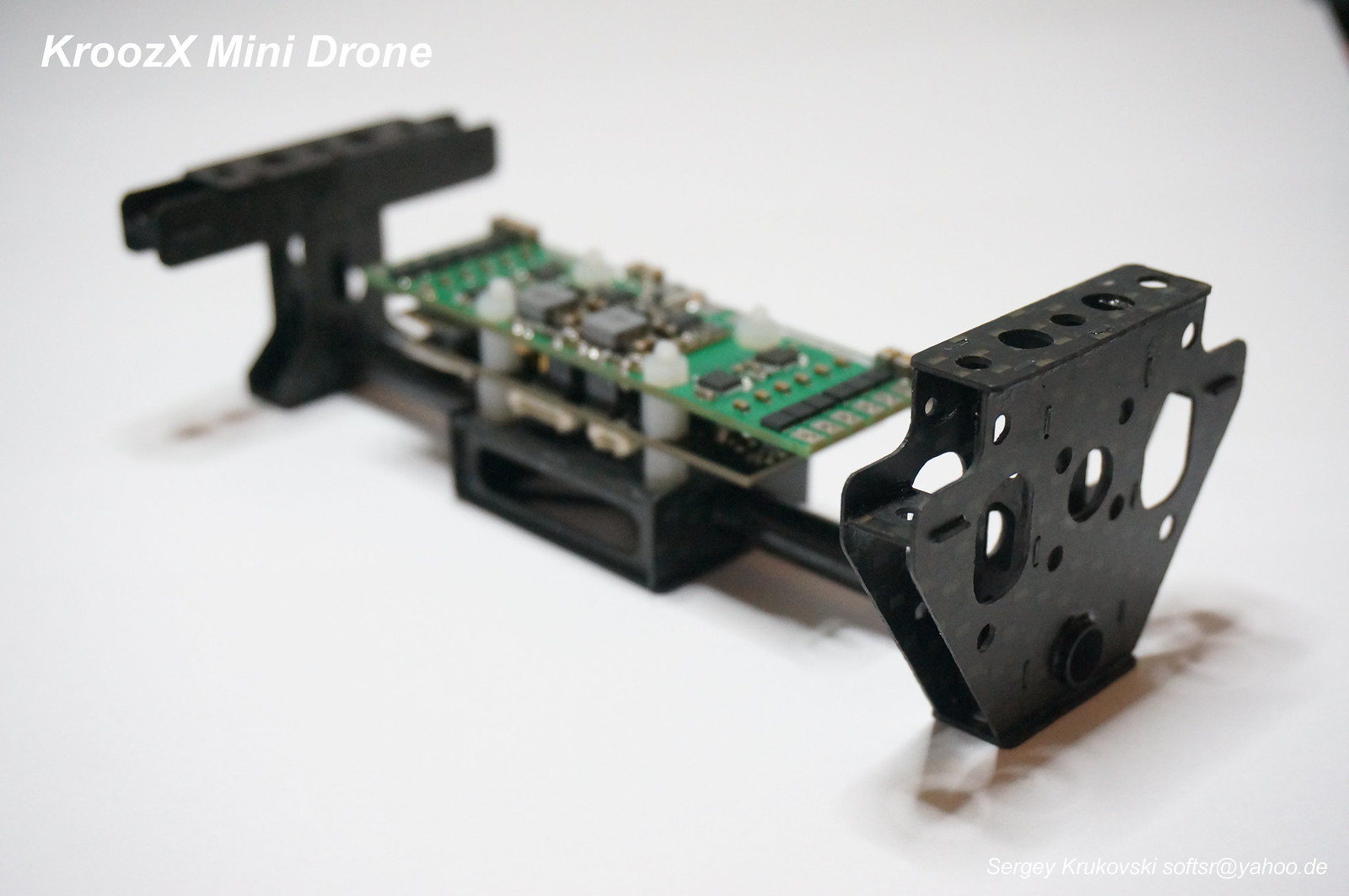
На эту центральную часть, или тушку, будет крепиться почти все навесное оборудование. На фото показано крепление моего KroozX полетника.
Парк Коломенское, 10.06.2017.
Два коптера (Мавик и Фантом) летают и маневрируют над людьми (на высотах от 3 до 30 метров)!
Абсент, июнь 2016г.
