Activity



Собрал еще один RX80.
Запасные части от вертолета HiSky HCP60, которые я обычно использовал для сборки RX80, становится все сложнее и сложнее найти в продаже. Поэтому, в этот раз, пришлось использовать некоторый детали от вертолета Blade Nano CP S. В данной случае, это были лопасти, а также металлические цапфы и хаб от Lynx. В остальном сборка осталась без изменений.
Собственно, хочу рассказать немного подробнее про запчасти от Blade Nano CP S и как они работают на RX80.

Хочу начать с положительных моментов.
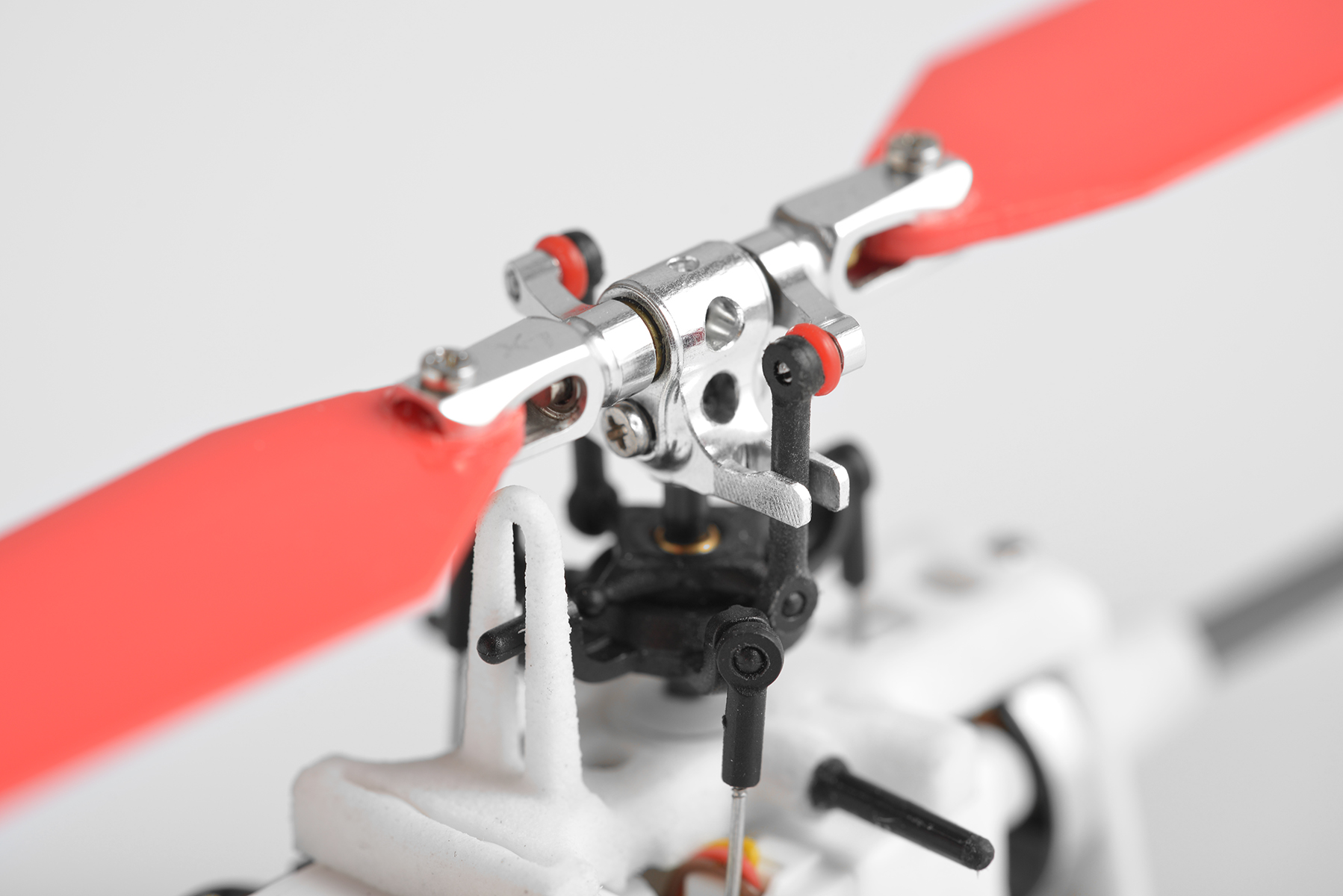
К качеству запчастей у меня претензий нет, металлические детали от Lynx сделаны довольно хорошо. Цапфы и хаб очень миниатюрные и на маленьком вертолете смотрятся очень красиво и гармонично.
Алюминиевый хаб крепится к основному валу при помощи двух болтиков, которые упираются в пазы на валу. Решение очень хорошее. Для крепления хаба не приходится сверлить крепежное отверстие в основном валу. Единственный момент, который хотелось бы улучшить - это длинна крепежных болтов. Хотелось бы видеть боле короткие болтики.
Хаб сделан под 1мм межлопастной вал. По началу я скептически отнесся к этому моменту. Вал мало того, что тонкий так он еще и значительно длиннее вала, который используется в механике HCP60. На самом деле межлопастной вал хоть и тонкий, всего 1мм в диаметре, но выполнен из очень прочной стали, и по прочности даже лучше “пластилиновых” валов от HiSky.
Благодаря использованию 1мм межлопастного вала, и лопастей с тонким комелем, цапфы получились очень миниатюрные. В них используются очень маленькие подшипники 1*3*1 мм.
Межлопастной вал, из-за своего малого диаметра, выполнен по принципу болт-гайка. Конструкция необычная, но работает хорошо. Единственный нюанс заключается в необходимости использовать специальные ключи при сборке. Но зато конструкция позволяет регулировать степень зажатия демпферов.
Еще из особенностей запчастей от Blade могу отметить немного другой коэффициент передачи. Цапфы от Nano CP S(X) имеют боле длинный рычаги, а соответственно чуть меньший коэффициент передачи. Это повлияло на общий и циклический шаг лопастей. Но так как общий шаг лопастей может регулироваться полетным контроллером в широком диапазоне, изменение коэффициента передачи никак не повлияло на величину общего шага. А вот циклический шаг слегка уменьшился и даже максимальных расходов совсем чуть-чуть не хватает чтобы довести его до желаемого мне уровня. Но это субъективная оценка и для многих пилотов имеющийся скорости циклического шага будет достаточно.
Из минусов этих красивых алюминиевых деталей конечно самое очевидное это вес. Он не на много больше чем у пластиковых частей от HiSky, но в таком размере каждый грамм на счету.
Больше всего меня разочаровали лопасти Blade.
Казалось бы, они шире чем лопасти от HiSky и должны работать лучше, но по факту получилось наоборот.
Как я говорил лопасти имеют боле тонкий комель чем лопасти от HCP60, поэтому с цапфами от Blade использовать лопасти от HiSky не получится. Но по мимо тонкого комеля, сами лопасти также имеют более тонкий профиль, а соответственно меньшую тягу.
Кроме того, лопасти HiSky HCP60, в отличии от лопастей Blade, имеют необычный каплеобразный профиль, и я думаю, это также добавляет им эффективности.
Также мне пришлось укоротить их размер до 80 мм чтобы они соответствовали размерам вертолета.
Линки от HiSky HCP60 чуть больше по диаметру чем линки от Blade, поэтому они не вмещаются в направляющие хаба.
Я решил эту проблему слегка обточив линки от HCP60, уменьшив их диаметр.
Не смотря на все нюансы вертолет собрался и улетел в Сингапур.
Надеюсь он будет радовать нового владельца.
Это продолжение предыдущих частей саги, о доработке очков Fat Shark HD3
Первая часть rcopen.com/blogs/198531/23374
Второй части статьи rcopen.com/blogs/198531/23375
Третья часть rcopen.com/blogs/198531/23457
В этой части я хочу рассказать о глобальных изменениях в питании приемника, модернизации батарейного отсека, переносе гнезда общего питания очков, а также, о не удавшихся модификациях звукового оповещения о низком заряде аккумулятора.

Начнем с модернизации аккумуляторного блока.
В прошлой части я перенес аккумулятор очков на заднюю часть головы. Для переноса аккумуляторного блока назад я сделал специальный держатель.
Данная конструкция мне понравилось, но как говорится нет предела совершенства, и я решил, что держатель — это хорошо, но если совместить держатель с задней крышкой аккумуляторного блока, то будет еще лучше! И вот что у меня получилось.



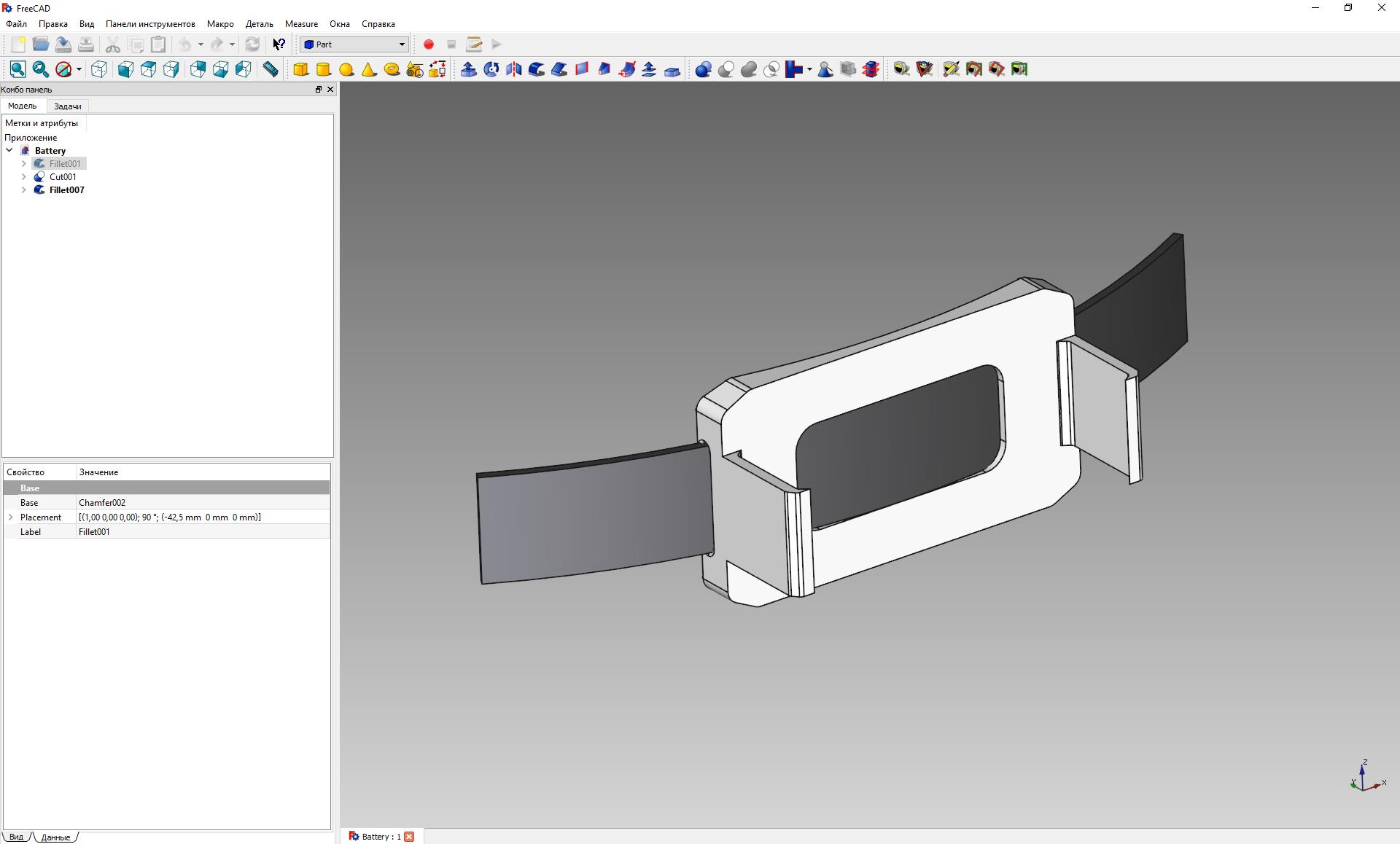
Модель крышки я создал в уже привычном мне редакторе FreeCAD
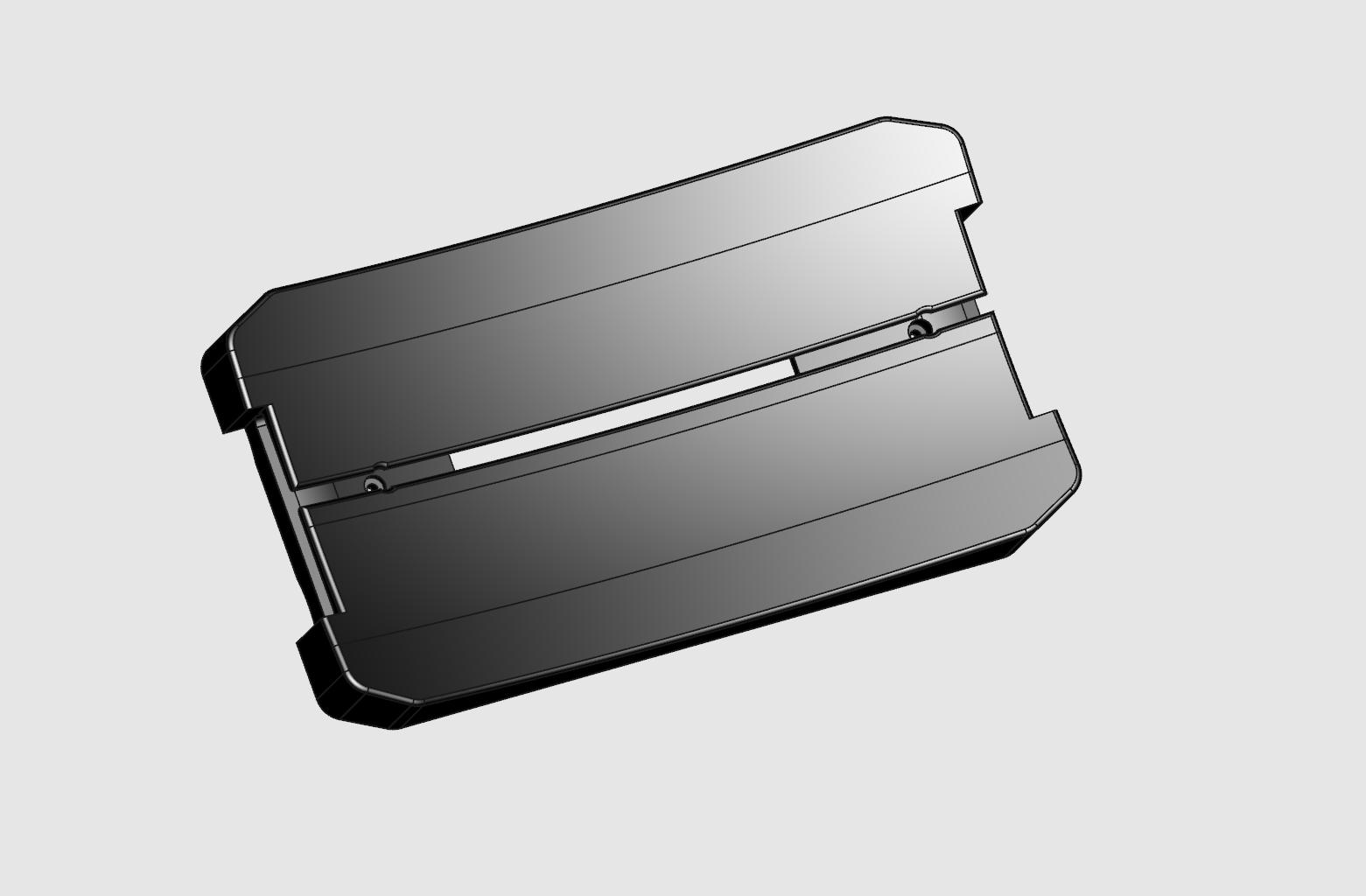
Крышку я распечатал из черного ABS пластика, на FDM принтере. После, механически обработал крышку, при помощи надфилей и мелкой наждачной бумаги.
Как и в прошлый раз, на внутреннюю поверхность крышки я наклеил мягкий двусторонний скотч, а затем снял со скотча наружный клеящий слой, для того, чтобы внутренняя поверхность крышки, которая прилегает к голове, была не такой твердой и не такой скользкой.
В данной крышки я уменьшил радиус углубления под голову, по сравнению с предыдущим держателем, а также придал углублению округлость и по вертикальной оси. Это повысило степень прилегания крышки к голове и удобство использования очков.
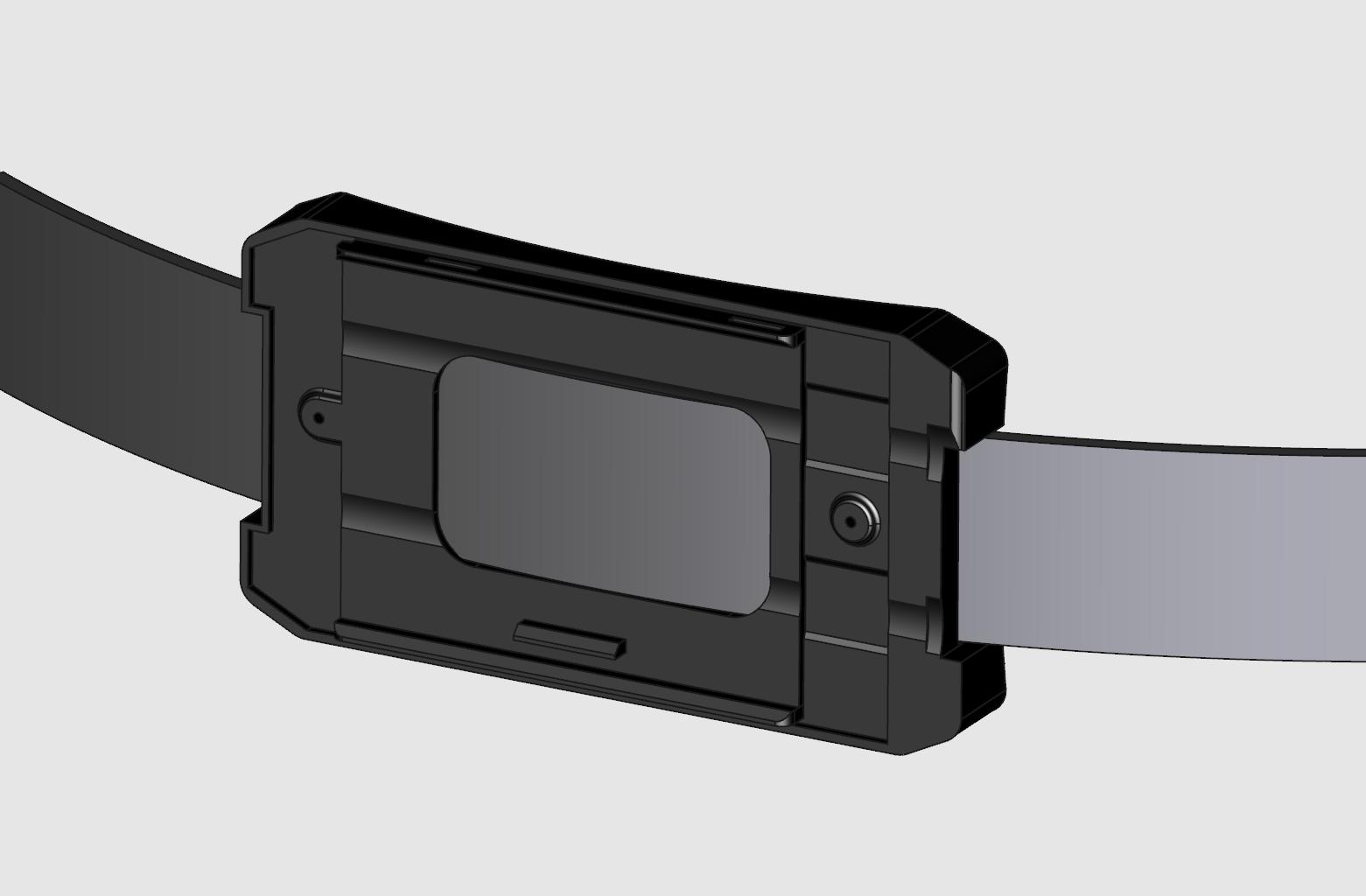
Новая крышка крепится к корпусу блока в тех же местах где и родная крышка. Два центральных винта и боковые защелки достаточно жестко фиксируют модернизированную крышку на корпусе аккумуляторного блока.
Изначально я не планировал делать боковые защелки, но в процессе сборки понял, что боковые защелки необходимы для придания жесткости всему блоку.
Поэтому боковые защелки к своей крышки я добавил уже после ее распечатки. Сделал я их из полосок черного ABS пластика. В самой крышки я вырезал углубления, в которые и вклеил боковые защелки. По мимо боковых защелок я также сделал упор для платы. Все получилось очень прочно, не хуже, чем у родной крышки.
3D модель крышки я также доработал, добавил в нее защелки и упор. Они распечатываются отдельными деталями и также могут быть вклеены в корпус крышки.
Все части для распечатки данной крышки можно найти по следующим ссылкам.
Крышка yadi.sk/d/oRQO-a-Pk5wJzA
Упор для платы yadi.sk/d/E67sscV_sFUv1g
Боковые защелки yadi.sk/d/s9i_HbIq1L1KKA, yadi.sk/d/LvA57PEIXozLZg
С новой крышкой аккумуляторный отсек стал выглядеть еще опрятнее, и стал занимать чуть меньше места в кофре для очков, ну очки стали седеть на голове еще удобнее.
После модернизации аккумуляторного отсека я решил перенести гнездо питания очков.
Торчащей сбоку штекер питания давно не давал мне покоя, но я все не решался сделать с ним что-либо.
Больше всего меня раздражало необходимость доставать штекер питания из корпуса очков перед тем как сложить их в кофр для хранения или транспортировки.
И вот однажды я все-таки решился на кардинальные меры)



Образовавшееся отверстие, на лицевой части очков, на месте старого разъема, я закрыл вставкой из белого ABS пластика. Получилось не совсем как хотелось, пластик немного отличается по оттенку, но все же не все так плохо.
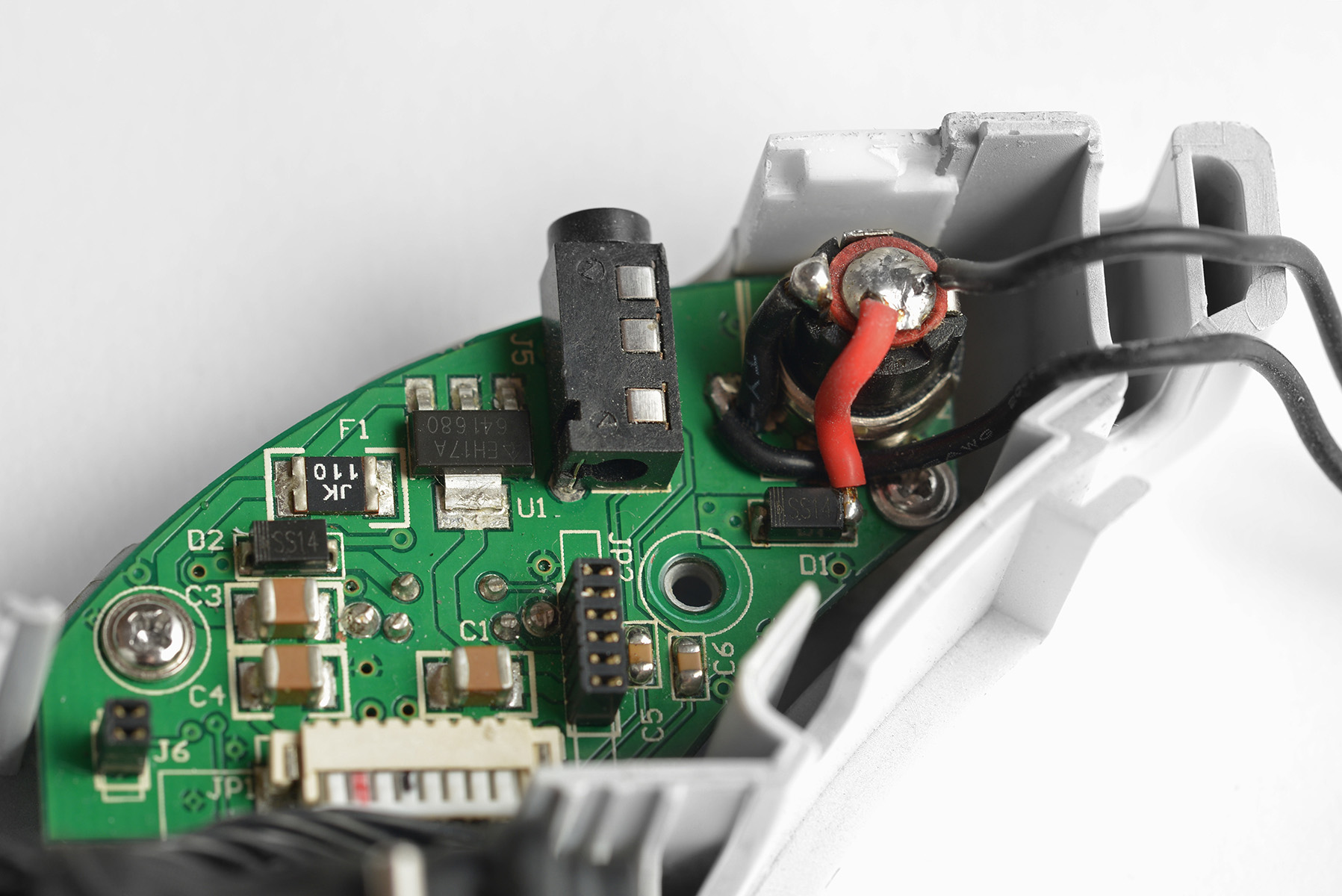
Выпаяв родное пластиковое гнездо, я установил на плату очков новое гнездо, направленное вниз. Для этого мне пришлось варварским способом просверлить в плате огромное отверстие, в которое и устанавливается гнездо. Так же понадобилось немного подрезать плюсовую дорожку, а плюсовой провод подпаять непосредственно к диоду D1.

После этого, в нижней части корпуса очков я прорезал отверстия для штекера питания. Также я установил дополнительную опору крепления для платы, к которой плата прикручивается небольшим саморезом.
После данной модификации, очки можно положить в кофр не отключая штекер питания от очков. Ну и визуально очки смотря гораздо лучше без торчащего спереди черного штекера.
Ну и самая важная, и в тоже время самая простая в реализации, это модификация цепи питания приемника.
Как известно, очки Fat Shark HD3 имеют серьезные проблемы с питанием приемника видеосигнала.
Проблема на столько серьезная, что некоторые приемники не могут раскрыть весь свой функционал, при подключении к данным очкам.
В моем случае, при использовании Realacc RX5808 PRO PLUS, низкое питание приемника не позволяет ему нормально передавать звук.
Но звук — это не столь критично.
Другие приемники, такие как RapidFIRE от ImmersionRC или Clearview вообще не в состоянии реализовать весь свой потенциал, при низком напряжении питании.
И данные производители вынуждены выпускать дополнительные переходники, для питания этих модулей, из другой точки в цепи питания очков.
clearviewfpv.com/product/cvg-aux-power-board/ intofpv.com/t-modifying-fatshark-goggles-to-suppor…
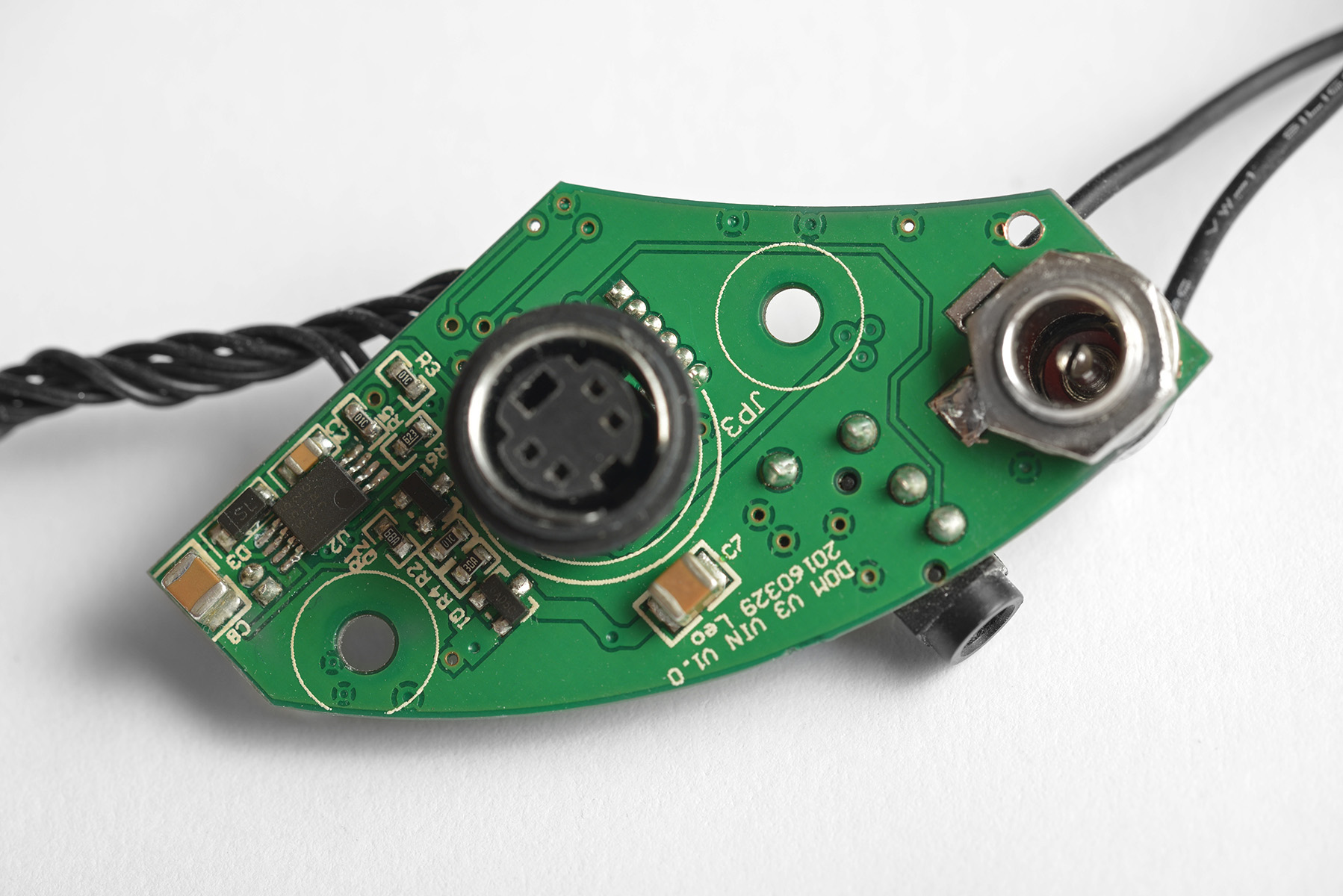
На сколько все плохо с питанием приемника, у данных очков, можно оценить по следующей картинке.
Электроника очков состоит из трех основных плат. Каждая плата имеет свой ВЕС (понижающий преобразователь напряжения)
То есть питание от аккумулятора подается на каждую их трех плат, и понижается до необходимого уровня уже непосредственно на самой плате.
Схема замечательная, но как мы видим у Fat Shark HD3, эта, казалось бы, отличная схема, не работает! Причем она не просто не работает, напомню, что она не работает за ваши кровные 400$!!!
Я решил разобраться в чем же дело, что не так с питанием?
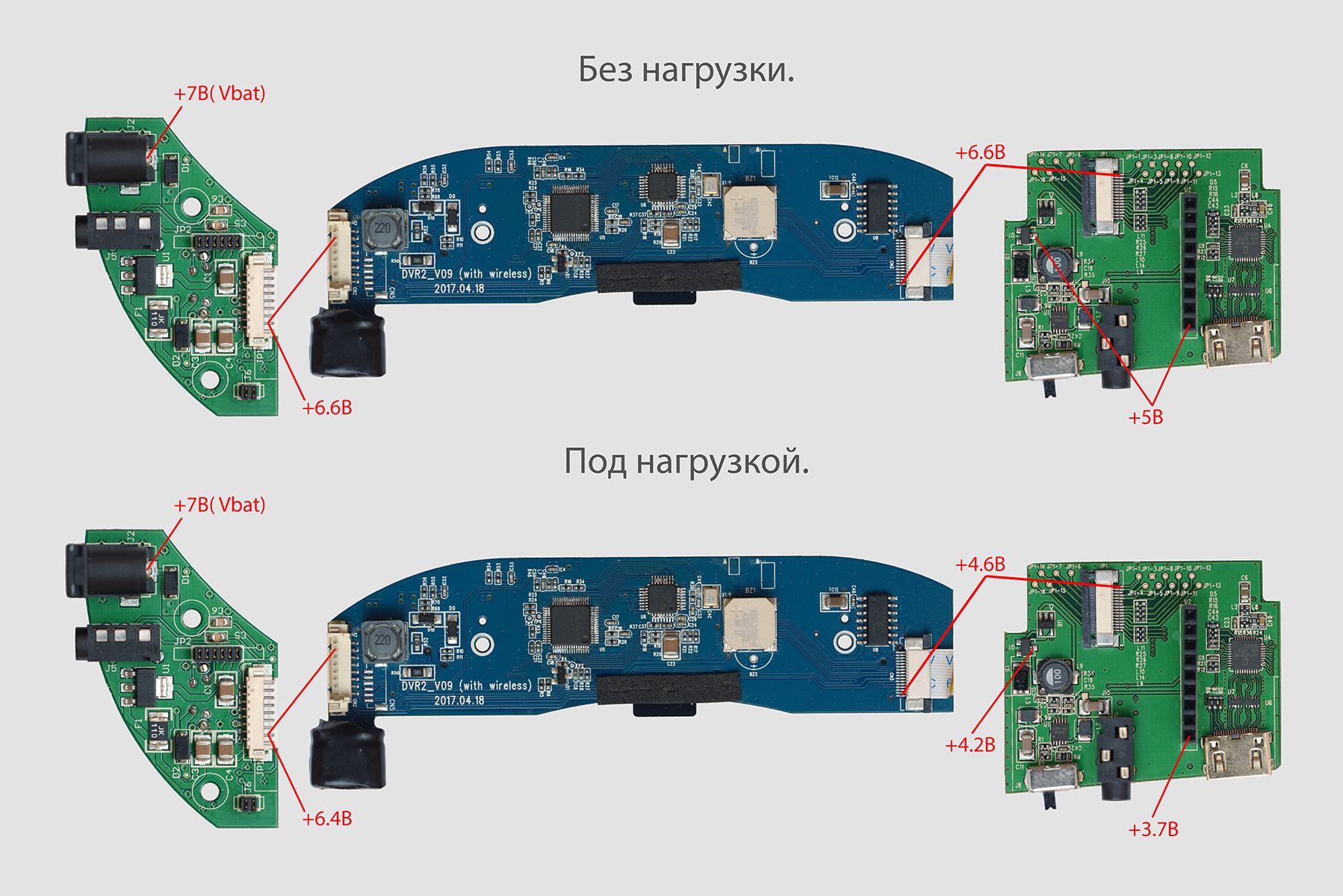
Начал измерять. Как можно видеть, на картинке видно, что первое падение питающего напряжения происходит уже практически сразу после того как оно попадает на первую плату. Это падения около 0,5В, после диода D1. Это не смертельно и если бы дальше все было бы хорошо, то приемник получал бы необходимые ему 5 вольт.
Но идем дальше. Видим, что из поданных 7 вольт, на вторую плату, под нагрузкой попадает уже 6.4 вольта. Но вторая плата нас мало интересует, так как питание приемника реализовано на третьей плате, на которую под нагрузкой вместо 6,4 вольт попадает почему-то 4,6 вольта!!! куда девается 1.8В?!!!
То есть мы уже имеем питающее напряжение на третьей плате гораздо меньше чем 5 вольт, необходимых для нормальной работы приемника. Но и это еще не все!
На силовом транзисторе напряжение падает до 4.2 вольта, а непосредственно на питающем приемник контакте, напряжение падает до 3.7В
Вместо 5 вольт, по факту мы имеем 3.7 вольт для питания приемника!
Частично решить проблему с питанием приемника мне помогло это видео Joshua Bardwell
Следуя инструкциям, я соединил перемычкой из олова контакты индуктивности L1.
Эта незначительно повысило питающее напряжение на приемнике, но оно все равно было далеко не 5 вольт.
Поэтому я решил искать проблему дальше и быстро нашел ее.
Силовое питание для третьей платы проходит через вторую, по двум довольно толстым дорожкам, но непосредственно перед самим выходом со второй платы оно падает, под нагрузкой, на 1.8В.
Виной всему огромная индуктивность L10! Это она съедает столько напряжения. Я решил избавится от нее таким же способом, как и с индуктивностью L1.

Контакты индуктивности L10 я замкнул, подпаяв к ним кусочек медной проволоки.
После этой процедуры, силовое напряжение до третьей платы стало доходить без потереть. А напряжение питания приемка поднялось до стабильных 5 вольт и не опускается ниже 4.5В даже при разряженном до 6В аккумуляторе!!!
Каких-либо побочных эффектов устранения из цепи питания индуктивностей L1 и L10 мною замечено не было! Очки работают отлично.
Данная модификация будет очень полезна всем владельцам приемников RapidFIRE и Clearview, а также другим, требовательным к питанию приемникам.
Осталась лишь одна проблема которую я никак не могу решить - это проблема несвоевременного сигнал о низком заряде аккумулятора.
Питание очков Fat Shark HD3 может осуществляться как от блока с Li-po аккумуляторами таки от блока с Li-ion аккумуляторами, в моем случае это блок с Li-ion аккумуляторами, которые могут без каких-либо проблем разряжаться до 3В на банку. Но к сожалению, сигнал о низком заряде аккумулятора в очках настроен на срабатывания при 6.8В. Это получается 3.4В на банку, для двухбаночного аккумулятора. Эта цифра отлично подходит для Li-po аккумуляторов, но не для Li-ion.
По факту, в момент срабатывания сигналя в Li-ion аккумуляторах остается еще половина заряда!
Я долго искал решение этой проблемы и вдруг мне попалась запись по этому поводу!
intofpv.com/t-fatshark-goggle-low-battery-warning-…
Я очень обрадовался! и побежал в магазин за необходимыми деталями.
Данную статью написал Александр Федоров, он создает интересные девайсы www.facebook.com/…/KissKeychainConfigurator/
Суть модификации сводится к изменению номинала одного из резисторов в делителе напряжения. Александр заменил резистор R45 с 9.9кОм до 7.5кОм, после это сигнал о низком заряде аккумулятора стал срабатывать при напряжении в 6В.
Нужно оговорится, что Александр проделал эту операцию не с очками, а только со второй платой, которая питалась от регулируемого блока питания, и больше не к чему не была присоединена.
Я проделал туже модификацию с резистором R45 на своих очках и к сожалению, не получил такого же результата.
При замене резистора R45 на 7.5кОм, очки начинали пищать только при падении напряжения до 5.7В, когда уже отключались даже экраны очков.
Я пытался подобрать номинал резистора, но не достиг желаемого результата. Оказалось, что порог изменения номинала резистора очень узкий! Максиму что я смог сделать это понизить напряжения срабатывания звукового сигнала до 6.6В. Для этого я уменьшил номинал резистора R45 до 9.21кОм, подпаяв в параллель к нему резистор на 134кОм. При этом если уменьшить номинал резистора R45 до 9,16кОм, параллельно подпаяв резистор на 124кОм, то очки начинают пищать только при падении напряжения до 5.7В, что, как вы понимаете, не приемлемо.
Я не знаю в чем причина такого поведения делителя напряжения. Возможно кто-то из форумчан поможет разобраться в этом вопросе и наконец закрыть тему с модификацией эти чудо очков.
P.S.
Для просмотра больших картинок откройте их в новой вкладке.
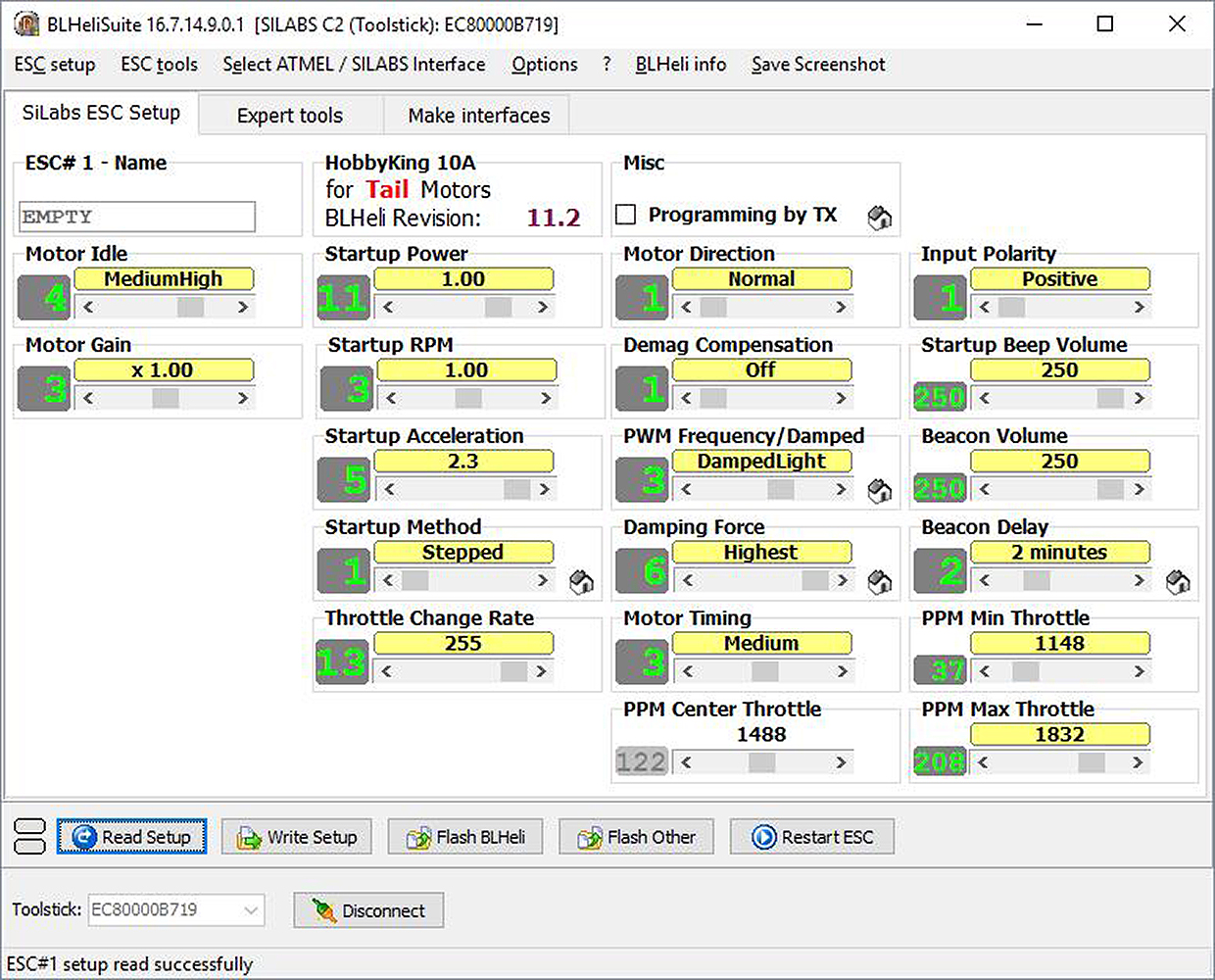
Сегодня расскажу о небольшом, но важном обновлении в вертолете RX120-2S V2

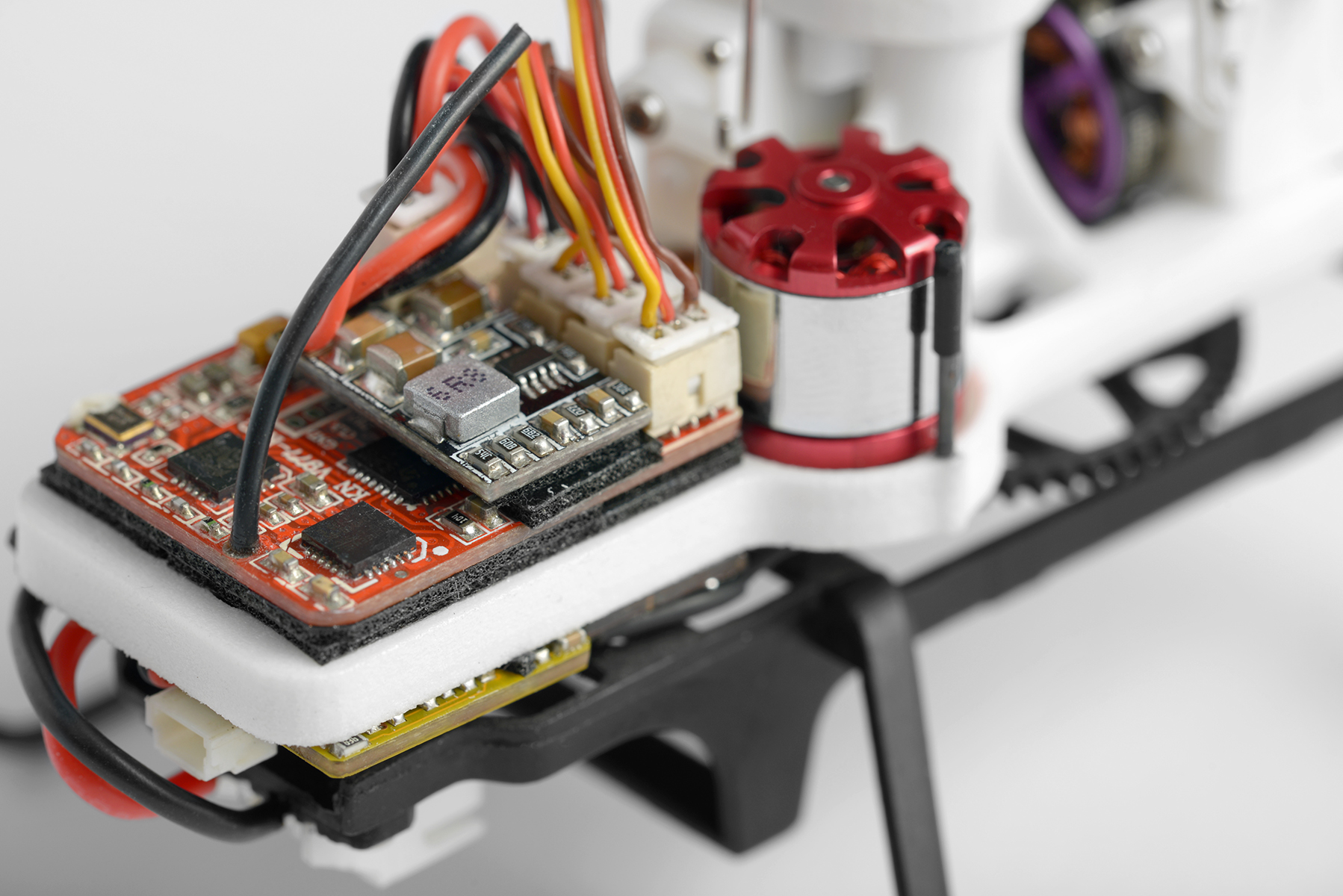
Я наконец-то нашел очень хороший регулятор для хвостового двигателя данного вертолета.
Это регулятор ZTW Spider PRO Premium 20A OPTO ESC
Посоветовал обратить внимание на этот регулятор пользователь mytdbm с форума rcgroups www.rcgroups.com/forums/showpost.php?p=39734533&po…,
за что ему отдельное спасибо!

Регулятор довольно старый, но его еще можно найти в продаже на aliexpress и ebay, по вполне вменяемой цене.
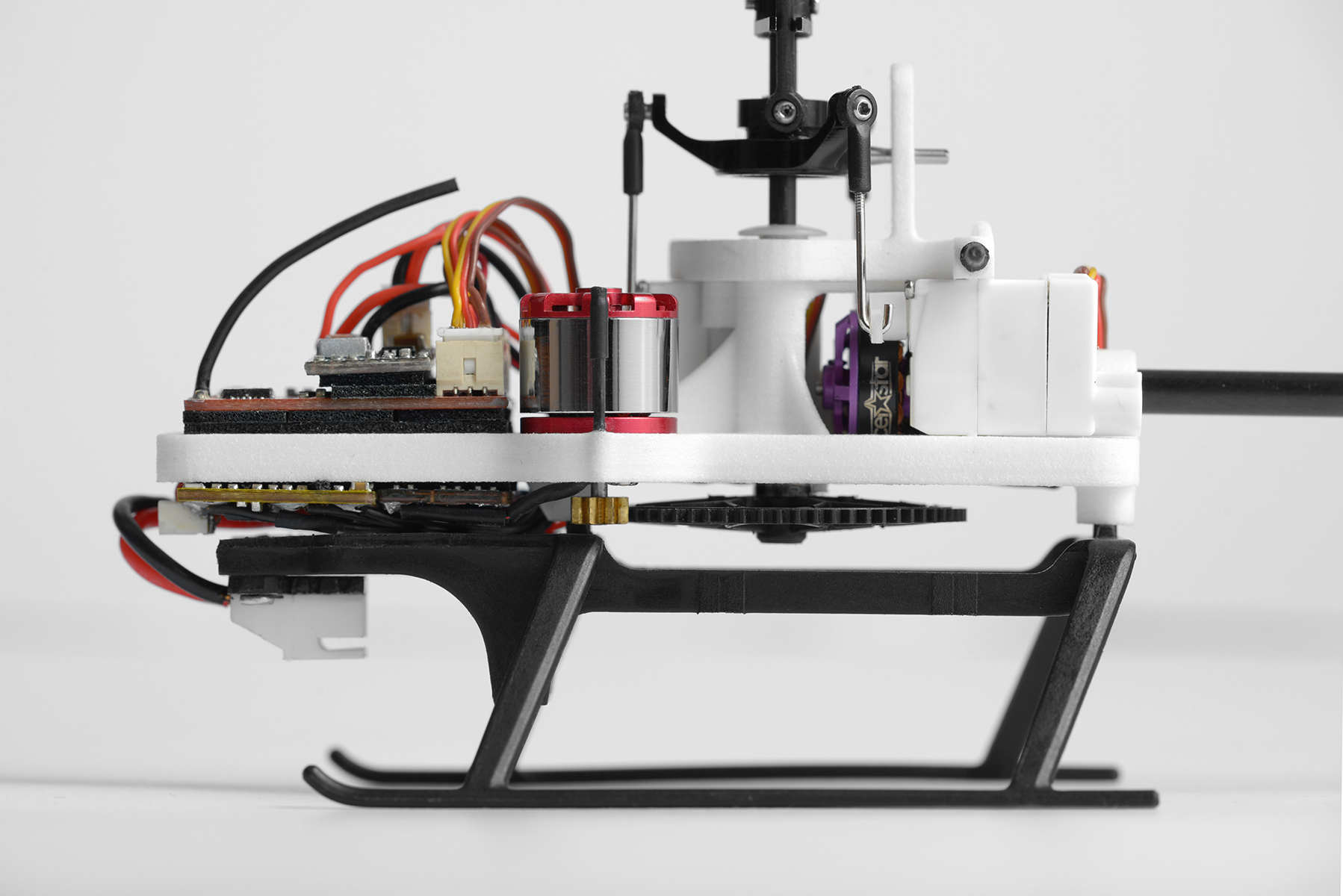
Размер регулятора не самый маленький, он совсем немного меньше чем H-King 10A, но все это перекрывается самым главным его достоинством - скоростью переключения силовых ключей
Скорость очень быстрая! И это очень положительно повлияло на работу хвоста. Хвост стал работать очень четко и точно. В плане четкости даже лучше, чем на однобаночной версии. Но все же легкое перерегулирование хвоста осталось, однако оно стало меньше, по сравнению с перерегулированием при использовании регулятора H-King 10A.
При обычном полете и легких маневрах хвост ведет себя идеально, без всякого перерегулирования, но при резких перекладках шага перерегулирование все-таки проявляется в виде легкого и очень частого подвывания хвостового двигателя. Визуально это не заметно, слышен только звук, однако на полет это не влияет.
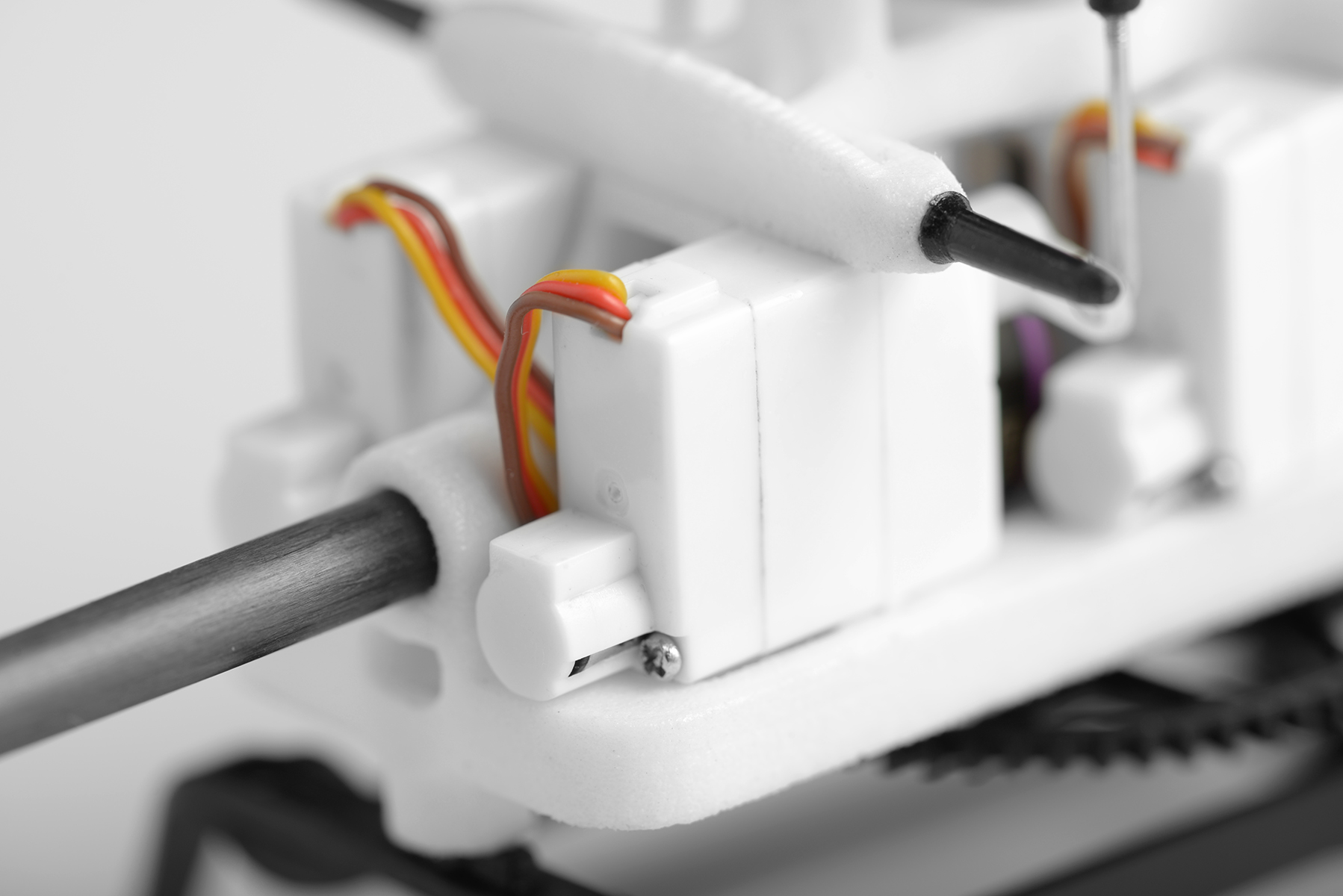
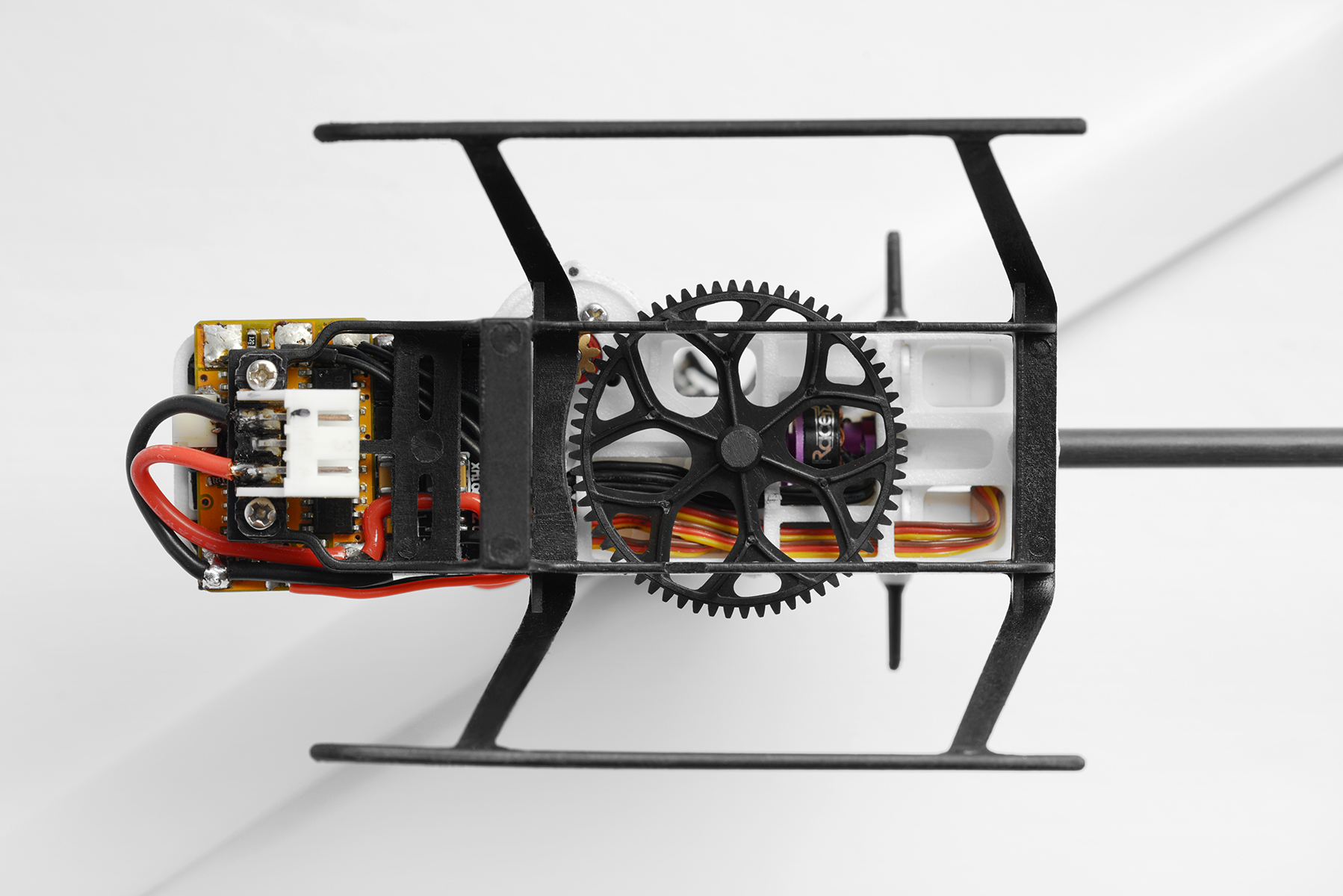
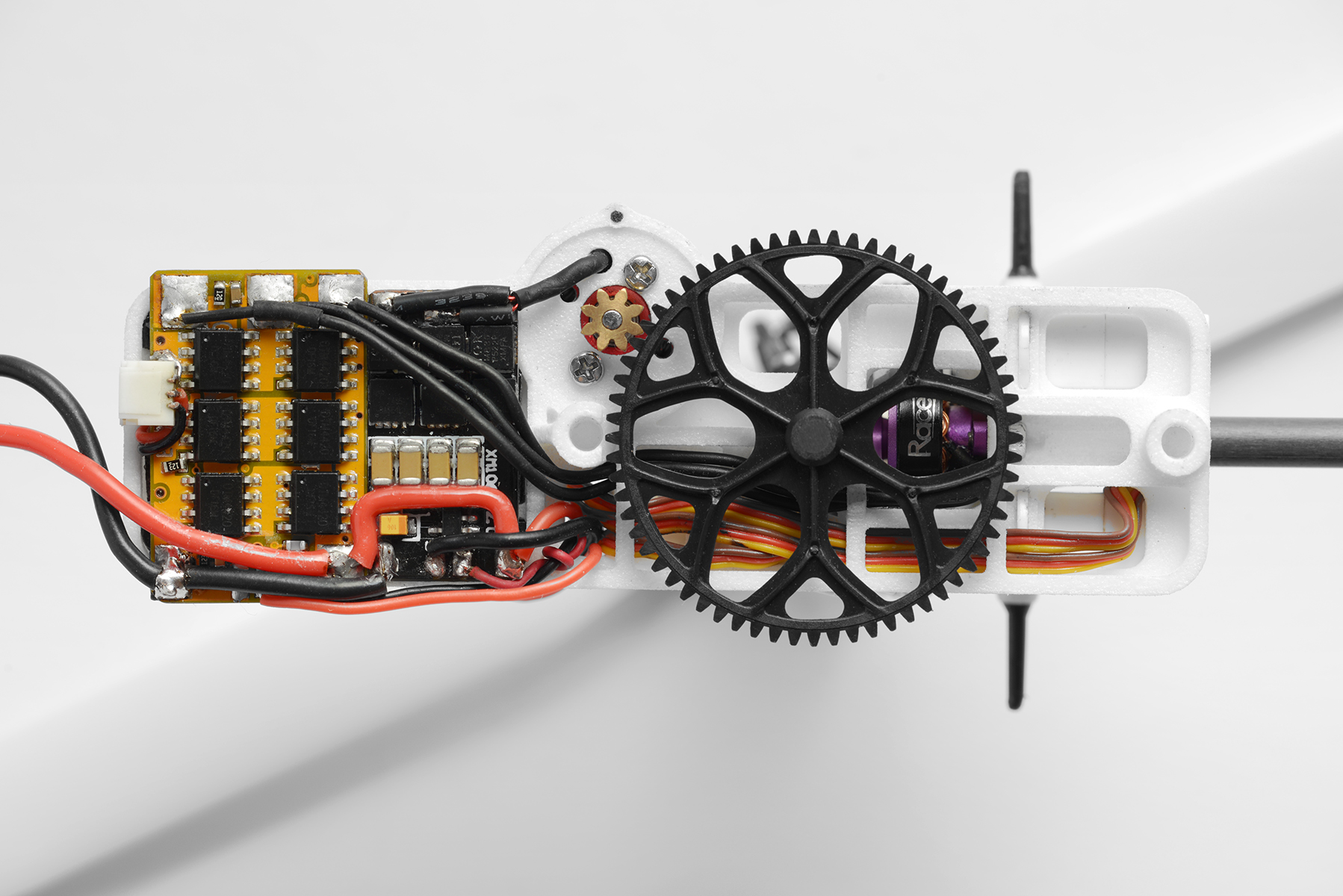
Сам блок регуляторов я расположил вдоль рамы. Хвостовой регулятор, в этот раз, я никак не модифицировал, оставив его в стоковом состоянии.
Регулятор основного двигателя остался все тот же DYS XM10A.
В обеих регуляторах я использовал модифицированную прошивку Blheli 14.9 с поддержкой сигнала ШИМ.
Напомню, что в данном вертолета я использовал полетный контроллер от модели V977.
Я пробовал устанавливать полетный контроллер от вертолета К110, но тесты показали, что для этой модели, в такой конфигурации, этот полетник не подходит. Плата от К110 все-таки имеет другие PID настройки для хвоста. При попытке установить ее на данный вертолет я получил более выраженное перерегулирование хвоста, которое я не смог побороть настройками регулятора. Поэтому, для 2S версии, использование полетного контроллера от вертолета V977 более предпочтительно.
Я подозреваю что плата управления от вертолета К100 также может подойти, так как она имеет другие PID настройки для хвоста, чем плата от К110, но пока проверить это не могу.
Окончательный вес модели получился 57г.
Ну и видео полета с новым регулятором, на котором видна и слышна работа хвоста.
Обновлении от 08.11.18
Удалось испытать вертолет с полетным контроллером от ХК К100

Результат мне понравился.
Больше всего меня интересовал хвост, но тут особых изменений не случилось. Хвост все также хорошо работает, как и с платой от 977, с небольшим пофыркиванием на резких маневрах. А вот управление по циклическому шагу стало лучше. Вертолет стал боле стабильным.
Сама плата мене подвержена влиянию вибраций по сравнению с платой от V977. Приятными бонусами стали возможность увеличить расходы больше 100%, при необходимости, и нормальный протокол управления, с раздельными каналами.
Это продолжение первой rcopen.com/blogs/198531/23374 и второй части статьи rcopen.com/blogs/198531/23375 о модификации очков Fat Shark HD3.
В этой части я расскажу о переносе аккумуляторного блока.
Родное размещение аккумуляторного блока сбоку головы мне не понравилось.
Да, очки в таком виде можно использовать, но приходится сильно натягивать ремень очков, дабы они держались на голове.
Через пару часов полетов ремень передавливает голову и вызывает дискомфорт.
Помимо это аккумуляторный блок все время упирается в ухо и также не добавляет приятных ощущений от использования.
Поэтому я решил перенести аккумулятор очков на заднюю часть головы.


Для переноса аккумуляторного блока назад я спроектировал специальный держатель, а затем распечатал его из белого ABS пластика.



Держатель обработал мелким наждаком и оставил его в матовом виде, чтобы он подходил по текстуре к аккумуляторному блоку.
На внутреннюю поверхность держателя я наклеил мягкий двусторонний скотч, а затем снял со скотча наружный клеящий слой, в итоге внутренняя поверхность держателя получилась не скользкой и не такой твердой. В будущем постараюсь подобрать более мягкий поролон на клейкой основе, чтобы сделать внутреннюю поверхность держателя более мягкой.


Держатель устанавливается на ремень очков и свободно скользит по нему.
Сам аккумуляторный блок вставляется в держатель и крепко удерживается в нем боковыми защелками.
Помимо изготовления держателя мне пришлось удлинить силовой провод, выходящий из аккумулятора.
Провод я сделал частично скрученным, чтобы он мог немного растягиваться при одевании очков на голову.
В итоге полученный результат мне более чем понравился.
Перенос аккумуляторного блока позволил не так сильно натягивать ремень очков, что устранило проблему с пережатыми сосудами и дискомфортом.
Кроме этого очки можно спокойно одеть на лоб, при необходимости, и они не будут спадать вам на глаза, так как теперь тяжелый аккумуляторный блок их не тянет вниз.
С очками на лбу можно спокойно передвигаться, они на лбу и останутся.
Ну и на ухо теперь ничего не давит.
Продолжение следует!
P.S.
Откройте картинки в новой вкладке чтобы посмотреть их в нормальном разрешении.
RX120-2S с полетным контроллером от V977\K110 - попытка номер два!
Несмотря на все трудности, о которых я говорил в предыдущей части rcopen.com/blogs/198531/22702, мне все-таки удалось построить хорошо летающий вертолет RX120-2S с полетным контроллером от V977\K110 и питанием от двух баночного аккумулятора.
Пред дальнейшим чтением очень рекомендую ознакомиться с прошлой записью по этой теме.
Это будет вторая версия вертолета RX120-2S, так как первую версию удалось заставить летать при помощи полетного контроллера 150GRS, о чем можно прочесть также в предыдущих статьях.
rcopen.com/blogs/198531/22978
Итак, внешне практически ничего не изменилось.

Мелкие изменения коснулись рамы. Она стала немного короче в передней части, и слегка расширилось посадочное место под хвостовой двигатель, дабы можно было легко установить в раму разные моторы 1103, с немного отличающимися габаритами.


Остальные изменения коснулись только хвоста и всех связанных с ним элементов вертолета.
Поэтому я не буду подробно рассказывать о сборки вертолета, вы можете прочесть об этом в предыдущей части.


Первым делом я заменил хвостовой двигатель. Установил менее оборотистый мотор на 6500 kV.

Но заменой двигателя проблему перекомпенсации хвоста не решить. Поэтому самым главным изменением является использования регулятора H-King10A
для управления хвостовым двигателем.
Регулятор H-King10A очень старая модель, которая, к сожалению, давно снята с производства. Поэтому найти его в розничной продаже большая редкость. Я совершенно случайно нашел его в одном из магазинов для хобби, и решил взять его для установки в данный вертолет.
Несмотря на то, что данная модель регулятора устаревшая, и больше не выпускается, она имеет силовые ключи, поддерживающие довольно быструю скорость коммутации. Этот фактор играет ключевую роль в стабильной и правильной работе хвоста.
Как вы можете заменить регулятор имеет довольно большие размеры, поэтому мне пришлось его немного изменить. В оригинале, к регулятору был подпаян конденсатор на 100мКф 25В, который еще больше увеличивал габариты регулятора. Я удалил данный конденсатор.
Помимо этого, на обратной стороне регулятор имелся стабилизатор напряжения, который питал логическую часть самого регулятора, а также данный стабилизатор являлся частью ВЕС на 5В\1А.
Я думаю, что встроенного в регулятор ВЕС не хватило бы для питания платы управления и сервоприводов. Поэтому, как и прошлый раз, я использовал внешний, более мощный, ВЕС для этих целей. В связи с этим, а также учитывая тот факт, что я удалил большой конденсатор, я решил отказаться и от стабилизатора, установленного в регуляторе, так как он довольно больших размеров и мешал нормальному крепежу регулятора к раме вертолета, ну а без конденсатора возможно были бы проблемы с питанием логической части регулятора и со стабильностью его работы.
Так как после всех манипуляций логическая часть регулятора осталось обесточенной, возникла необходимость подвести к ней внешнее питание 5В, для ее работы. Поэтому я пустил дополнительный провод питания от внешнего ВЕС к хвостовому регулятору, который подпаял на выход ВЕС на регуляторе.
В итоге я смог боле менее нормально закрепить регулятор на раме вертолета и снизил его вес до 2.1г.
Помимо хвостового регулятора, в данной сборе изменился и основной регулятор, но это никак не отражается на работе вертолета.
В качестве основного регулятора я установил DYS XM10A.
Остальная механика вертолета осталась без изменений.


Установка менее оборотистого двигателя и более быстрого регулятора позволило решить основную проблему- перекомпенсации хвоста.
Пришлось довольно долго подбирать настройки для хвостового регулятора, но в итоге мне удалось добиться практически идеальной работы хвоста.
Рабочими оказались только 11.х версии прошивок BLheli.
Только на резких перекладках шага присутствуют небольшое завывания хвостового двигателя, которое визуально не заметно.
Данная модель имеет ряд преимуществ по сравнению с первой версией, но также есть и недостатки.
Из плюсов могу отметить наличие в продаже подходящей механики головы для данной модели. Нет необходимости собирать голову из разных комплектов.
Также итоговая стоимость вертолета чуть ниже за счет боле дешевого и доступного полетного контроллера.
Общая производительность по коллективному шагу у данной модели выше, по сравнению с первой версией.
Из недостатков конечно же можно отметить качество стабилизации полетного контроллера, которое все-таки хуже, чем у полетного контроллера 150GRS.
Данная модель получилась тяжелее на 3.5г, за счет боле тяжелых регуляторов оборотов и использования внешнего ВЕС для питания платы управления и сервоприводов.
Итоговый вес модели получился 56.7 г
Ну и одно групповое фото, первой и второй версии вертолета RX120-2S.

По видео можно оценить полет данной модели. В общем, результатом я более чем доволен.
В ближайшем времени планирую проверить работу данной модели с полетным контроллером от К110, чтобы уж наверняка убедится в том, что он также подходит.
P.S.
Для просмотра картинок в большем разрешении открывайте их в новой вкладке.
С недавних пор стал я обладателем FPV очков Fat Shark HD3.
Это мои первые FPV очки и выбирал я их очень долго.
Сразу хочу отметить, я не хотел покупать Fat Shark HD3, и вообще не хотел связываться с продукцией Fat Shark, и на это есть причины, о которых вы узнаете ниже. Поэтому не ждите хвалебных отзывов в этой статье, хотя конечно я постараюсь быть максимально объективным.
К моему огромному сожалению и не пониманию как такое вообще возможно, к моменту покупки этих очков, на рынке не появилось достойного конкурента фирме Fat Shark.
Мои надежды на новичков в этом сегменте, в виде очков Topsky F7X, рухнули после провального выхода их на рынок. После этого, казалось бы, уже не новички в индустрии, Skyzone, выпустили на рынок новую, многообещающую модель Skyzone SKY03, которая также имела серьёзные недостатки, напрочь перечеркивающие все достоинства этой модели. Очки Eachine EV200D и Jerolac Kaptain G вообще не вышли на рынок, даже на момент написания этой статьи. Все это не оставило мне выбора, и я приобрел Fat Shark HD3.
Несмотря на свою популярность, Fat Shark HD3 имеет ряд недостатков и конструктивных недочетов. Я вообще не могу понять, как производитель мог выпустить их на рынок в таком виде? А если учесть стоимость этих очков в 400$ за более дешевую версию CORE и 500$ за полную версию, для меня до сих пор остаются загадкой, почему никто не сделал что-то лучшее ?!
Единственное оправдания тому, что Fat Shark HD3 на сегодня, наверное, одни из самых продаваемых FPV очков, является их единственный плюс - они неплохо выполняют свою основную функцию и имеют вполне нормальную картинку. А отсутствие долгое время конкурентов, способных выпустить по-настоящему хороший продукт в этом сегменте, позволял компании Fat Shark безнаказанно доминировать и не заботиться об улучшении качества своей продукции.
К счастью время не стоит на месте и на рынке появляются новые игроки, новые продукты от уже известных фирм, которые способны конкурировать с Fat Shark.
Возможно эти факты заставят менеджеров компании Fat Shark пересмотреть свое видении, и выпускать на рынок продукты, соответствующие современным требованием и тенденциям рынка.
Хотя если рассматривать свежую новинку от Fat Shark, очки НDO, то можно смело сказать компания, к сожалению, упорно продолжает двигаться не в том направлении.
Как я уже говорил, на мой взгляд Fat Shark HD3 - это яркий пример “сырого” продукта, который переоценен пользователями в связи с отсутствием достойной альтернативы. Но покупая продукт за 400$, вы ожидаете от него что-то большее, чем просто хорошая картинка. И тут к сожалению, Fat Shark HD3 не может ничего вам предложить.
Можно долго рассуждать о штатном способе подключения питания к вентилятору, можно долго удивляться способу реализации его включения.
Так же можно длительное время размышлять о том, почему производитель не предусмотрел кнопку включения выключения питания самих очков.
Одев очки на голову можно мучительно долго пытаться понять, что двигало инженерами, которые додумались расположить большой и тяжелый батарейный блок сбоку так, чтобы он давил вам на ухо и не давал забыть о том, что вы заплатили 400$ за это удовольствие.
Включив очки, вы конечно же захотите попасть в меню настроек, покрутить разные параметры, настроить в конце концов насыщенность, яркость и контрастность картинки. Но не тут-то было!!! В 21 веке компания Fat Shark решила, что ни к чему вам это хвастовство, и что такому продукту как FPV очки не нужно никакое меню настроек! Более того, вам будет достаточно одной кнопки для смены режимов и одного джойстика для настройки яркости и контрастности. А как же настройка насыщенности или цветовой температуры, или вообще калибровка цветов, спросите вы? А никак! Вам это не нужно!
Ну и когда вы уже смерились со своей участью, когда путем понижения контрастности и увеличения яркости вы хоть как-то смогли поднять насыщенность картинки, когда разобрались с тем как заставить DVR записать видео вашего полета, вы вдруг обнаруживаете главное, нет ГЛАВНУЮ ВИШЕНКУ НА ТОРТЕ, в виде маленького переключателя в нижней части очков, с надписью RX! Вы могли подумать все что угодно про его назначение, но только не то что этот переключатель просто отключает питание от вашего видеоприемника, для того чтобы картинка с видеоприемника не накладывалась на меню DVR, и вы смогли нормально просматривать записанные видеозаписи, попасть в меню настройки самой DVR, а также подключить очки по HDMI кабелю. И я подчеркиваю - это все в 21 веке!!!
Я подобным способом решил проблему наложения картинки при встраивании DVR в свой монитор rcopen.com/blogs/198531/21996! Но я никак не ожидал увидеть подобный “костыль” в продукте за 400$, в 21 веке!
Вспомнив про недостатки явные, хотелось бы отметить и другие “приятные” особенности Fat Shark HD3.
“Гениальное” решение звуковой и световой индикации разряда аккумуляторов! Казалось бы, что в нем не так? Все вроде работает, показывает и пищит, но эта индикация настроена на литий-полимерные аккумуляторы. Порог срабатывание звукового сигнала о разряде аккумулятора в очках настрое на 3.5В. Это нормально для литий-полимерных аккумуляторов, но мои очки поставляются с кейсом для литий-ионных аккумуляторов размера 18650, которые можно разряжать до 2.7В! а при желании и до 2.5В. То есть в тот момент, когда очки начнут вам сигнализировать о разряде аккумулятора, в вашей литий-ионных аккумуляторах останется еще половина заряда.
Также хотелось бы отметить скромны диапазон регулировки межзрачкового расстояния.
Я уверен, что для подавляющего большинства пользователей широты диапазона регулировки вполне хватит, однако для меня минимальное значение регулировки оказалось не совсем достаточным.
Световая индикация включенной записи DVR реализовано на мой взгляд очень грубо. Мне пришлось сделать заглушку для сигнального светодиода, чтобы он не светил мне прямо в глаза и не мешал мне.
Общее качество сборки и качество материалов также меня не порадовало.
Пластиковые части корпуса состыкованы не во всех местах идеально. Корпус покрашен, и краска не отличается особой стойкостью. После недолгого использования я уже сумел оставить на корпусе несколько царапин.
Новые очки имели неприятный запах, я долго пытался понять в чем дело, оказалось неприятный запах имел кейс, в который были упакованы очки. Этим запахам пропитались и очки.
Со временем запах конечно же выветрился, но положительного первого впечатление от очков это конечно же не добавляет.
Помимо всего выше перечисленного, в моем экземпляре очков обнаружилась соринка в левом окуляре! Пришлось разбирать очки, разбирать окуляр и выдувать соринку. А между прочим, как раз на окулярах стоят заводские гарантийные стикеры, но я сумел разобрать окуляр не повредив стикер, о чем расскажу ниже.
Разборка очков выявила небрежности внутренней сборки. Все платы очков оказались грязными, не отмытыми от флюса. А разборка окуляра обнажила еще одну недоработку инженеров. Все линзы в видео-модуле не имеют торцевого чернения. Этот факт вызывает паразитные засветки вокруг картинки в окуляре и никак не добавляет ей положительных качеств.
Но нельзя все о плохом да о плохом. Есть и положительные стороны.
Из плюсов могу отметить конечно же неплохую картинку, без каких-либо искажений. Единственно что цветопередача могла быть и получше.
Хороший угол обзора в 42 градуса также радует глаз.
Форма очков и маски вполне приятная и очки удобно сидят на лице.
Модульная конструкция позволяет использовать очки с различными радио модулями, работающими на разных частотах, что значительно расширяет сферу применения данных очков.
Наличия нормально работающего HDMI входа.
Все выше перечисленное, как вы понимаете теперь, может обосновать мое нежелание связываться с продукцией фирмы Fat Shark, и в тоже самое время без альтернативность моего выбора.
Но пока нет других вариантов, и есть необходимость пользоваться очками, я решил исправить недостатки данных очков и получать от их использования больше удовольствия.
Уместить мой рассказ в одну запись не получится, поэтому я разбил статью на 2 части. В этой части будем дорабатывать непосредственно очки.
Начнем с самого сложного. Будем чернить торцевые поверхности всех линз и расширять диапазон регулировки межзрачкового расстояния в меньшую сторону.
По мимо меня, очками пользуется мой девятилетний сын и для него эта модификация еще актуальнее.
Разбираем очки, и отсоединяем все модули.
Разбираем видео-модуль на два окуляра.
Если вам необходимо разобрать окуляр для того чтобы просто убрать соринку в окуляре, то его можно разобрать не повредив, гарантийный стикер. Предварительно нагрейте стикер феном, и аккуратно отклейте его.
В моем случае о какой-либо гарантии можно не думать, поэтому в дальнейшем я удалил все стикеры.
После того как вы открутите три самореза можно будет снять крышку окуляра.
Под крышкой мы видел три линзы и саму матрицу видео-модуля.
Линза, которая находится возле матрица выполнена из стекла, остальные две линзы пластиковые.
Извлекаем все линзы из модуля и зарисовываем их торцевые поверхности черным маркером, либо черной краской или лаком.
Внешняя линза находится в пластиковой оправе, из которой её можно легко извлечь и также зачернить торец.
После чернения возвращаем линзы на место, в такие же положения в которых они находились.
Проделываем такую же операцию со втором модулем, продуваем их и закрываем крышками.
Для проверки не остались ли в видео-модулях какие-либо соринки, соединяем все блоки очков вместе и включаем их. При необходимости снимаем крышку окуляра и еще раз продуваем модуль, если вдруг в нем остался какой-либо мусор.
В результате мы получаем гораздо более приятную картинку без лишних полукруглых белых бликов и ореолов, вокруг изображения. Всем очень рекомендую сделать чернение линз в окулярах.
После того как мы закончили с чернением, приступаем к расширению регулировки межзрачкового диапазона.
Для этого придется удлинить на 1.5мм направляющий вырез в корпусе окуляров, и срезать несколько выступающих частей.
Все это можно сделать простым скальпелем.
Это позволит окуляром сближаться друг с другом еще сильнее, вплоть до упора направляющей части корпуса одного окуляра в противоположный окуляр.
Но как вы понимаете, модификацией одних лишь окуляров мы ничего не решим.
Необходимо полностью новый механизм изменения межзрачкового расстояния, который бы смог сдвигать наши окуляры сильнее.
При желании можно модернизировать родные регулировочные ручки так, чтобы они могли сдвигаться сильнее вовнутрь, но я решил сделать новые.
Для этого спроектировал модель ручек и распечатал их на обычном FDM 3D-принтере.
В результате, после некоторой механической обработки и шлифовки получились вот такие регулировочные ручки.
Помимо новых ручек необходимо немного модернизировать сам корпус очков, чтобы он не мешал окулярам сдвигаться сильнее.
Нужно удалить некоторые части корпуса, и немного увеличить уже имеющиеся вырезы.
Справа корпус в оригинальном виде, слева мешающая часть корпуса удалена.
На нижней половинке корпуса проделываем такую же операцию. Так же правая часть корпуса в оригинальном виде, слева мешающая часть корпуса удалена.
Кроме этого, на нижней половинке корпуса необходимо расширить уже имеющиеся вырезы. В итоге корпус должен иметь следующий вид.
После всех манипуляций с корпусом извлекаем из него родные ручки регулировки межзрачкового расстояния и устанавливаем новые.
После установки новых ручек регулировки, диапазон регулирования расширился на 2.5мм в меньшую сторону. При желании можно расширить диапазон и в большую сторону регулирования, но у меня такая задача не стояла.
На следующем фото видна разница в минимальном положении окуляров до и после модификации.
Левый окуляр в минимальном положении с оригинальной ручкой регулировки, а правый окуляр в минимальном положении с новой ручкой регулировки.
Разница как говорится на лицо!
На этой фотографии видно оба окуляра в минимальном положении регулировки, с модифицированными ручками.
Помимо этого, на данном фото видна заглушка для индикационного светодиода DVR.
С нижней стороны ручки регулировки выглядят как заводские, только форма самих выступов не продолговатая, а круглая, за счет чего как раз и удалось добиться большего диапазона регулировки, при этом не увеличивая пазы для хода ручек в самом корпусе очков.
Как я уже сказал выше мне удалось уменьшить минимальное значение регулировки межзрачкового расстояния на 2.5мм.
При необходимости это значение можно еще увеличить, но мне текущего результата более чем достаточно и сын также отметил, что ему стало комфортнее.
На этом этапе модификация самих очков заканчивается, и мы переходим к следующей части изменений батарейного отсека и не только.
Поэтому переходим по ссылке и читаем продолжение.
Это продолжение первой части статьи rcopen.com/blogs/198531/23374 о модификации очков Fat Shark HD3.
В этой части будем модифицировать отсек под аккумуляторы, а также сделаем новую декоративную крышку для радио-модуля.
Начнем с отсека под аккумуляторы.
Я долго думал, как реализовать кнопку выключения очков для того чтобы не выдергивать каждый раз штекер питания из корпуса.
Сначала я планировал установить кнопку включения\выключения в сами очки, но после отказался от этой идеи в пользу установки такой кнопки непосредственно в корпус отсека под аккумуляторы.
По мимо этого возникло желания заряжать аккумуляторы 18650 от имеющейся у меня зарядки TURNIGY Reaktor, не вынимая их из аккумуляторного отсека.
А для этого необходим балансировочный провод, поэтому, помимо кнопки включения выключения, я решил добавить его.
Начнем с разборки отсека.
Для этого необходимо отклеить наклейки с боковых поверхностей блока, под которыми находятся три самореза, два с одной стороны и один с другой. Откручиваем саморезы и отщелкиваем боковые крышки. Они держатся на довольно тугих защелках, поэтому придется постараться, чтобы разобрать отсек ничего не повредив.
Как можно видеть свободного места в отсеки совсем мало, но придется работать с тем, что есть.
В качестве кнопки включения питания я выбрал мелкий переключатель. Мне хотелось установить переключатель кнопочного типа с фиксацией, но все они большего размера, а установить что-то большее в корпус отсека мне не представилось возможным.
Токи потребления проходящий через переключатель небольшой, поэтому даже такой мелкий переключатель справится с функцией включения\выключения питания.
Я нашел для него вполне подходящее под его размеры место. Пришлось немного доработать корпус отсека для установки переключателя, в итоге он стал там как родной.
Кроме переключателя я также установил недостающий провод для балансировочного разъема.
Провод подпаял к общей контактной площадке аккумуляторов на крышке отсека. Сам провод провел вдоль корпуса и вывел на другую сторону. В районе перехода провода из корпуса на крышку отсека я немного подрезал корпус отсека и оставил небольшой загиб, из провода, который позволит ему свободно двигаться вместе с открывающейся крышкой.
После этого я вывел все провода на другую сторону отсека. Провод от переключателя подсоединил к выходному силовому проводу, а балансировочные провода подпаял к трёхпиновому Futaba servo разъему, который вклеил в корпус батарейного отсека. Для балансировочного разъема я прорезал в корпусе отсека специальное отверстие.
Силовой провод со штекером я немного укоротил, чтобы он не топорщился при подключении к очкам.
В собранном виде аккумуляторный отсек стал смотреться гораздо чище. Теперь из него выходит только силовой провод!
Кнопка включения\выключения не сильно заметна и в общем смотрится не плохо.
Но главное, что свою функцию она выполняет и пользоваться очками стало приятнее. Теперь нет необходимости каждый раз выдергивать штекер питания из очков.
Ну а отверстие под балансировочный разъем получилось вообще замечательно.
Для зарядки аккумуляторов 18650 в батарейном отсеке я сделал специальный провод-переходник, при помощи которого можно подсоединять блок к зарядному устройству.
Так как я отказался от провода, питающего вентилятор, я вывел провода для подключения питания к вентилятору непосредственно из очков, подпаяв их к гнезду питания на плате.
Решение не самое изящное, но зато простое и эффективное.
На этом большинство недостатков данных очков мне удалось устранить, но мне захотелось большего.
В качестве приемника видеосигнала я использую модуль Realacc RX5808 PRO PLUS.
Модуль отлично справляется со своей задачей, но к сожалению декоративная крышка для данного модуля не блещет красотой и вообще спроектировано очень плохо, и не сильно подходит к корпусу очков, без дополнительной доработки. Помимо этого, пластик, из которого сделана крышка, сильно подвержен влиянию ультрафиолета и со временем меняет свой цвет на грязно-желтый. Все это заставило меня задуматься о изготовлении другой декоративной крышки для отсека радио модуля.
Перешерстив просторы интернета я, к сожалению, а может к счастью, так и не нашел вменяемой 3D модели крышки для приемника Realacc RX5808 PRO PLUS.
Все модели, которые мне удалось найти, спроектированы левой ногой, и далеки от нужных размер и форм, а про эстетическую часть я вообще молчу.
Поэтому было принято решение создать свою модель крышки и распечатать ее на 3D принтере.
Процесс моделирования оказался не простым. Форма отсека под радио-модуль, в корпусе очков имеет довольно сложную геометрию.
На первый взгляд отсек имеет простую форму, но по мере внимательно рассмотрения и снятия размеров с корпус очков, понимаешь, что это совсем не так.
Так как корпус очков производится путем литья, то и оптимизирован он под особенности данного процесса. На половинках корпуса имеются обратные углы для обеспечения легкой выемки корпуса из литьевой формы. Радиусы скругления на корпусе имею не постоянное значение. Геометрия крепежных элементов крышки в верхней и нижней части корпуса не симметрична.
Все эти нюансы нужно учитывать при проектировании, для того чтобы в результате получить хорошо закрывающуюся крышку нужной геометрической формы.
Я решил сделать две модели крышки, одну по типу крышки как у модуля Furious True-D V3.5, а вторую более компактную, по размерам отсека в корпусе очков.
С первого раза у меня не получилось учесть все нюансы, не получилось и со второго. Поэтому пришлось распечатывать крышки три раза.
Печатал на обычном FDM белым ABS пластиком.
После распечатки я подверг крышки механической обработки и отполировал лицевую поверхность. В результате получил готовые изделия, которые даже не пришлось красить.
Обе модели крышки мне нравятся, и я не могу определится какая больше, потому меняю их периодически)
Ну а с установленными антеннами очки смотрят так.
В итоге я смог устранить ряд недостатков данных очков. Но это конечно не все недостатки, которые я планирую устранить.
Очень бы хотелось исправить проблему неправильной звуковой индикации разряда аккумуляторов. Для этого нужно изменить номинал некоторых резисторов на плате питания очков. Я не силен в электронике, поэтому мне сложно найти и понять номинал каких резисторов нужно изменить. Буду рад любым дельным советам в этом направлении. Возможно кто-то уже смог решит этот вопрос, но мне не удалось найти какой-либо информации по этому поводу касательно модели HD3.
По мимо этого остался открытым вопрос с перенесением аккумуляторного блока назад. Проблема не столь насущна, но тем не менее хотелось бы также её устранить.
Самым простым решением может быть приобретение ремешка от очков Aomway Commander, но мне кажется, что он не подойдет по ширине. Владельцы очков Aomway Commander, подскажите пожалуйста ширину ремешка, чтобы подтвердить или опровергнуть мои догадки.
Если кто-то может подсказать где можно купить готовый желательно одноцветный, серый или черный, ремешок для очков с креплением аккумулятора сзади, буду благодарен за совет.
Уместить все фотографии, которые бы мне хотелось, в данной записи не представляется возможным, поэтому по ссылке ниже вы сможете найти фотографии в нормальном разрешении и в большем количестве.
Надеюсь, что коллективный разум поможет мне устранить еще некоторые недостатки данных очков.
Но, а на этом пока все.
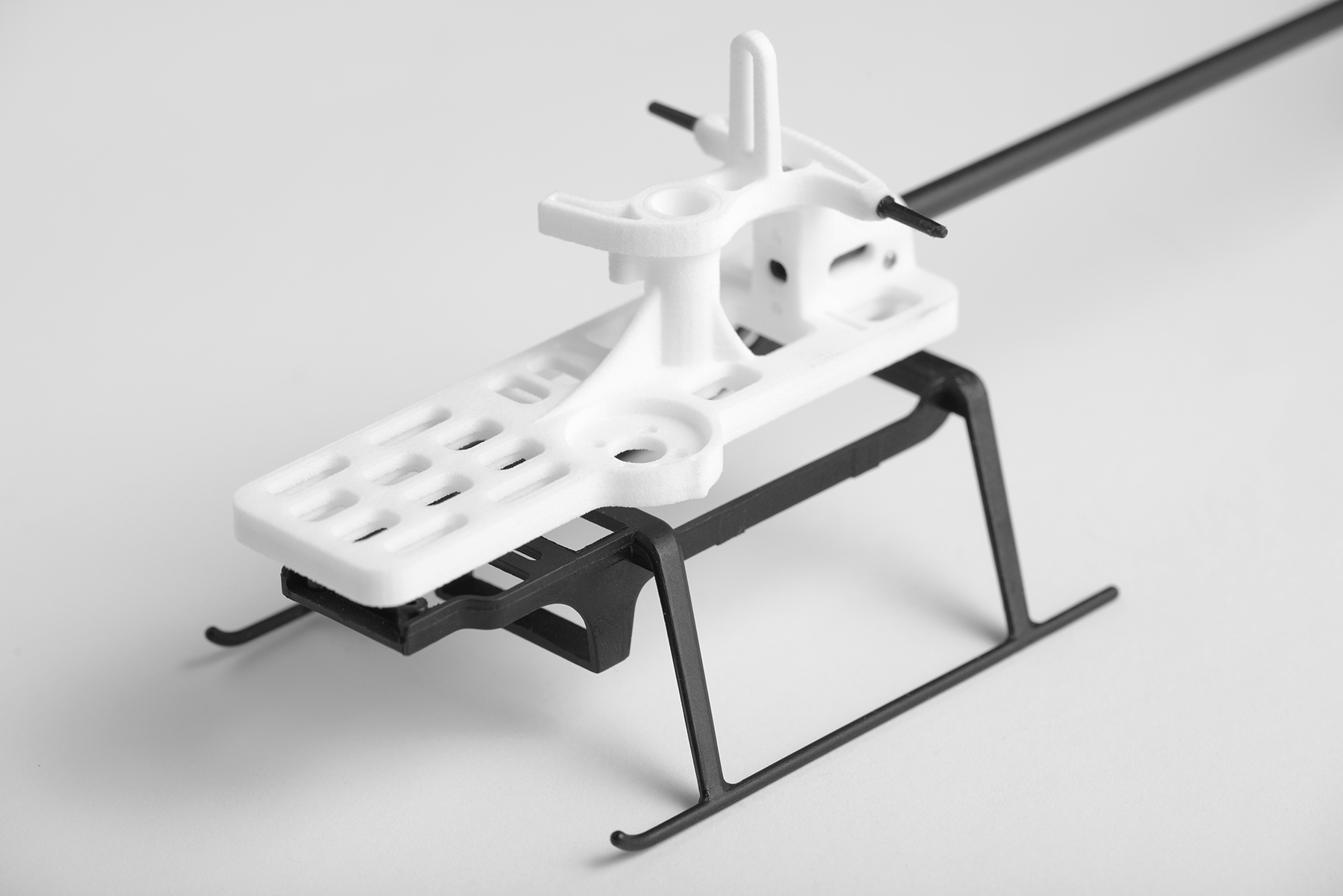
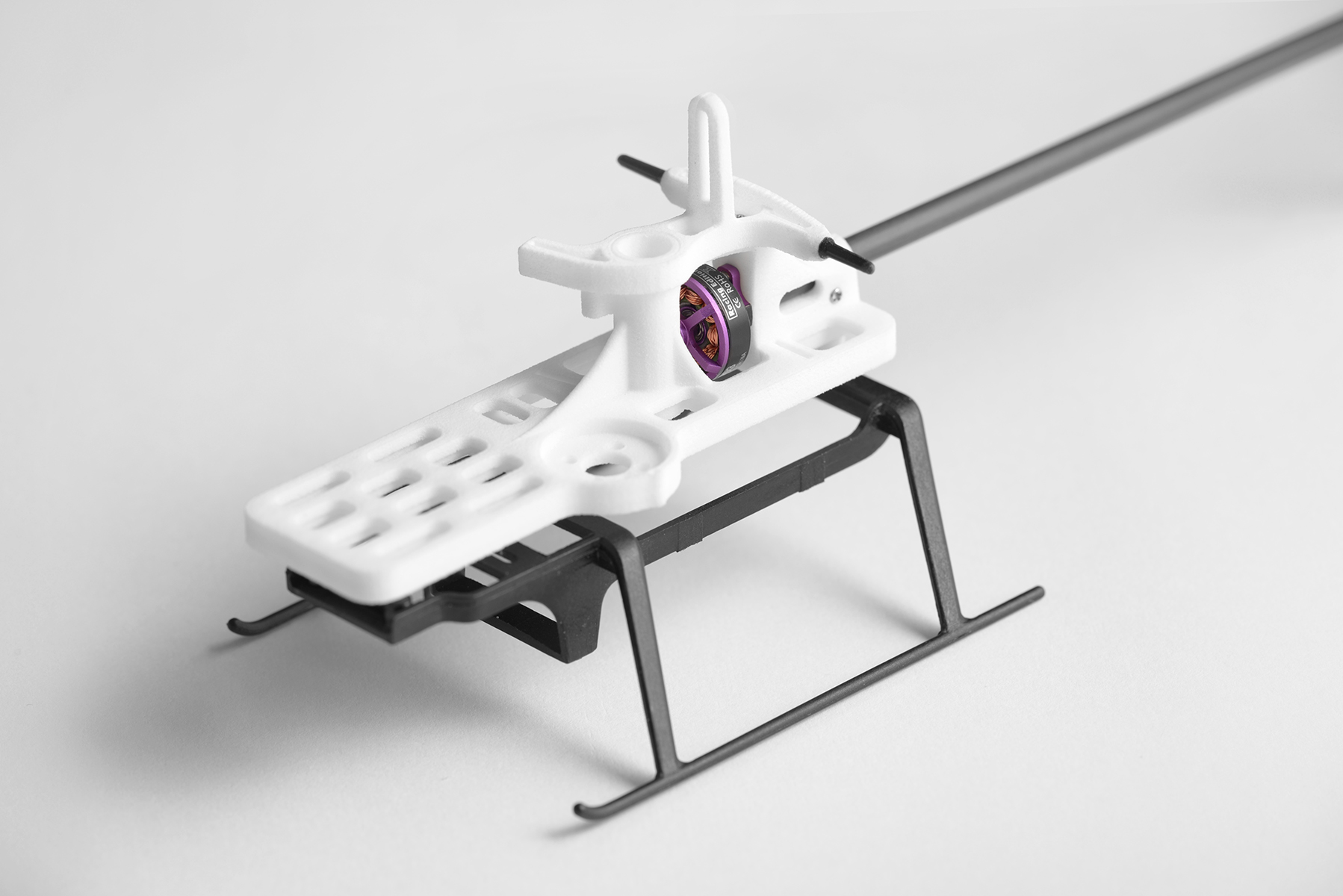
В продолжении темы напечатанного вертолета RX80 rcopen.com/blogs/198531/22901 я решил напечатать не только раму, но и всю механику головы.
Все элементы напечатал из того же материала, что и сама рама вертолета, РА2200.
Межлопастной вал, упорные шайбы и подшипники использовал от вертолета HCP60.
Шарики под тяги я сделал из маленьких саморезов, диаметром 1мм и 0,8мм. Токарным способом обточил шляпки саморезов до диаметра 1.5мм и затем вкрутил их в пластиковые части головы.
Рыбий глаз для тарелки сделал также пластиковым.
Получилось все довольно красиво и крепко!
После сборки решил, что белая голова быстро превратится в грязную и покрасил все пластиковые элементы черным маркером.
Так внешний вид мне понравился еще больше.
Конструкция головы немного отличается от головы вертолета HCP60.
В первую очередь конструкция хаба боле крепкая. Длинна цапф увеличена, чтобы немного увеличить диаметр ротора.
Передаточное число также отличается немного в меньшую сторону, поэтому пришлось поднять высокие расходы до привычных 100%. Изменение передаточного числа положительно сказалось на управляемость вертолета.
В общем голова вполне рабочая и уже прошла летные испытания. Серьезных крашей пока не было, а легкие падения она выдерживает.
Продолжая тему модернизации аппаратуры управления Devo 10, хочу рассказать от том как заставить её говорить.
Для этого вам понадобятся дополнительные компоненты.
DFPlayer banggood.com/DFPlayer-Mini-MP3-Player-Module-For-A…
и динамик, banggood.com/Upgrade-Taranis-Loudspeaker-for-Frsky….
Я же использовал динамик от старой разобранной детской игрушки.
По мимо этого вам понадобится miniSD карточка, можно совершенно маленького объема, на несколько мегабайт.
Для начала выбираем место установки DFPlayer.
Я решил установить его на нижнюю левую плату пульта, так чтобы можно было вывести отверстие для miniSD карты в батарейный отсек.
Для начала подготовим сам плеер к установке. Подпаиваем к нему ножки, которыми он будет крепится к плате.
Дальше необходимо подготовить место установки, и подпаять плеер к плате.
Плеер будет подпаян к плате минусовыми контактами.
Поверхность платы также является минусом, однако соединять минус плеера и минус платы нельзя! Если это сделать, то не будут работать кнопки управления пультом, расположенные на плате.
Поэтому на плате необходимо отделить от минуса 2 прямоугольника, просто прорезав или процарапав поверхность острым инструментом. Дальше зачистить и залудить эти прямоугольные области и подпаять к ним плеер.
После этого подпаиваем к плееру необходимую проводку, питания и управления.
Минус я взял с соседней платы на которой расположен экран пульта. Плюс 5В взял с основной платы, с пина VDD, расположенного возле передающего модуля.
Управляющий провод также подпаял к основной плате, к разъему тренерского порта, к пину TX. Это крайний черный провод.
Более подробную информацию по распиновке можно посмотреть тут www.deviationtx.com/wiki/voiceoutput
Теперь необходимо установить и подключить динамик к Плееру.
Для этого я снял основную плату пульта, под которой находится пищалка. Родную пищалку я удалил и на е место установил динамик, а пищалку перенес выше.
Для этого, в текстолитовой пластине, на которой была установлен пищалка, я просверлил отверстие и вклеил пищалку в него. Саму пищалку я заменил на более громкую, рассчитанную на питание от 3.3В. Так как выход для звука пищалки, в новом ее месте расположения не предусмотрен, то как раз повышенная громкость
будет компенсировать этот момент.
Ну и осталось самое сложное - прорезать отверстие в корпусе пульта под miniSD карту.
После записи на карточку голосовых команд и обновления прошивке в пульте, он заговорил!
Если вдруг вам надоест говорящий пульт, то в настройках аппаратуры всегда можно выключить громкость голосовых команд, при этом начнет работать привычная пищалка и вибрация.



Продолжая тему квадрокоптеров на самодельных рамах, хочу рассказать о втором варианте своей рамы с диагональю 120мм
Так же, как и первый вариант 120 рамы, о котором можно почитать тут rcopen.com/blogs/198531/22964, вторая версия имеет правильную 120мм диагональ, и схожий форм-фактор в виде “автобуса” с верхним расположением аккумулятора.
Однако сама конструкция новой рамы немного другая.
Рама выполнена из карбона. Толщина основной пластины 3мм!
Пластина под аккумулятором толщиной 1.5мм, а толщина боковин 2мм.
Конструкция получилась довольно красивая, но не легкая, тяжелее рамы первой версии.
Вес рамы в сборе составил 28г. Длинна рамы получилась 115мм.
За красоту пришлось заплатит лишними 4 граммами, однако я думаю это все компенсируют хорошие комплектующие, о которых я расскажу ниже.
Данная конструкция рамы исключает попадания в кадр различных крепежных элементов и пропеллеров, что не может не радовать.
Рама так же проектировалась под электронику с крепежом 20*20мм, однако предусмотрена возможность разных вариантов сборки, на разных компонентах, за счет возможности перемещать крепеж электроники в пазах рамы.
Для сборки рамы используются стоики М2. Между нижней пластиной и пластиной под аккумулятор высота стоек составляет 8мм, а поперечные стойки длинной 22мм.
Предусмотрена возможность установки в раму современные микрокамеры, типа RunCam Micro Swift.
Конструктивно раму можно разделить на 2 части, нижняя пластина и верхняя часть. Все компоненты квадрокоптера, кроме разъема питания, будут крепится на нижнюю пластину. Это позволит легко и быстро разбирать раму при необходимости.
Верхняя часть рамы состоит из трех основных элементов: пластина под аккумулятор и две боковые пластины.
Все элементы собраны через пазы и стянуты алюминиевыми стойками.
Рама в сборе получилась довольно жесткой.
По комплектации получилось следующее.
Моторы - EMAX RS1106 на 6000kV www.gearbest.com/motor/pp_684329.html
Регуляторы - Hakrc 20A Blheli_S 4 в 1 www.gearbest.com/esc/pp_1056030.html
Полетный контроллер - Omnibus F4 NANO STM32F405 с быстрым гироскопом ICM 20608 www.gearbest.com/…/pp_1040415.html
Приемник - Frsky R-XSR horusrc.com/…/frsky-r-xsr-ultra-mini-redundancy-re…
Передатчик - DYS MI200 banggood.com/DYS-MI200MW-Pigtail-VTX25mW200mW-Swit…
Камера - FuriBee MS - 1672 www.gearbest.com/camera/pp_775692.html
Пропеллеры - 2.5" Gemfan Flash 2540 www.gearbest.com/propeller/pp_1199435.html
Светодиоды - AURORA Mini Programmable LED www.gearbest.com/…/pp_630102.html
Полетный контроллер я установил в раму через резиновые демпфера, предварительно рассверлив крепежные отверстия на плате контроллера до 3мм. Все это я сделал для того, чтобы снизить пагубный эффект от вибраций, которые могут передаваться от рамы полетному контроллеру.
Однако Гироскоп ICM 20608 оказался вполне вменяемым в плане чувствительности к вибрациям, в отличии допустим от ICM20689, который нужно крепить только на очень мягкую пенку на двухстороннем скотче. Сам полетник мне тоже понравился, хороший мощный ВЕС на борту и достаточное количество UART портов.
К работе Регуляторов скорости также претензий нет, все работает отлично.
Очень понравился приемник Frsky R-XSR. Очень компактный и легкий и при этом передает телеметрию и имеет очень хороший прием!!!
Для уменьшение его и без того скромных габаритов, я отпаял от него разъем.
Отдельно хочу рассказать о передатчике DYS MI200
Данный передатчик вполне бюджетный и имеет некоторые особенности.
Из плюсом могу отметить наличие на борту микрофона!!! Эта особенность была решающей при выборе этого передатчика, так как я люблю летать со звуком!
Также есть возможность управлять передатчиком дистанционно с пульта, но к сожалению, только чрез PPM.
Передатчик имеет одну кнопку управления и работает очень хорошо!
Но, а самая главная особенность этого передатчика - это выходная мощность. На выбор есть два режима 25мВт и 200мВт.
В режиме 25мВт передатчик выдает честные 25мВт, в среднем по всем каналам. Однако в режиме 200мВт, передатчик жарит на все(деньги) 600- 800мВт,
в зависимости от канала передачи! А соответственно при таких мощностях передатчик будет потреблять не малый ток.
И вот тут как раз мы вспоминаем про хороший, мощный ВЕС на полетнике, который отлично справился с задачей питания камеры, передатчика, приемника и светодиодов!!!
До этого данный передатчик стоял на другом квадрокоптере, с другим полетным контроллером, у которого был слабый ВЕС, так вот в режиме работы передатчика 25мВт коптер летал отлично, но как только я переключался на 200мВт (которые на самом деле 600-800) коптер начинал сходит с ума. Не справлялся слабый ВЕС и полетнику не хватало питания, коптер постоянно подергивало!
В этот раз крепежные элементы я решил не распечатывать, а сделать самому. Крепеж для разъема питания я выточив из черного АВС пластика.
Силовой разъем ХТ30 вклеен в крепежный элемент, и крепится к боковинам и к нижней части рамы саморезами.
Скоба под камеру также изготовлена мною из АВС пластика, и крепится к нижней пластине на 2 нейлоновых болтика М2.
К работе камеры претензий у меня нет. Несмотря на то, что это клон, качество картинки на уровне. Единственное что я сделал это залил контакты матрицы
эпоксидным клеем, чтобы при сильных крашах матрица не оторвалась от платы.
Корпус камеры был оранжевого цвета, поэтому временно пришлось его покрасить черным маркером, в будущем перекрашу его чем-то более стойким.
Так же хочу отметить что, узнав цену на камеру Foxeer Arrow Micro, я понял, что смысла в покупки клонов нет никакого.
Моторы EMAX RS1106 очень порадовали хорошей тягой и грамотным конструктивом! Вал моторов имеет диаметр 2мм под подшипники, и выход 1.5мм под пропеллер.
Однако качество самих подшипником не самое лучшее. Моторы хоть и новые, сбалансированные, но шумноваты. Возможно еще разработаются.
Для более аккуратной сборки силовые провода на моторах я заменил одножильными лакированными проводами. Сами провода защитил термоусадкой. Получилось боле аккуратный и тонкий выходной провод, а сечение провода получилось больше чем было.
Больше всего из комплектующих мне понравились пропеллеры Gemfan Flash 2540. Очень советую всем летающим на 2.5" попробовать эти пропы!!! Очень тихие и эффективные!
Ну а полностью собранный коптер имеет следующий внешний вид:
Передняя поперечная стойка, соединяющая боковины, служит также общим крепежным элементом всей верхней части рамы и нижней пластины.
К нижней пластине, стойка крепится двумя болтами М2. Для этого, в торце стойки просверлены отверстия и нарезана соответствующая резьба.
В задней части квадрокоптера я добавил светодиоды. Для этого выгнул пластиковый уголок, приклеил к нему платку со светодиодами, и зафиксировал пластиковый уголок снизу рамы саморезом, который удерживает силовой разъем.
Конечный результат меня более чем порадовал, начиная от внешнего вида и заканчивая летными качествами.
Вес коптера без аккумулятора составил 92г. Полетный же вес, с аккумулятором 3S на 450мАч, получился 134г.
Ну а готовый к полету коптер выглядит вот так:
После долгого перерыва, наконец удалось собрать финальную версию RX120-2S, напечатанного вертолета 120 размера с питанием от 2S аккумулятора.
Сборка данной версии вертолета растянулась на 3 этапа, поэтому, тем, кто этого не знает, рекомендую ознакомится с предыдущими двумя частями этой истории.
Начну с общего вида, вертолет внешне практически не изменился, лишь немного удлинился хвостовой плавник.
Однако под канопой перемены более заметны. Самым главные изменения коснулись рамы.
Раму я переработал под использование полетного контроллера Align 150GRS. Для упрощения сборки элеваторный сервопривод поменялся местами с основным двигателем. Сделано это было для того чтобы сервопривод работал в правильном направлении, и его не пришлось бы реверсировать.
По мимо этого, я изменил переднюю часть рамы, в которую непосредственно устанавливался полетный контроллер и регуляторы скорости. Стек из полетного контроллера и регуляторов скорости, установленный в специальном углублении рамы, будет более защищен, а внешний вид собранного вертолета стал более лаконичным.
Так же была переработана верхняя часть рамы - держатель сервоприводов. Я немного изменил его дизайн, но функционал его остался прежним.
Все комплектующие из предыдущей сборки я установил на новую раму. Начал со сборки хвоста.
Установил хвостовой двигатель, приводной вал, пропеллер и шестеренки.
Хвост собрался легко и не принужденно, так как качество печати последних двух партий рам было на высоте.
Не пришлось долго калибровать посадочные отверстия под хвостовую балку и выставлять соосность приводного вала.
После сборки хвоста, также без особых приключений установил все остальные компоненты вертолета на раму. Единственное пришлось немного повозится с удлинением проводов основного двигателя, и прокладкой проводов от хвостового двигателя.
По мимо этого, я немного модифицировал стек полетного контроллера и регуляторов скорости, сделав его немного ниже по высоте.
Для этого, с платы регуляторов, я выпаял большой керамический конденсатор, и перенес его на разъем питания. Это позволило опустить плату полетного контроллера ближе к плате регуляторов и уменьшить высоту всего стека. Эта процедура вовсе не обязательна, но так как после предыдущей сборки, мне пришлось вновь спаивать вместе полетный контроллер и регуляторы скорости в один стек, я решил проделать эту операцию по уменьшению высоты стека.
Вся остальная механика осталась без изменений и была установлена на свои места.
Вес вертолета без аккумулятора составил 53.2г, полетный же вес с аккумулятором на 330мАч вышел 71.9г.
Для наглядности сделал фото всех деталей из которых состоит вертолет в разобранном виде.
Голову разбирать не стал, но я думаю, что и так получилось интересно.
Ну и как обычно, в завершении, групповое фото всех моих моделей, RX100, RX80, RX120-2s, RX120.
Погода на улице к сожалению не летная совсем, поэтому видео полетов будет немного позже.
Ну а фото в нормальном разрешении можно посмотреть тут:
www.rcgroups.com/forums/showpost.php?p=38865046&po…
Аппаратура управления Devo 10, уже не первый год, служит мне для управления всеми моими моделями. Претензий к её работе у меня не было.
функционал передатчика меня вполне устраивал, а после установки в данную аппаратуру мульти-модуля, и вовсе перекрыл все мои потребности.
Я не буду долго рассказывать о плюсах и минусах данного передатчика, скажу лишь, что он вполне стоит своих денег, а его возможности достаточно обширны.
Но не что не может работать вечно.
Само слабое место большинства аппаратур управление - это стики. А точнее потенциометры в стиках, которые и передают изменения управляющего сигнала.
Потенциометры имеют свойство изнашиваться, так как являются “контактным” устройством.
Со временем, резистивный слой в них разрушается, и они уже не могут точно передавать сигналы управления. Из-за этого, в нулевых положениях стиках, появляется так называемый “дребезг”. Передаваемые значение постоянно меняются, в небольшом пределе. Все это пагубно влияет на управляемость модели.
За годы пользования потенциометры в моем передатчике также износились.
И я решил исправить это кардинальным способом, заменив потенциометры датчиками Холла.
Благодаря советам Александра Кузнецова, в блоге которого вы сможете найти много полезного mcheli.blogspot.ca, я купил датчики OH49E
ru.aliexpress.com/item/…/1903819684.html
Датчики довольно мелкие и стоят очень дешево.
Однако для работы датчика нужно магнитное поле, поэтому мне понадобились магниты.
Магниты нужны довольно нестандартные. Нестандартность заключается в виде намагниченности.
Для переделки необходимы кольцевые магниты с диаметральной намагниченностью.
Размеры кольца должны быть в пределах 8-10мм наружного диаметра, 3- 3.5мм внутреннего диаметра и по ширине порядка 3-4мм
На просторах алиэкспресса полно магнитов, размеры которых подходят под необходимые условия, однако все они аксиальной намагниченности,
а нам нужны диаметрально намагниченные магниты, найти их оказалось не просто. В китайских магазинах я их не нашел, однако нашел их по месту.
…org.ua/magnit_kolco_8_3x4_mm_dn-info.html
Ну а после того как у меня появились датчики и магниты нужно было придумать как красиво, аккуратно и главное обратимо, заменить потенциометры на датчики Холла и магниты.
Всю операцию замены можно разделить на 2 части.
Установка магнитов в стики, на место потенциометров, и установка датчиков Холла над магнитами.
Начнем с магнитов.
Магнитные кольца я решил установить в стик по такому же принципу, по которому стояли в нем потенциометры.
Вал потенциометра входил в стик на шлицевом соединении, и вращался вмести со стиком. Магниты я так же решил установить на вал со шлицами.
В роли вала отлично подошел нейлоновый болт с резьбой М3. Однако нужно было как-то закрепит магнит на валу. По мимо этого еще нужно было сделать утолщение на валу, такое же как было на выходе вала потенциометра. Я решил объединить утолщение на валу и фиксирующую гайку для магнитов в один элемент.
Утолщение на валу должно быть 5мм в диаметре, и тут идеально подошли алюминиевые стоки с резьбой М3.
Они имели нужный наружный диаметр и резьбу, с помощью которой можно зафиксировать магнит.
Из алюминиевой стойки я нарезал 4 кусочка, которые послужили фиксаторами магнитов и утолщением на валу.
Алюминиевую стойку я нарезал на кусочки нужной длинны в прямом смысли. Для этого использовал скальпель.
Разметив стойку на 4 части, я разрезал ее скальпелем.
Уже давно я режу скальпелем алюминиевые стойки, но только чуть меньшего диаметра, под резьбу М2, они очень легко режутся и это гораздо легче и быстрее чем распиливать их. Поэтому я решил и стойку под резьбу М3 также разрезать скальпелем. Тут дело оказалось не таким простым, пришлось задействовать маленький молоток, однако все получилось, при этом не один скальпель не пострадал.
Дальше я обработал торцы получившихся кусочков, доведя их размер до 4.7мм, а также снял фаску с одно стороны.
После, я одел на нейлоновые болты магниты, и закрепил их получившимися гайками из алюминиевой стойки.
Для плотной посадки магнитов, я одел на болты небольшие кусочки термоусадки, которая обеспечила плотность посадки и точность ориентации магнитов на валу.
На нейлоновых болтах я нарезал шлицы, для того чтобы установить их в стик, вместо валов потенциометров.
Я долго думал, как закрепить вал с магнитом внутри стика, и решил, что плотной посадки вала в стик будет достаточно. Поэтому шлицы на болтах я срезал с запасом, так чтобы они плотно входили в корпус стика.
После того как вопрос по установке магнитов был решен, я взялся за датчики Холла.
Тут все оказалось не так просто.
Датчики реагируют на изменения магнитного поля и в соответствии изменениям меняют свою проводимость. То есть датчики ведут себя подобно потенциометрам, только работают бесконтактно. Это обуславливает их надежность и гораздо больший срок службы, по сравнению с потенциометрами.
Самой большой сложностью оказалось определить расстояние, на котором датчики должны находиться от магнитов.
Если расположить датчик слишком близко к магниту, то на выходе из датчика, мы получим экспоненциально меняющийся сигнал. Но лишние экспоненты в работе стиков мне не нужны.
Слишком большое расстояние между магнитом и датчиком снижает уровень максимального и минимального отклонения сигнала, и соответственно снижает разрешающую способность датчика.
Опытным путем я выяснил, что в моем случае, расстояние между датчиком и магнитом в 2 мм будет оптимальным.
Дальше осталось придумать как закрепить сам датчик над магнитом.
Крепление я сделал из монтажного текстолита.
Вырезал пластины нужной формы и припаял к ним датчики. Для красоты окрасил текстолит черным маркером. Крепежные отверстия в пластинах сделал продолговатой формы, для того чтобы обеспечить возможность регулировки расстояния между магнитом и датчиком Холла.
Сами пластины крепятся к стику в местах где раньше крепились потенциометры. Осталось только припаять провода, выставит правильное положение магнита в стиках и нужный зазор между датчиками и магнитами.
С проводами не возникло никакой сложности, все получилось довольно красиво, с выставлением зазора также все оказалось просто, а вот с положениями магнитов пришлось немного повозится.
Расположение магнитов относительно датчика должно быть таким, чтобы ось намагничивания была строго перпендикулярно датчику.
Узнать где находится эта ось довольно просто. Нужно примагнитить одно магнитное кольцо к другому, торцами друг к другу. Они примагнитятся строго по полюсам. Кольца можно провернуть, и они примагнитятся другими полюсами. В местах соединения колец можно поставит метки, это будут полюса магнитов. А ось намагничивания будет проходить между двумя полюсами.
Соответственно, после определения положения оси намагничивания, мы фиксируем положение магнита на валу таким образом, чтобы эта ось была перпендикулярно датчику.
Найти правильное положение магнитов с первого раза не получится. Для определения точного положения необходимо подключить стики к пульту.
На датчики Холла будет подаваться напряжение. В случае с Devo 10 это напряжение составляет 3.26V. В центральном положении стиков, на выходе датчика должна быть половина от подаваемого на него напряжения. В моем случае эта величина должна быть 1.63V. Путем проб и ошибок, выставляем положения магнита на валу таким образом, чтобы величина напряжения на выходе из датчика, в нулевом положении стика, была близкой или равной половине входного напряжения.
Дальше осталось откалибровать стики и пульт управления готов.
После калибровки, стики на датчиках Холла заработали вполне привычно. Погода у нас не летная, поэтому пришлось полетать по дому на старом добром V911. Реакция модели на ход стиков не изменилась, однако теперь нет “дребезга” сигнала в нулевой зоне. Другие мои модели также отлично управляются новыми стиками, все работает стабильно, и что самое главное бесконтактно!)
Я полагаю, что подобным образом можно переделать стики в любой радиоаппаратуре управления и пользоваться ей, не думая о ресурсе потенциометров.
Фотографии в нормальном разрешении можно посмотреть тут.
www.rcgroups.com/forums/showpost.php?p=38953575&po…
Продолжаю рассказ о квадрокоптере, на раме Armattan Chameleon.
В предыдущей части rcopen.com/blogs/198531/22892 я сделал обзор рамы, а теперь пришло время поведать о сборке.
Как я уже писал, рама красивая и интересная, но не лишена недостатков, и я попытался их устранить.
Начал я с самого главного, на мой взгляд, недостатка, а именно конструкции передней части рамы. Она хоть и выглядит массивно, но сломать или погнуть алюминиевые части не так и сложно. А все потому, что две алюминиевые боковины, которые защищают курсовую камеру и формируют площадку под экшен-камеру, связаны между собой довольно слабо. Я решил внести в конструкцию дополнительные связующие элементы в виде алюминиевых стоек, длинной 20мм, под резьбу М3.
Использовал две стойки черного цвета, и установил одну сверху, как раз над курсовой камерой, а вторую снизу под курсовой камерой.
Я решил не вносить какие-либо изменения в оригинальные части рамы, а поэтому для крепежа стоек использовал удлиненные модифицированные болты.
Это позволило сохранить алюминиевые боковины рамы, без изменений, но при этом очень жестко связать их между собой.
Болты я обточил при помощи бормашины, убрав с них часть резьбы, что позволило фиксировать болты только в стойках, плотно прижимая к ним боковины передней части рамы.
Ну а дальше я установил в раму все необходимые компоненты.
В роли курсовой камеры я использовал FOXEER Arrow V3
banggood.com/FOXEER-Arrow-V3-2_5mm-600TVL-HAD-II-C…
С установкой камеры не все вышло гладко. На корпусе камеры есть небольшие выступы, по бокам, как раз в местах крепежных отверстий. Оказалось, что при заказе, была возможность выбора типа боковин рамы, к которым крепится камера. Есть вариант под стандартное крепление, с одним отверстием в камер, а есть вариант с креплением для камер с тремя отверстиями. Я не увидел этого, и заказал стандартный вариант боковин рамы, под одно отверстие, поэтому пришлось немного подрезать резиновые вставки, к которым крепится камера, для нормальной ее установки. Но с другой стороны, это оказалось плюсом, так как камера у меня прикреплена не жестко к карбоновым боковинам рамы, а соединена с ними через резиновые вставки.
Дальше я установил приемник.
Я использовал приемник Frsky XSR-E
banggood.com/Original-FrskyEACHINE-15x15mm-XSR-E-D…
Приемник довольно компактный, но я, все-таки, решили не искать легких путей, а установить приемник в самом неожиданном месте. И как оказалось в последствии - это было верное решение.
Установил я приемник между двумя алюминиевыми боковинами рамы.
Для этого я изготовил планку переходник, из черного текстолита, при помощи которой закрепил приемник к боковинам рамы.
Сама планка прикручена снизу к алюминиевым частям рамы болтиками М2, а снизу к ней прикручен приемник, который как раз четко поместился между двух боковин.
На виде сверху можно увидеть передатчик, полетный контроллер и приемник.
Под полетным контроллером находится регуляторы, под передатчиком проходят силовые провода.
До начала сборки я думал, что в раме у меня останется очень много свободного места и как можно видеть, свободного пространства в раме не осталось, так что место для приемника я выбрал удачное.
В качестве полетного контроллера я выбрал Holybro Kakute F4
banggood.com/Holybro-Kakute-F4-STM32F405-Flight-Co….
Полетный контроллер на базе процессора F4 и с быстрыми гироскопами ICM20689.
На борту собственный стабилизатор напряжения, что позволяет питать полетник напрямую от батареи.
Чип гироскопом вынесен на шлейфе и крепится к плате через очень мягкий двухсторонний скотч. Сделано это не зря, так как гироскоп ICM20689 очень чувствительный к вибрациям. Менять оригинальный скотч на какой-либо боле жесткий я не рекомендую, сразу же получите неадекватное поведение квадрокоптера.
В целом полетный контроллер сделан довольно качественно и продуманно. Из недостатков могу отметить нехватку UART портов. Для подключения управляющего сигнала с передатчика к полетному контроллеру, пришлось задействовать SOFTSERIAL и выход под мотор, предварительно ремапнув его.
Самая большая проблема, которую я пока не смог решить до конца - это небольшие помехи на видео. Возможно какая-то “несовместимость” OSD в полетнике с передатчиком, или камерой, или еще что-то.
Под полетным контроллером находятся регуляторы.
Это X-Racer Quadrant 2-6S 35A 32Bit BLHeli_32
fpvmodel.com/x-racer-quadrant-2-6s-35a-32bit-blhel…
32 битные регуляторы, мне понравились. Выполнены качественно и отлично собираются в модуль 4 в 1. При этом всегда есть возможность их распаять по одному, при необходимости. Для сборки в модуль 4 в 1 я рекомендую слегка обработать торцы регуляторов при помощи надфиля, убрав излишки текстолита.
Спаивать регуляторы вместе удобнее установив их на раму и зафиксировав болтами.
Регуляторы имеют датчики тока и отлично передают телеметрию полетному контроллеру. Для этого необходимо подпаять к каждому регулятору провод на пин TX, после спаять эти провода в один сигнальный провод и подключить его к полетному контроллеру, на свободный UART порт к пину RX. Показания тока c регуляторов я вывел через OSD.
С видео передатчиком я долго думал и решил взять новый Matek 5.8G 40CH 25/200/500mW
banggood.com/Matek-5_8G-40CH-25200500mW-switchable…
Передатчик порадовал своим богатым функционалом, а также конструкцией, размерами и наличием крепежных отверстий.
Выполнен довольно качественно. Имеет собственный стабилизатор напряжения и может питаться напрямую от батареи. Управление передатчиком очень удобное и понятное, при помощи двух кнопок и ряда светодиодов. Также есть полноценное управление передатчиком при помощи полетного контроллера, через OSD, но честно сказать, при наличии удобных физических кнопок и понятной индикации, лезть в OSD не сильно хочется.
Передатчик я установил на две стойки, которые держат полетник и регуляторы, но установил не над полетником, а сбоку от него на таком же уровне.
Для этого я изготовил два переходника из текстолита, представляющие собой короткие пластики с двумя отверстиями под болт М3.
Сами переходники зафиксировал нейлоновыми болтами к передатчику, а дальше всю конструкцию установил над полетником и зафиксировал все нейлоновыми стойками.
В роли передающей антенны я установил Realacc Pagoda
banggood.com/Realacc-Pagoda-Antenna-6_5cm-65mm-5_8…
Антенна компактная, крепкая и не сильно тяжелая.
Для нормальной работы регуляторов на протоколе DSHOT 1200 установил в цепь питания конденсатор на 1000мкФ 35в.
Конденсатор пришлось прикрепить стяжками к силовым проводам.
В роли силовых проводов я использовал провод 12AWG. Провода очень толстые и было довольно сложно нормально уложить их в раме.
Разъем питания я решил установить красивого черного цвета с защитными крышками в задней части Amass XT60H
banggood.com/10-Pairs-Amass-XT60H-Plug-Connector-B…
Такие же разъемы я установил на всех аккумуляторах. Выглядят они красиво и аккуратно и удобно размыкаются.
С моторами я решил немного рискнуть и попробовать новые не дороги двигатели AOKFLY RV2306 2400KV
banggood.com/AOKFLY-RV2306-2306-2400KV-2650KV-CW-C…
Моторами я остался доволен, тянут отлично, имеют хороший конструктив, да и выполнены вполне хорошо.
Моторы имеют очень сильные и скругленный магниты, к балансировке нареканий нет. Длинные силовые провода оказались очень кстати.
Из недостатков моторов могу отметить укладку силовых проводов на выходе из двигателя. Они проходят как раз под двумя крепежными отверстиями.
Поэтому одну пару крепежных болтов нужно подбирать особо тщательно, так чтобы не пережать и не повредить выходные провода. Мне пришлось использовать болты М3*9мм со стороны выхода проводов, а с противоположной стороны можно спокойно установить болты М3*10мм и еще останется достаточно пространства между болтом и статором. Провода от моторов спрятал в плетенные пластиковые кембрики, и притянул их колечками из термоусадки к лучам.
Для защиты моторов я использовал пластиковую защиту KINGKONG
banggood.com/Kingkong-Universal-Motor-Cover-Protec…
Свою функцию она выполняет!
Весь пирог электроники я скрепил при помощи нейлоновых болтов и стоек.
Верхние стойки, которые стягивают все элементы, я сделал специально длинными.
Причем такой длинны, чтобы они как раз доходили до уровня верхней пластины, на который крепится аккумулятор.
Таким образом я устранил недостаточную, на мой взгляд, жесткость верхней пластины. Теперь она упирается в пластиковые стойки и не сможет прогнутся вниз и сломаться, потянув за собой алюминиевые части и не сможет повредить электронику.
Ну а в полетном виде квадрокоптер выглядит так.
В качестве аккумуляторов я использую Tattu R-Line 1550mAh 95C
flymod.net/item/tattu_r-line_1550mah_95c_4s1p
Квадрокоптер получился довольно увесистым, но это скорее плюс, чем минус для фристайла.
После мелких квадрокоптеров летать на большом очень не привычно, но интересно.
Сегодня будет небольшое продолжение предыдущей статьи rcopen.com/blogs/198531/22702 про, напечатанный вертолет 120 размера с питанием от 2S аккумулятора, поэтому для начала рекомендую ознакомится с ней.
Как я уже писал, главой проблемой у пробной версии была нестабильная работа хвоста. Корень данной проблемы находился в полетном контроллере, и решить ее не меня полетный контроллер у меня не получилось.
Поэтому я решил использовать полетный контроллер, а за одно и регуляторы, от относительно нового вертолета Align 150X. Все это вместе называется 150GRS Flybarless System Set и представляет собой палату регуляторов, полетного контролера и приемника, соединенные вместе.
Однако мне пришлось немного разъединить данный комплект для установки его на вертолет. Я отпаял регуляторы и прикрепил их снизу рамы, а полетный контроллер с приемником остались на своём привычном месте, сверху.
Полетный контроллер и регулятор скорости очень порадовали своим компактным размером и небольшим весом.
Ну а самый главным плюсом 150GRS является возможность его настраивать!!! Для этого есть мобильное приложение, при установки которого на мобильное устройство, вы может связаться с полетным контроллером через bluetooth, и настроить огромное количество параметров полета и работы бесфлайбарной системы, в том числе все параметры, которые отвечают за работу хвоста.
Благодаря данной возможности я без труда сумел настроить хвост и вертолет полетел! Я уменьшил параметр гейн для хвостового мотора и хвоста стал вести себя стабильно. Также подрегулировал остальные параметры и добился четкой и быстрой реакции хвоста на стик.
Однако, как говорится все хорошо быть не может, и тут не обошлось без неожиданных сюрпризов.
Полетный контроллер 150GRS рассчитан на определенное передаточное число механики вертолета. То есть соотношение передаваемого сервоприводами поступательного движения с конечным углом отклонения лопастей. И к моему огорчению данное передаточное число никак не совпадало с передаточным числом механики вертолета V977/K110/K120, которую я использовал в своем вертолете, оно оказалось слишком малым.
В частности, отличия были в длине рычагов цапф, в длине рычагов самих сервоприводов и максимальным углом отклонения сервоприводов. 150GRS оперирует гораздо меньшим ходом сервоприводов, чем полетные контроллеры от V977/K110/K120, поэтому и ход качалок гораздо меньше. А соответственно и угол отклонения лопастей будет меньше. Поэтому при первом полете я был рад тому что хвост заработал нормально, но разочарован тем, что вертолет оказался очень вялым, из-за неподходящей механики. Самым простым вариантом было использовать оригинальную механику вертолета Align 150X, но я пошел другим путем.
Я решил изменить существующую механику вертолета так, чтобы ее передаточное число стало выше. Для этого мне пришлось заменить цапфы.
Вместо металлических цапф от вертолета V977/K110/K120, я установил металлические DFC цапфы от вертолета V931/K123/K124.
Данные цапфы имеют более короткий рычаг, и соответственно более высокое передаточное число.
для их установки мне пришлось немного доработать хаб. Я откусил направляющие для линков, и аккуратно сточил, токарным способом, то что от них осталось.
Хаб получился красивый и аккуратный, как будто таким и был.
Изменения механики очень положительно сказались на полете. Вертолет ожил, стал бодрым, как и положено!
Помимо изменений в механики мне пришлось реверсировать элеваторный сервопривод, для того, чтобы он верно отрабатывал сигналы от полетного контроллера.
В финальной версии я планирую избавится от реверсированного сервопривода, для упрощения сборки. Для этого придется поменять местами основной двигатель и элеваторный сервопривод. На полете это никак не отразится, а сборка вертолета станет проще.
Я уже скорректировал положения двигателя и элеваторного сервопривода в 3D модели рамы, осталось только распечатать ее и собрать финальную версию!
Все остальные компоненты вертолета не изменились, поэтому тут я о них рассказывать не буду.
Ну и к своему рассказу прилагаю небольшое видео полета.
P.S.
фото в нормальном разрешении можно глянуть тут
www.rcgroups.com/forums/showpost.php?p=38217266&po…
Сегодня будет рассказ про квадрокоптер, раму для которого я спроектировал сам.
Итак - это маленький квадрокоптер с диагональю 120мм в правильном иксе, под пропеллеры 2.5 дюйма.
Данный коптер я сделал по мотивам своего первого квадрокоптера, rcopen.com/blogs/198531/22089 который отлично выполнил свою функцию по обучению, и был много раз разбит и восстановлен, что в сою очередь мне изрядно надоело) Поэтому я решил создать свою раму, которая была бы гораздо крепче, и в том виде, в котором я ее себе представляю.
Рама получилась с довольно приятным внешним видом и очень крепкая, и жесткая.
Мне нравятся заниженные рамы, поэтому свою раму я сделал именно в таком форм-факторе.
У данного решения есть свои достоинства и недостатки, но рассуждать они них я здесь не буду, а расскажу о получившемся результате.
Как можно видеть, рама выполнена из карбона. Толщина основной пластины 3мм!!! Это довольно много для 120 диагонали, и можно было сделать основание из пластины 2.5мм, но я решил сделать упор на прочность рамы, поэтому не стал экономить на весе.
Пластина под аккумулятором толщиной 1.5мм, а пластина над камерой толщиной 2мм.
Итоговый вес карбона вышел 19,7г. Вес рамы в сборе 23.9г. Вес не маленький, но зато с прочностью проблем думаю не возникнет.
Длинна рамы составляет 110мм
Рама рассчитана под электронику с крепежом 20*20мм, однако предусмотрена возможность разных вариантов сборки, на разных компонентах, за счет возможности перемещать крепеж электроники в пазах рамы.
Для сборки рамы используются стоики М2. Между нижней пластиной и пластиной под аккумулятор высота стоек составляет 9мм, а передние стойки по высоте 20мм.
Предусмотрена возможность установки в раму современные микрокамеры, типа RunCam Micro Swift. Для это необходимо установить передние стойки высотой 22мм.
В общем высоту стоек можно варьировать в зависимости от комплектующих на которых собирается квадрокоптер.
Данный коптер я собрал далеко не на самых современных комплектующих. Просто перекинул все компоненты со старого квадрокоптера на новую раму.
Заменил только передатчик, и то временною. Вскоре он будет так же заменен, потому как я привык летать со звуком, а данный передатчик его не передает.
По комплектации получилось следующее.
Моторы - DYS BE1104 на 7000kV (на самом деле эти моторы 1105)
Регуляторы - Racerstar RS12A V2
Полетный контроллер - Furious PIKO BLX
OSD - Minim OSD
Приемник - Frsky XM+
Передатчик - Eachine VTX03
Камера - Микрокамера на 120 градусов
Пропеллеры - 2.5"
На данный момент, это не особо актуальная комплектация, которая будет обновляться по мере возможности.
Как я уже говорил, первым дело хочу заменить передатчик VTX03 на ATX03, для того чтобы слышать звук. Также хочу заменить камеру на RunCam Micro Swift, и полетник с регуляторами. К регуляторам у меня претензий нет, но все-таки, современные 4 в 1 будет более компактные и легкие. А вот полетник хочется со встроенным OSD, для того чтобы убрать Minim OSD, которое занимает много места. Это позволит опустить пластину под аккумулятор еще ниже и сделать сборку еще боле компактной.
Как вы можете заменить, пищалка расположена над камерой и вклеена непосредственна в верхнюю пластину.
Снизу нижней пластины, на лучах, я приклеил мягкие поролоновые ножки, который купил в строительном магазине.
Крепление камеры я также спроектировал сам и распечатал его на 3Д принтере, из обычного ABS пластика.
Скоба крепления крепится к раме через демпферы. Демпферы я сделал из силиконовой оплетки провода 18AWG.
На камеру одевается крепежное кольцо, которое фиксируется в скобе при помощи 2 маленьких шурупов.
Камера может отклонятся на довольно большой угол, при этом крепеж через демпферы позволяет избавится от вибраций.
Еще одним элементом, который я придумал и распечатал, является держатель разъема ХТ30.
Мне очень понравилось расположение разъема питания, который жестко закреплен в задней части коптера. В первом своем квадрокоптере я приклеил разъем ХТ30 к нижней части рамы. Это решение оказалось довольно удобным. В своей же раме я решил сделать еще красивее и перенес разъем питание внутрь рамы.
К сожалению, я не нашел разъемов ХТ30 с возможностью бокового крепежа, поэтому пришлось придумывать крепеж самому.
Сам разъем ХТ30 вклеивается непосредственно в элемент крепежа и становится с ним одним целым. Ну а дальше все это уже крепится к верхней пластине при помощи двух болтов М2. Сам разъем я немного укоротил по длине, для того чтобы он не мешал сборки.
Итоговый вес коптера, без аккумулятора получился 76г.
В полетном виде коптер выглядит вот так и имеет полетный вес 117г. с аккумулятором 3S 450mAh.
По мимо данной рамы, я спроектировали и отфрезеровал еще одни вариант рамы, так же с диагональю 120мм, на которую я планирую установить современные и мощные комплектующие, но это уже совсем другая история.
UPDATE 20.01.18
Обновил комплектующие.
Регуляторы - BS-28A 4in1 2-4S BLHELI_S ESC banggood.com/20x20mm-BS-28A-4in1-2-4S-BLHELI_S-ESC…
Полетный контроллер - Omnibus STM32F4 F4 banggood.com/Micro-20x20mm-Betaflight-Omnibus-STM3…
Приемник - Frsky R-XSR horusrc.com/…/frsky-r-xsr-ultra-mini-redundancy-re…
Передатчик - EWRF-e7082TM banggood.com/EWRF-e7082TM-5_8G-48CH-25100200mW-Swi…
Камера - Foxeer Arrow Micro V2 surveilzone.com/Foxeer-Arrow-Micro-FPV-Camera-Buil…
Пропеллеры - 2.5" Gemfan Flash 2540 www.gearbest.com/propeller/pp_1199435.html
Светодиоды - AURORA RC WS2812B RGB5050 Mini Programmable LED www.gearbest.com/…/pp_630102.html
Практически все новые комплектующие очень порадовали. Претензии есть только к полетнику.
Во первых, слабый ВЕС. Пришлось ставить передатчик со своим ВЕСом, так как ВЕС полетника не справлялся и коптер начинало подергивать.
Во вторых, не разведено на палате два UART порта, хотя в прошивке они есть. Пришлось подпаивать smart audio управление передатчиком, непосредственно к ноге процессора. Затея не простая, но выполнимая.
Все остальные обновки очень рекомендую к применению!
По весу новая сборка получилась 80г
И так, наконец-то дошла очередь и до финальной версии самого маленького в мире пилотажного вертолета на бесколлекторных двигателях, с приводом хвостового ротора чрез вал.
О пробной версии можно почитать в предыдущей части rcopen.com/blogs/198531/22320
Сборка финальной версии очень сильно растянулась по времени. Был еще один промежуточный вариант рамы, который я не стал собирать, так как к моменту получения печати я уже придумал более лучшую версию.
Как вы можете видеть вертолет приобрел нормальные, полноценные лыжи. Донором лыж стал вертолет HiSKY HCP80. Хрупкие лыжи были основной проблемой пробной версии и мне ее удалось довольно удачно решить.
Лыжи крепятся 3 саморезами к нижней части рамы.
Новая рама также претерпела изменений.
Сама рама стала короче на 4мм и легче на 0.5г. Некоторые элементы рамы стали тоньше. Элеваторный сервопривод поменялся местами с основным двигателем. Это было сделано для того чтобы в процессе сборке не нужно было реверсировать сам сервопривод, для корректной работы вертолета.
Ну и самое главное изменения в раме - это крепление хвостового двигателя. Точнее сказать отсутствие крепления.
В финальной версии я решил поступить с крепежом хвостового двигателя радикально, по принципу нет крепежа - нет проблем.
На рынке отсутствует двигатель типа-размера 1102 с подходящим мотормаунтом. В пробной версии я использовал двигатель НР02. Его мотормаунт также не подходит для нормальной установки в раму моей конструкции, и в пробной версии я довольно долго настраивал его положение для нормальной работы хвоста.
Поэтому, недолго думая, я решил интегрировать хвостовой двигатель непосредственно в раму.
Для этого я разобрал двигатель НР02, и установил в раму статор данного двигателя. Сам статор пришлось немного доработать. Отверстие в статоре под мотормаунт диаметром 5мм, а наружный диаметр подшипников двигателя 4мм. В итоге толщина стенки между подшипниками и статором получается 0.5мм. Этой толщины вполне хватало для алюминиевого мтормаунта, но для пластика этого мало. Поэтому я оставил толщину стенки 0.7мм в модели, а посадочное отверстие в статоре немного расточил.
Сам статор плотно вставляется в раму и зафиксирован бесцветным лаком. Также в раму были установлены 2 подшипника, хотя, наверное, можно было ограничится и одним.
Данное решение позволило укоротить размеры рамы, сделав ее более компактной, а также гораздо упростило настройку положения приводного вала для хвостового ротора.
По мимо рамы, в финальной версии, уменьшились габариты всех сервоприводов.
В пробной версии я укорачивал только элеваторный сервопривод, а в финальной версии я решил не мелочиться и уменьшил все сервоприводы.
Задняя крышка сервоприводов была сточена надфилем на 0,4мм, и переделана защелка на центральной части, под новый размер задней крышки.
Так же были уменьшены на 1мм по ширине качалки и укорочены выходные валы сервоприводов. В итоге габариты сервоприводов удалось уменьшить на 1.4мм.
Это в свою очередь позволило повысить плотность сборки и уменьшить габариты рамы.
В остальном же данная сборка повторяет сборку пробной версии, со всеми ее изменениями, за исключением того, что в данной сборки я установил полетный контроллер от вертолета WL V977, но это не меняет сути. Более подробное описание компонентов можно найти в предыдущей части
rcopen.com/blogs/198531/22320
Так же я немного скорректировал размеры и изменил форму хвостового кейса. Сделал его чуть толще и крепче.
В финальной версии этого вертолета я решил использовать скользящее соединение основной вал - основная шестерная.
Данное решение отлично себя зарекомендовала в старших моделях RX100 и RX120, и я внедрил его и в эту модель, так как с новым, боле мощным основным двигателем, основной вал со шлицем долго не продержался и разбился на кручение.
В основной шестерне я срезал шлиц и одел на нее бандаж, в роле которого выступила оправа от подшипника.
Сравнительные размеры трех финальных версий вертолетов RX80, RX100 и RX120.
Ну и пара групповых фото.
Финальная версия вертолета RX80 получила боле сбалансированный внешний вид, благодаря укороченной раме и лыжам меньшей высоты.
Сам вертолет стал на пару миллиметров ниже и красивее. Остальные габариты остались прежними.
Я планировал уменьшить вес финальной версии хотя бы на 1 грамм. Скажу сразу задача оказалась не простой.
Вес пробной версии с мотором HP03V2 составлял 29.9.
Финальная версия вертолета весит 29.2 г
Уменьшить вес финальной версии удалось на 0.7г, что довольно неплохо.
Летает вертолет довольно бодро и стабильно. Хвост работает даже лучше, чем у старших братьев.
В общем настало время осваивать комнатный пилотаж. А пока видео полета на улице.
Аккумуляторы с высокой токоотдачей долго не продержались и к сожалению утратили свою былую “славу”. Сейчас они работают также, как двухлетние аккумуляторы от V911 на 200мач. Так что с хорошими аккумуляторы вертолет будет еще пошустрее.
В видео вертолет летит на аккумуляторе от V911 которому уже больше 2 лет.
P.S
Фото в нормальном разрешении можно посмотреть тут
www.rcgroups.com/forums/showpost.php?p=37957012&po…
Сегодня будет не большой обзор рамы Chameleon от именитого производителя Armattan.
Chameleon это заниженная рама для квадрокоптера под 5 дюймовые пропы (есть версия и под 6 дюймов)
Рама заточена больше под фристайл, хотя погонять на ней конечно же тоже можно.
Диагональ рамы 220мм, а форма рамы является сплюснутым иксом, вписанным в прямоугольник примерно 173мм на 136мм.
Нижняя платина выполнена из 4мм карбона, пластина под аккумулятор из 2мм карбона, и пластина под экшен камеру из 1.5мм карбона.
Вес рамы, в том виде в котором вы можете видеть ее на фото, составляет 124.4г
Я не буду сильно вдаваться в технические характеристики, а расскажу о достоинствах и недостатках данной рамы.
Начнем с плюсов.
Рама очень красива! Дизайн действительно необычный и интересный.
Конечно же для полета этот факт не имеет значения, но для меня лично, и я думаю, что я не одинок, внешний вид коптера имеет очень важную роль.
Качество механической обработки всех элементов рамы на очень высоком уровне.
Качественный карбон. На фото можно рассмотреть торец нижней пластины. Как видно, карбон имеет слои угле ткани разной толщины. Я уверен это не с проста)
Довольно богатая комплектация имеет множество болтиков, стоечек, мягких накладочек, мягких ножек, резиновых колечек, наклеек и есть ремешок для аккумулятора.
Очень понравилось решение с крепежом курсовой камеры через резиновые проставки специальной формы. Я думаю, что эти проставки будут существенно спасть корпус камеры при жестких крашах и скорее всего буду служить легким софтмаунтом.
Возможность менять угол наклона площадки под экшен камеру также порадовала.
Ну и самый большой плюс данной рамы - это пожизненная гарантия от Armattan. Можно сказать, это самый главный и ключевой плюс, из-за которого я решил приобрести продукцию данной компании.
Ну а про недостатки рассказывать будем боле подробно
Начнем с цены в 95$, это никак не дешево, хотя конечно стоит оговорится о гарантии. Скажу сразу, что если бы не гарантия, то я бы не рассматривал данную раму в принципе. Уж очень много спорных моментов в ней на мой взгляд. С другой стороны, рынок переполнен иксобразными башенными рамами, а вот заниженных автобусных практически нет, и конкурентов у Chameleon соответственно не много в данном сегменте.
Следующим минусом я хочу отметить очень большое количество алюминия в конструкции. В этом плане я категорически не разделяю инженерной мысли разработчиков. Да оно конечно красиво, но с точки зрения прочности одни минусы.
Казалось бы, красивая алюминиевая передняя часть рамы, выглядит довольно мощно, но достаточно посмотреть во что она превращается после крашей и тут уже становится не до красоты.
На мой взгляд данная конструкция имеет ряд инженерных недочетов.
По сути мы имеем две боковые плоскости, которые в передней, самой уязвимой части, абсолютно ничем не связаны друг с другом.
При крашах данные алюминиевые боковины имеют свойства загибаться во внутрь, ломая при этом карбоновую пластину под аккумулятором и под экшен камерой, а также могут повредить нижнюю пластину.
Алюминиевые боковины связаны между собой лишь в задней части , в месте их крепления к карбону, и сверху при помощь тонкой карбоновой пластинки под экшен камеру. На мой взгляд этого совсем не достаточно, и конструкцию можно было бы сделать гораздо прочнее, при этом она осталась бы такой же красивой. По мимо этого 4мм алюминиевые боковые пластины никак не сочетаются со сквозной резьбой М2, которая идет на крепление к карбону. Стенки остаются 1мм, а это как-то не серьезно совсем.
По задней алюминиевой стойке тоже есть вопросы.
Очень хорошо, что в ней есть гнездо для крепежа разъема для антенны, но у меня вопрос, почему в ней не предусмотрено крепление для разъема ХТ60? сделать это было ведь совсем не сложно!
Также вызывает сомнения достаточность толщины карбоновой пластины под аккумулятором.
На мой взгляд 2мм мало. Пластина довольно длинная - 96мм, и крепится только по краям. При такой конструкции стоило бы использовать хотя бы 2.5мм пластину.
А еще лучше предусмотреть возможность дополнительной опоры для платины по центру. При этом можно было смело оставлять толщину в 2мм
Хотел бы еще отметить отсутствие торцевой фаски, хотя бы по краям основной пластины.
Вес рамы довольно большой, плюсом это назвать никак нельзя.
В общем вот такая вот довольно спорная рам, но я намерен исправить её некоторые технические недостатки, о чем постараюсь сделать отдельную запись.
Сегодня хочу рассказать о очередном напечатанном вертолете, с лопастями 120мм и питанием от двухбаночного аккумулятора.
На этот раз это будет вертолет, по большей части основанный на компонентах от вертолетов ХК К120 и ХК К110.
Мне давно хотелось создать вертолет подобного класса, с питанием от двухбаночного аккумулятора, так как увеличение напряжения питания позволяет понизить рабочие токи, снизить нагрузку на аккумулятор, и повысить эффективность силовой части, что очень позитивно сказывается на динамике вертолета. Все это подтверждалось сообщениями от пользователей и многочисленными видео полетов таких вертолетов как ХК К120, НСР100S и Align T-REX150. Однако данные вертолеты имеют ряд недостатков и конечно же, на мой взгляд, самым главным из них - это расположение хвостового мотора на конце хвостовой балки.
Поэтому я решил создать свой вертолет с уже хорошо зарекомендовавшим себя приводом хвоста через вал, и расположением хвостового двигателя внутри рамы, и соответственно питающийся от 2S аккумулятора. И вот что у меня получилось.
Рама вертолета - это уже хорошо знакома рама от однобаночной версии RX120, перерисованная под лыжи от вертолета ХК К120. Рама даже получилась немного легче, чем у однобаночной версии. Расположение основных элементов на раме осталось прежним.
К данному вертолету отлично подошла канопа от модели WL V977. Изнутри она была проклеена скотчем и подрезана сверху и по бокам для того чтобы не рвалась об переднюю тягу и об лыжи.
Это пробная версия вертолета, в финальной версии будут произведены совсем мелкие и незначительные доработки рамы, и надеюсь получится произвести глобальные перемены в электронике. А пока что расскажу из чего состоит данный вертолет.
В качестве полетного контроллера я использую плату от вертолета ХК К110. Данный полетный контроллер рассчитан на питание от однобаночного аккумулятора, поэтому мне пришлось использовать ВЕС banggood.com/5V-12V-Adjustable-Voltage-Dual-BEC-Ou…, для того чтобы снизить питающее напряжение, идущее от аккумулятора, до 5 вольт. Это самый маленький ВЕС с подходящими характеристиками, который мне удалось найти. Весит он 1г. Напряжение на выходе получилось 4.8В, но это даже плюс, так как ходят слухи что сервоприводы 5330, которые использую в этом вертолет, не сильно хорошо переживают питание от 5 вольт.
В качестве основного двигателя используется мотор Oversky HP06V2 на 8200kV. Данный мотор имеет отличные характеристики и очень приятную цену.
overskyrc.com/hp06v2-8200kv-trex-150-brushless-mot…
Причина такой низкой цены как оказалась проста.
This motor is specially designed for Trex 150, it fits the helicopter perfect. we have 1000 pcs of motors in stock, this is why the price is so low
Надежды Oversky, и не только их, на модель T-REX 150, по всей видимости не оправдались.
В качестве хвостового мотора я использовал двигатель BR1103 на 8000kV.
banggood.com/Racerstar-1103-BR1103-8000KV-1S-Brush…
Качество исполнения двигателя на очень высоком уровне, а цена более чем гуманна!
Хвостовой двигатель по традиции расположен между задних сервоприводов. Моторамаунт двигателя был немного доработан, чтобы не мешать установке сервоприводов. Было срезано два боковых крепежных ушка, а на оставшуюся пару крепежных ушек закреплен сам двигатель.
Как и в предыдущих моих вертолетах, приводной вал хвостового ротора закреплен непосредственно в роторе двигателя. Фиксируется вал маленьким болтиком на М1, который видно в торце ступицы ротора. Для этого болтика в ступице было просверлено отверстие и нарезана резьба. На краю вала присутствует шлиц, в который и упирается этот болтик.
В качестве сервоприводов используются всем хорошо известные сервопривода 5330.
Установка их на раме не перетерпела никаких изменений по сравнения с моделями RX100 и RX120.
Голову и лопасти я полностью взял от вертолета ХК К120.
С лопастей, при помощи спирта, стер никому не нужные надписи и логотип ХК, так как он никак не сочетался с синей канопой.
Лопасти довольно тяжелые и дают другое ощущение в полете по сравнению с более узкими и легкими лопастями от ХК К123 или WL V931.
Вертолет с ними боле вальяжный, чувствуется увеличившаяся инерционность ротора.
В цапфах я заменил подшипники. Стоковые подшипники мне совсем не нравятся. Они безсепараторного типа и не отличаются хорошим качеством.
С такими подшипниками у меня уже возникали проблемы с перекашиванием цапф при плотной затяжке межлопастного вала. Это приводило к вибрациям и “бабочке”. Поэтому я сразу их заменил на подшипники из цапф от вертолета WL V977. Они с пластиковым сепаратором, гораздо качественней и надежнее.
Тарелку автомата перекоса я также немного доработал. Заменил латунный “рыбий глаз” на капроновый, который выточил сам. Внутреннюю часть тарелки вклеил на локтейт в подшипник и максимально сточил нижнюю кромку под самый подшипник, для того чтобы она не терлась об основной вал при сильных отклонениях тарелки
Хаб также слегка был доработан, но этого практически не заметно. Со временем, острые кромки ограничителей тяг, стирают сами тяги, идущие от тарелки к цапфам. Я не стал снимать фаску с кромок для того чтобы затупить их, а просто слегка замял эту кромку при помощи обычной тонкой отвертки с хорошо отполированной боковой поверхностью. Для этих целей подойдет любой тонкий металлический стержень с гладкой поверхностью или конец тонкого сверла.
Визуально эффекта замятия практически не видно, но теперь край стал тупым и тяги уже не будут об него так сильно стачиваться.
Основной вал я сделал из карбонового прутка диаметром 2,5мм.
Хвост вертолета также не претерпел никаких изменений по сравнению с предыдущими моделями RX100 и RX120.
В нем использованы все те же конические шестерни от вертолета Walkera V120D02S и обрезанный пропеллер от WL V931.
Ну а теперь начинается самое интересное. Тут и находятся самые большие изменения по сравнению с однобаночной версией.
На фотографиях выше можно увидит уже знакомую укладку проводов от сервоприводов, и хвостового двигателя, она не изменилась, в отличии от всего остального.
Так как мощность вертолета выросла, по сравнению с однобаночной версией, я подумал, что лучше будет использовать основную шестерню от модели ХК К120.
Она боле прочная.
Как и в предыдущих своих моделях, я решил использовать скользящее крепление основной шестерни на валу.
Я срезал шлиц внутри шестерни и одел бандаж в виде латунной трубки на ступицу. Однако тут меня ждало некоторое разочарование, шестерня одевалась на вал не очень плотно. Отверстие под вал в ней оказалось чуть больше чем в шестерни от вертолета WL V977. Только на небольшом участке посадочное место под вал было нужного диаметра и плотно сидело на валу, но его площади было мало для хорошего сцепления с валом. Я уже было подумал использовать шестерню от вертолета WL V977, которая отлично подходила под скользящее крепление, и плотно садилась на вал, но потом решил, что можно и нужно доработать шестерню от К120.
Взяв металлический вал, я посадил на него шестерню от К120 на суперклей. Дождавшись, когда клей высохнет, я аккуратно сбил с него шестерню. Клей остался внутри посадочного отверстия и как раз добавил недостающего материала для плотной посадки на валу. Шестерня плотно села на вал вертолета и скользящее крепление стало работать как нужно.
Лыжи я старался максимально сместить назад, тем самым сместив назад аккумулятор, который в них вставляется, для правильной развесовки вертолета. Поэтому их пришлось немного доработать, сделав небольшой вырез под основную шестерню для того чтоб она могла свободно сползать с вала при авариях.
В качестве основного регуляторов я использовал Diatone D6. Это практически копия регулятора ХР7А. С выбором основного регулятора особых проблем нет, если подключать его к РРМ сигналу. Тут можно выбрать любой современный регулятор. C подключением основного регулятора по PWM дела обстоят похуже. Варианты выбора регуляторов ограничиваются наличием под них старых версий прошивки BLHeli, версии не старше 12.1, которая еще может понимать сигнал PWM. Из доступных вариантов есть регулятор ХР7А, а Diatone D6 который у меня был в единственном экземпляре, мне больше не удалось найти в продаже. Регулятора на 7 ампер должно хватать, так как рабочие токи при питании от 2S будут ниже, чем при питании от 1S.
Самая главная проблема в построении данного вертолета заключалась в поиске нужного хвостового регулятора.
Так как мы ограничены только сигналом PWM, для хвостового регулятора, то и выбор такого регулятора сильно сужается. С одной стороны, мы ограничены наличием под конкретный регулятор старых версий прошивки BLHeli не старше 12.1, которая понимать сигнал PWM, а с другой стороны нам нужен регулятор с быстрыми ключами, который сможет обеспечить нужную скорость отработки сигналов для хвостового двигателя.
И вот как раз с этими условиями все очень сильно усложняется. Регуляторов, отвечающих таким требованием к сожалению, нет. Есть вариант частичного решения данной проблемы путем переделывания регулятора ХР7А, при помощи замены определенных резисторов, и замена его прошивки на боле быструю версию ХР7АFast. Ту же процедуру можно провести с регулятором Diatone D6 и также использовать его для хвостового мотора.
Я в свою очередь, в данной модели, использую боле маленький и легкий регулятор MU3a для управления хвостовым двигателем. Для данного регулятора также подходит прошивка ХР7АFast, но с некоторыми оговорками.
В регулятор, который установлен в вертолете, я просто залил прошивку ХР7АFast, версии 11.2, и он нормально заработал. На более старших версиях, вплоть до версии 12.1, работа его была не стабильна. На последних 14 версиях прошивки данный регулятор также хорошо работал, но использовать их не имеет смысла так как поддержки сигнала PWM в них уже нет.
Однако самым главным открытием для меня стал тот факт, что на запасном регуляторе MU3a, прошивка ХР7АFast и даже обычна ХР7А, версии 11.2 не захотела работать стабильно. При этом на боле поздних прошивках 14 версии, регулятор работает стабильно, но как выяснилось в них занижена скорость отработки силовых ключей. Либо данный регулятор попался из другой партии с другим компонентами и не захотел работать нормально, либо его нужно также дорабатывать для стабильной работы с прошивкой ХР7АFast.
В общем уверенности в том, что любой регулятор MU3a сможет хорошо работать с прошивкой ХР7АFast у меня пока нет. Так же хочу сказать, что на совсем ранних релизах прошивки ХР7АFast, у регулятора выгорели 2 силовых ключа, поэтому экспериментировать сними я вам не рекомендую.
Но даже если все это опустить, то скорости стабильно работающей прошивки ХР7АFast возможно может не хватать для четкой работы хвоста.
Поэтому вопрос с хвостовым регулятором пока что к сожалению, открыт.
Еще одним неприятным открытием для меня стало отсутствие на рынке аккумуляторов такого типа, который используется в вертолетах ХК К120 и T-REX150
Самое интересное, что на момент проектировки все было нормально, а когда я начал собирать вертолет и решил заказать к нему аккумуляторы, то оказалось, что с хоббикинга пропали нанотеки на 330мАч, а альтернативы не появилось. С трудом я нашел нужный тип аккумуляторов на алиэкспрессе, одно порадовало, что по гуманной цене. Аккумуляторы оказались довольно хорошими.
Как можно видеть на фотографиях выше, аккумулятор установлен в корзине не до конца. Это сделано для правильной развесовки вертолета.
По отзывам владельцев вертолета ХК К 120 я понял, что существует проблема с выниманием аккумулятора из корзины, и решил сразу разобраться с этим.
Рассмотрев саму корзину, аккумулятор и разъём, я понял почему аккумулятор у ХК К120 плохо достается.
На это есть 3 причины.
1 - зацепы на самом разъёме.
Их нужно срезать.
2 - расположение разъёма.
Он повернут вырезами для зацепов вниз. Получается сам разъём при таком расположении, находится ниже и дальше от плоскости лыж, к которой он крепится.
При вынимании аккумулятора, даже с обрезанными зацепами разъёма, он все равно плохо достается, потому, что сам разъём находится далеко от плоскости его крепежа, и начинает загибаться во внутрь (вверх, если вертолет стоит). Тем самым становится сложнее разъединить разъём. Плоскость крепежа разъёма нужно совместить с плоскостью пинов внутри него, или как можно ближе к ней, тогда он будет свободно разъединяться. А для этого нужно перевернуть аккумулятор, чтобы сместить вверх ту часть разъема, которая находится на аккумуляторе, и соответственно гнездо на лыжах тоже можно будет сместить.
Как видно на фото, аккумулятор у меня развернут на 180 градусов в корзине, по сравнению с расположением в модели К120. Это позволяет легче разъединять разъём.
3 - на пластиковом корпусе аккумулятора могут быть облои, которые могут цепляться за корзину и мешать свободному движению аккумулятора в ней.
В моём случае данная проблема не актуальна, так как аккумулятор входит в корзину не до конца, и облой не мешает его движению.
Сам разъём, я закрепил на лыжах при помощи полоски текстолита, предварительно вставив и припаяв его к ней. Сама полоска прикручен к лыжам двумя саморезами.
В итоге аккумулятор из корзины, в моём вертолете, достается довольно легко. Сменить аккумулятор гораздо проще чем в однобаночной версии с jst разъёмом.
Ну и самое интересное - это полет.
Заставить вертолёт хорошо летать было не просто. Динамика двухбаночного вертолета заметно отличается от динамики при питании силовой части от одной банки. Самым важным отличием оказалась динамика работы хвостового двигателя. С повышением напряжения питания возросла мощность хвоста и скорость его реакции. И вот как раз с повышение скорости реакции хвостового мотора на сигнал от полетного контроллера связано много трудностей.
Полетный контроллер от вертолета ХК К110 имеет свои PID настройки, под характеристики и возможности конкретной модели. В частности, на скорости отработки сигнала хвостовым двигателем, учитывающие массу и инерционность хвоста, а также мощность и скорость хвостового двигателя.
Так как в моей модели хвост не имеет на конце тяжелого двигателя, а соответственно имеет меньший вес и инерцию, то и отрабатывает сигнал он гораздо быстрее. А если сюда добавить питание от 2S, то скорость ещё возрастет. И если в однобаночной версии PID настройки полётного контроллера еще подходили для хвоста, то на двух банках они уже не совсем подходят. В следствии этого получается перерегулирование хвоста. Чтобы это избежать нужно понизить в настройках хвостового регулятора параметр Motor Gain. Однако понижение данного параметра не проходит бесследно. Слишком низкое значение этого параметра приводи к тому, что хвосту не хватает скорости реакции. В данном вертолете мне пришлось его понизить до минимального значения 0,75, чтобы успокоить хвост и сминимизировать эффект перерегулирования. Хвост стал работать стабильно, однако после испытаний вертолета на новых аккумуляторах выяснилось что, на резких перекладках шага хвост не успевал отрабатывать и его начинало уводить.
Поэтому, для стабильной работы хвоста, пришлось слегка повысить гейн в настройках регулятора и смериться с его небольшой дрожью в работе.
Все эти танцы с бубном конечно не являются решением проблемы, а всего лишь полумерами. К сожалению, они не дают идеального результата. Настройки всех PID параметров как хвоста, так и всех остальных, должны производится непосредственно в полетном контроллере. Настроить их правильно на уровне регулятора практически невозможно.
К моему сожалению у полетных контроллеров от вертолетов ХК К110 или WLV977, нет возможности настройки PID, хотя эта возможность могла быть, это реализовать не сильно сложно и уже реализовано в других полетных контроллерах такого типа.
Поэтому в финальной версии я планирую использовать другой полетный контроллер с возможностью настраивать PID, и надеюсь, что хвост станет работать гораздо стабильнее и четче.
В плане силовой и механической части к вертолету претензий нет вообще. Основной мотор отлично держит обороты и нагрузку.
Для меня этот уровень мощности уже избыточен, и справится мне с ним довольно проблемно. Пришлось даже прикрутить немного шаг в настройках пульта, до 90%.
По сравнению с однобаночной версией, вертолет выстреливает в верх заметно быстрее.
Вес вертолета с лопастями от ХК К 120 получился не маленьким - 58г, однако он все-таки немного легче чем вертолет донор ХК К120.
Вес аккумулятора 18г, итого полетный вес получился 76г. Однако этот вес совершенно не ощущается, так как силовая часть легко с ним справляется.
Ну и напоследок групповое фото всех моих моделей.
По видео полета с лопастями от ХК К120 можно оценить динамику вертолета с питанием от двух банок. На мой взгляд она более чем впечатляющая.
Полетав на тяжелых и широких лопастях от ХК К 120, я решил попробовать поставить на вертолёт старые добрые лопасти от ХК К123. Они такой же длины, но уже и легче. И вот тут меня ждало приятное удивление. С лопастями от ХК К123 вертолёт заиграл новым красками!!! Полет стал более воздушным, а реакция и скорость по цыклику возросла. Вертолёт стал более юрким и лёгким. Летать с лёгкими лопастями от ХК К123 мне понравилось гораздо больше. Я вновь увеличил шаг до 100%, и получил на узких лопастях такой же отклик по шагу, как и на широких.
Так же, по ощущениям, с лёгкими лопастями незначительно увеличилась скорость головы, и снизилась нагрузка на аккумулятор.
Вот видео полёта с более лёгкими лопастями от WL V931, по которому можно будет оценить возросшую скорость по цыклику и общую воздушность полёта.
P.S.
Фото в нормально разрешении можно посмотреть тут.
www.rcgroups.com/forums/showpost.php?p=37229447&po…
Данная запись появилась для облегчения процесса настройки вертолета новичками и не только.
Это подробная инструкция о настройки нулевого шага лопастей.
1 включаем пульт и все триммеры ставим в 0! Пульт должен быть правильно откалиброван.
2 включаем вертолет.
3 включаем холд (блокируем запуск двигателей)
4 включаем айдл (постоянные обороты) при этом двигатели заблокированы холдом и не включатся.
5 ВЫКЛЮЧАЕМ холд, (снимаем блокировку двигателей) двигатели не включатся сработает защиата в полетнике, при этом стик шага будет работать на всём диапазоне.
6 ставим стик шага по центру.
7 смотрим на качалки сервоприводов. При необходимости откручиваем болтики крепящие качалки, и выставляем качалки на валу сервопривода максимально близко к горизонтальному положению при центральном положении стика шага.
8 смотри в камом положении на валу находится тарелка. Она должна быть примерно по середине, между стопорным кольцом и хабом, а направляющий пин тарелки должен быть по середине скобы антивращателя При этом, в крайних положениях стика по элеватору, направляющий пин тарелки не должен упираться в концы скобы антивращателя.
9 сводим лопасти вместе и смотри галочку в среднем положении стика шага. Галочки не должно быть. При центральном положения стика шага лопасти должны находится в одной плоскости.
10 если галочки нет(ноль настроен правильно), но при этом тарелка не по середине, а ее направляющая при максимальном отклонении стика по элеватору упирается в один из концов скобы антивращателя, это означает что мы имеем не правильную длину основного вала!
11 если тарелка боле менее по середине и ход ее направляющей не ограничивают края скобы антивращателя, но при этом лопасти находятся не в 0, а при нулевом положении стика шага мы видим галочку из лопастей, это означает что не верно настроен 0. Крутим все 3 тяги, идущие от сервоприводов, в + или - , на одинаковое количество оборотов и добиваемся того, чтобы в среднем положении стика шага лопасти были в 0 и не было галочки.
12 Если добиться нулевого положения лопастей не возможно изменением длинны тяг, их длины не хватает или наоборот они слишком длинные, а при этом пункт 7 выполнен, тогда смотрим пункт 10.
13 если мы сталкиваемся с ситуацией описанной в пункте 10 или 12, это означает, что мы имеем не правильную длину основного вала. Чтобы решить эту проблему, для начала строго контролируем выполнение пункта 7. Дальше еще раз( на всякий случай) выполняем пункт с 1 по 6 включительно ! После этого, изменяем длину всех трех тяг в + или - , и выставляем тарелку автомата перекоса на валу таким образом, чтобы направляющий пин тарелки был примерно по середине скобы антивращателя. Тарелку при этом стараемся выставлять боле мене перпендикулярно плоскости основного вала. Дальше, путем уменьшения или увеличения длины основного вала добиваемся того чтобы при центральном положении стика шага, лопасти были в 0 положении, а галочка отсутствовала. Фиксируем длину основного вала.
14 Настраивая длинну тяг по одной, выставляем тарелку в 0 положение, перпендикулярно плоскости основного вала. Для этого пользуемся специальными инструментами или приспособлениями.
15 после выполнения пункта 14, еще раз проверяем положение лопастей в центральном положении стика шага. Лопасти должно быть в одной плоскости, а галочка должна отсутствовать. При необходимости корректируем положение тарелки как описано в пункте 11 и добиваемся нулевого положения лопастей.
Ну и если вы все это прочли, и настроили свой вертолет, вот вам видео для поднятия настроения и понимания, откуда взялся выше изложенный текст)))
Это продолжение предыдущей статьи, про напечатанный на 3D-принтере вертолет с лопастями 100мм.
После сборки пробной версии RX100 rcopen.com/blogs/198531/22246 , я решил немного доработать раму и сделать вертолет боле компактным.
В общей сложности рама уменьшилась на 4мм.
Так же уменьшились лыжи и канопа.
Размеры рамы RX100 в сравнении с рамой RX120 в сборе, можно оценить по следующим фото.
Основная проблема, с которой я столкнулся при проектировании и сборки данного вертолета - это отсутствие на рынке готовых лыж немного меньшего размера, которые бы подходили под мою раму, и под аккумулятор, который используется в данной модели, а также устраивали меня своим внешним видом. В пробной версии я использовал лыжи вертолета Wltoys v977, но они были великоваты по длине.
Так как готовых решений не было найдено, я решил просто уменьшить уже всем хорошо знакомые лыжи от V977. Для этого лыжи были разделены на две части, а полозья укорочены на 4мм. После в торцах полозьев я просверлил отверстия, и снова соединил их вместе при помощи карбонового прутика диаметром 0.8мм и суперклея.
Лыжи получились нужной длинны и не потеряли свое внешнего вида, прочности и функциональности.
Ну а дальше я пересобрал все компоненты вертолета на новой раме.
Никаких особых изменений по сборки не произошло, все компоненты вертолета остались прежними и на своих местах.
Более подробное описание есть в предыдущей статье, поэтому повторять его здесь я не буду.
Ну и пара групповых фото.
RX80, RX100, RX120.
В общем вертолет стал немного компактнее и приобрел более сбалансированный внешний вид.
P.S.
Фото в нормальном разрешении можно глянуть тут: www.rcgroups.com/forums/showpost.php?p=37064379&po…
Напечатанный вертолет 80 размера.
В очередной раз, продолжая тему о напечатанных вертолетах, хочу представить вам мой вариант на тему HiSky HCP60.
Сегодня это будет пробный вариант самого маленького пилотажного вертолета, полностью на бесколлекторных двигателях, а также с приводом хвостового ротора через вал.
Решение создать данный вертолет было вызвано появлением на рынке модели HiSky HCP60, которая не блистала хорошими полетными качествами, но могла послужить донором запчастей.
Мне хотелось создать вертолет подобного размера, но на бесколлекторных двигателях, которые обеспечили бы хорошую мощность вертолету, а также на основе полетного контроллера от моделей ХК К110, который бы обеспечил более стабильный и плавный полет. Так же очень хотелось создать вертолет, который весил бы в пределах 25г, но сделав некоторые расчеты, я понял, что это будет очень сложно, и определил для себя более реальную цифру в 28г.
Ну и конечно полетав на вертолетах с приводом хвоста через вал, и хвостовом мотором внутри рамы, мне хотелось и эту модель сделать по такой же схеме, хотя в начале процесса проектирования, мне эта схема показалась довольно сложно реализуемая, в данном размере вертолета. По мимо всего этого, в качестве сервоприводов мне хотелось использовать обычные сервоприводы 5320. Они легкие и быстрые, в отличии от сервоприводов червячного типа, которые используются HiSky HCP60, и мощности их хватает с головой, для 80мм лопастей.
А теперь хочу рассказать обо всем по порядку и боле подробно.
Начнем с основы вертолета - рамы.
Раму я придумывал довольно долго, было много вариантов, начиналось все с компоновки, в которой хвостовой мотор был на конце хвостовой балки, а закончилось компоновкой с хвостовым двигателем внутри рамы, и приводом хвоста через вал.
Рама состоит из 2 основных частей, лыж, хвостового кейса и хвостового плавника.
Рама получилась очень прочной, и довольно симпатичной. Но к сожалению, вся эта прочность далась не просто так, рама вышла довольно тяжелая.
Вес рамы вместе с лыжами вышел целых 5г, и это было немного больше чем я ожидал.
Верхняя часть рамы является держателем сервоприводов, и крепится к нижней части при помощи 2 маленьких саморезов.
Лыжи вставляются в нижнюю часть на 4 штырьках. Отверстие под хвостовую балку имеет шлиц. Сама хвостовая балка держится в раме за счет силы трения.
Дальше хочу рассказать про компоновку всех основных элементов вертолета на раме.
Было довольно сложно вместить все необходимые элементы в столь маленьком вертолете. Ради компактности пришлось пожертвовать удобством сборки и разборки.
Определяющее значения в компоновке сыграло решение использования полетного контроллера от вертолета ХК К110. По своей сути расположение полетного контроллера и сервоприводов получилось таким же как у вертолетов ХК К110/v977, только перевернуто задом на перед. То есть мы получаем такую же компоновку как при полете хвостом вперед на вертолетах ХК К110/v977. Поэтому для корректного управления моделью нужно реверсировать каналы элеватора и элеронов в пульте управления. Все остальное каналы остаются без изменений. Единственным исключением в компоновке RX80 является, то что элеваторный сервопривод находится “не на своем месте”. Он должен был быть с левой стороны, на месте основного двигателя, но я по традиции расположил с левой стороны основной мотор. Поэтому по мимо реверса каналов управления в пульте, необходимо еще и реверсировать и сам элеваторный сервопривод. В финальной версии я скорее всего исправлю эту ситуацию, и поменяю местами основной двигатель и элеваторный сервопривод. Это позволит упростить сборку и избавит от необходимости реверса самого сервопривода.
На боковых стенках элеронных сервоприводов расположились регуляторы скорости.
Это не самое удобное решение, но за компактность приходится платить.
В качестве основного регулятора я решил использовать MU-3a. Этот регулятор рассчитан на нагрузку в 3А и на питание от 3.7 -7.4В. Выбор этот обоснован тем, что данный регулятор позволяет реализовать все возможности основного двигателя. Конечно мне хотелось использовать более легкий регулятор МХ-3а, для основного двигателя, но на мой взгляд этот трех амперный регулятор не справляется с нагрузкой, которую возлагает на него основной двигатель. Поэтому регулятор МХ-3а я использовал для хвостового мотора. Тут нагрузки в разы меньше и регулятор отлично справляется со своей задачей. Регуляторы закреплены на двусторонний скотч и соединены между собой лакированными одножильными проводами, в белой термоусадке, по которым проходит питание.
Хочу рассказать немного о настройках регуляторов.
Те, кто летал на вертолетах v977 и К110 наверняка заметили большую разницу в поведении и управляемости этих моделей.
Все дело в разных настройках PID, в полетных контроллерах этих моделях. Если v977 шустрый, быстрый и не устойчивый, то К110 боле стабильный, устойчивый, но и более медленный. Работа хвоста в этих моделях также отличается.
Так как я в своих моделях использую полетные контроллеры как от К110, так и от V977, я обнаружил, что и настройки для хвостового регулятора так же отличаются в зависимости от используемого полетного контроллера.
Для полетного контроллера от V977, параметр Motor Gain, в настройке хвостового регулятора, нужно выставлять на максимум.
Для полетного контроллера от К110, параметр Motor Gain, в настройке хвостового регулятора, нужно уменьшить до 1. Если этого не сделать, то хвост будет трясти.
В качестве основного двигателя я использовал НР03S на 13500kV overskyrc.com/hp03s-13500kv-genius-cp-helicopter-p…
На двигателе установлен пиньон на 8 зубов с модулем 0.3.
В дальнейшем возможно попробую использовать боле быстрый двигатель HP03S V2 16000kV, или установлю на имеющийся мотор пиньон на 9 зубов.
Хвостовым двигателем служит HP02T 12000kV overskyrc.com/hp02t-12000kv-tail-motor-with-6mm-mo…
Вал двигателя был удален. В колоколе, с боковой стороны было просверлено отверстие и нарезана резьба М1, для закрепления вала, который одновременно является и валом двигателя, и приводным валом для хвостового ротора.
Сам приводной вал выполнен из карбонового прутка, диаметром 1,5мм, на концах вала имеются срезы под шлицы, для крепления самого вала в колоколе и для установки приводной конической шестерни на другом его конце.
Двигатель устанавливается в раму, и крепится в нужном положение 2-мя саморезами сбоку и 1 саморезом сверху, который одновременно крепит и верхнюю часть рамы. Данное решение не самое лучшее, довольно сложно зафиксировать хвостовой мотор в нужном положении, но оно было продиктовано отсутствием двигателей такого размера с другим типом крепежа.
В финальной версии я планирую отказаться от подобного решения, и поступлю более радикально. Мотормаунтом для хвостового двигателя будет служить часть рамы. Двигатель будет разобран, а статор и подшипники будут устанавливаться непосредственно на раму. Это позволит снизить вес вертолета и повысит точность позиционирования хвостового двигателя.
Хвостовая балка выполнена из карбоновой трубки, наружным диаметром 3мм, а внутренним 2мм.
На концах балки имеются срезы под шлицы, для фиксации ее в нужном положении в раме, и для установки на конец хвостовой балки хвостового кейса.
Сам хвостовой кейс крепится к балке при помощи самореза. В качестве приводных шестеренок я использовал самую маленькую коническую шестерню из набора хвостовых шестеренок для вертолета Walkera V120D02S
banggood.com/Wholesale-Walkera-New-V120D02S-RC-Hel…
Вал для хвостового пропеллера выполнен из карбонового прутка диаметром 1.5мм. Хвостовой пропеллер взят от вертолета WL v911, и рассверлен под вал диаметром 1,5мм. В качестве подшипников я использую подшипники от цапф для вертолета ХК К110/v977 banggood.com/WLtoys-V930-V966-V977-V988-RC-Helicop…
Хвостовой плавник я сделал по типу плавника от предыдущих своих моделей RX120 и RX100, но немного уменьшил его.
Плотность компановки вынудила меня, в процессе сборки, немного уменьшить в размерах элеваторный сервопривод.
В принципе его можно было и не уменьшать, и оставить как есть, но мне захотелось сделать все красивее.
Для начала я уменьшил длину сервопривода на 0.4 мм. Для этого я сточил заднюю крышку на 0,4мм и немного переделал защелку на центральной части. Это дало больше пространства для тяги от правого элеронного сервопривода, и исключило возможность того что тяга будет цеплять заднюю стенку соседнего элеваторного сервопривода.
Но этого мне показалось мало, и я решил пойти дальше. Тяга от элеваторного сервопривода находилась под небольшим углом к тарелке автомата перекоса, и я захотел это исправить. Подвинуть сам сервопривод было невозможно, укоротить его сзади еще больше тоже было некуда, потому я решил сделать тоньше сам рычаг сервопривода, тем самым подвинуть тягу вперед и устранить ее наклон. Для этого я обрезал на 1мм заднюю часть рычага, но это никак не способствовало тому чтобы он оделся на вал глубже, ближе к корпусу сервопривода.) Поэтому помимо обрезания рычага я укоротил выходной вал. Для этого я снял вал, одел его на сверло подходящего диаметра и зажав всю эту конструкцию в бормашине, срезал токарным способом 1мм с вала, сохранив его прежнюю форму. В итоге на валу и на рычаге, зацепные шлицы, по длине, остались около 0.8мм, чего боле чем достаточно для хорошего зацепа, между выходным валом и рычагом сервопривода.
Итого, без особых трудностей, габариты сервопривода удалось уменьшить на 1.4мм! В финальной версии я скорее всего учту эту возможность и буду проектировать раму под уменьшенные сервопривода. Это позволит укоротить раму, сделать все конструкцию боле компактной, и немного легче.
Голову и лопасти для данного вертолета я взял полностью от HiSky HCP60.
По традиции заменил латунный рыбий глаз на капроновый. Крепежный винт хаба заменил карбоновым прутком, диаметром 0.8мм. Болты, которые крепят лопасти в цапфах, заменил на нейлоновые.
Демпфера я установил от V977, они более жесткие, но немного меньше по толщине чем демпфера от HCP60, поэтому пришлось сделать новые упорные шайбочки между подшипниками и демпферами.
Основной вал выполнен из карбонового прутка диаметром 2мм. На конце вала сделан срез под шлиц для установки основной шестерни. Я решил оставить крепление шестерни на валу при помощи шлица, так как за время использования такого решения на HCP60, проблем с валом не возникло. Вал не расслаивается и не ломается. Ну и всегда, при необходимости, можно переделать вал и шестерню под скользящий тип крепежа, который отлично себя показал на предыдущих моделях RX120/RX100.
Основную шестерню я также использовал от HCP60.
Полетному контроллеру место нашлось только внизу, под “брюхом” вертолета.
Он крепится к раме при помощи двустороннего скотча. Вес полетного контроллера оставляет желать лучшего и составляет 2.8г. Я рассчитывал, что он все-таки будет чуть полегче, помня вес платы управления от V977 который составлял 2.5. Конечно можно его облегчить на 0.7г убрав все разъемы, но мне очень не хочется этого делать.
По весу вертолет получился тяжелее чем планируемые 28г.
Вес его составил 29.3г. Несмотря на это, даже с не свежими аккумуляторами на 200мАч от V911, вертолет летает очень шустро!
Ну а я заказал для него новые аккумулятороы на 220мАч с высокой токоотдачей 50С. tmart.com/3-7V-200mAh-30C-Lipo-Upgrade-Battery-for…
С этими аккумуляторами вертолет будет еще бодрее.
RX80 и HCP60. По габаритам вертолеты почти одинаковы, RX80 немного ниже.
Сравнительные размеры RX120, RX100, RX80.
Ну и пара групповых фото.
Резюмируя могу сказать, что вертолет удался!
Несмотря на то, что не все вышло как хотелось вертолет летает, и летает очень хорошо.
Финальная версия будет переработана с учетом всех выше перечисленных недочетов. Надеюсь получится сделать ее еще боле компактной, повысив плотность сборки, а также уменьшить вес, хотя бы на 1г, и основная задача которую придется решить - это печать лыж. Полиамид РА2200 не сильно хорошо подходит для этих целей. Есть другие виды материалов для печати по технологии SLS, более гибкие и подходящие для лыж, но они не слишком распространены и печать из них довольно дорогая. Поэтому нужно будет искать компромисс между ценой, качеством, доступностью и характеристиками материала, для печати лыж.
P.S.
Фото в нормальном разрешении можно глянуть тут www.rcgroups.com/forums/showpost.php?p=36241973&po…
Приехали хорошие аккумуляторы Giant-Power-220mAh-3-7V-1S-50C, удалось полетать на улице даже по холоду.
Вот небольшое видео полета.
Волей судьбы, попал ко мне в руки мотор HP03V2 на 13200kv.
Мотор этот немного больше чем обычный HP03S который стоял у меня в данном вертолете, почти на 1.5 выше и на пол грамма тяжелее.
Не долго думаю я решил поставить его в вертолет. Вертолет прибавил в весе пол грамма, но зато мощность увеличилась значительно!
Мотор мне очень понравился, тяговооруженность заметно возросла, вертолет стал действительно летать, а не цепляться за воздух! Пришлось даже поставить на хвост пропеллер большего диаметра, чтоб хвост не сносило при резких перекладках шага!
Вот небольшое видео полета с новым мотором. Я думаю по нему можно понять как изменилась динамика вертолета.
Напечатанный вертолет 100 размера.
Итак, продолжая тему напечатанных вертолетов, хочу представить вам еще один свой вариант на тему V977 - К110.
На этот раз это настоящий сотый размер.
Вертолет данного размера я решил собрать по причине наличия большого количества лопастей от V977, и подходящего двигателя для этих лопастей HP05s на 14000 kV.
Основой вертолета стала уже знакомая вам рама от 120 версии, которую я немного укоротил. Тем не менее, я постарался сделать так чтоб, лыжи от V977 так же подошли к этой раме.
Это не финальная версия вертолета 100 размера. Окончательная версия рамы будет еще короче, и будет либо с собственными лыжами, либо под укороченные лыжи от 977, если у меня получится красиво их укоротить. Так же планирую попробовать лыжи от V966, они немного короче, и возможно, как раз подойдут для этой рамы.
А в данном варианте, с лыжами от V977, корзина для аккумулятора сдвинута немного больше, чем необходимо, к передней части рамы.
В целом, сборка этого вертолета повторяет сборку RX120. Между 100 и 120 версией, отличий немного, но они есть.
Как я уже сказал выше, рама немного короче, из-за использования более компактных и легких сервоприводов 5320. По мимо более легких сервоприводов, основной двигатель HP05s также чуть меньше и легче, чем двигатель HP06V2. Хвост также стал короче на 15мм.
Двигатель для хвоста я собрал из 2 двигателей. Статор и ротор я взял от уже ранее использованного двигателя C05S. Он хоть и не блистал своими характеристиками, но свои функции выполнял хорошо, однако тип крепления у него был не подходящий. Поэтому, мотормаунт для него я снял с двигателя BR1103.
В остальном же устройство хвоста полностью повторяет хвост от RX120, с приводным валом. внутри хвостовой балки.
Еще одним отличием RX100 стала основная шестерная от Walkera Mini CP. Шестерня немного меньшего диаметра и с меньшим количеством зубьев. Данная шестерня насчитывает 61 зуб и в сочетании с пиньоном на 9 зубов передает основному ротору довольно высокие обороты.
Остальные компоненты не претерпели изменений. На фото выше можно видеть все те же регуляторы МХ-10а и МХ3а.
Основная плата также осталась от V977. Механика головой также была взята от металлического аппгрейда для V977.
Помимо RX100 я собрал еще один RX120.
Ниже на фото можно увидеть сравнительные размеры этих вертолетов.
RX100 получился чуть компактнее и легче чем RX120. Вес его составляет 45.9г
Летает вертолет очень бодро, что в принципе было ожидаемо.
Ну и напоследок, пара групповых фото.
И небольшое видео полета.
P.S.
Фотографии в нормальном размере можно глянуть тут.
www.rcgroups.com/forums/showpost.php?p=36019947&po…
В этой записи, я хочу рассказать о квадрокоптере, на раме LKTR 120.
Это мой первый квадрокоптер, который я собрал.
Начну с комплектации.
полетный контроллер PIKO BLX - furiousfpv.com/product_info.php?products_id=41
рама и моторы LKTR 120 + DP03 - banggood.com/LKTR120-120mm-Micro-Fiberglass-Frame-…
регуляторы ХМ-10а - banggood.com/DYS-XM-Seris-XM10A-BLHeli-mini-10A-ES…
камера 120 градусная - surveilzone.com/600tvl-120degree-wide-angle-super-…
крепеж для камеры Diatone Universal Mini Camera Lens Adjustable Holder - banggood.com/Diatone-Universal-Mini-Camera-Lens-Ad…
передатчик FX758-2 - banggood.com/FPV-5_8G-200mW-32CH-Wireless-Audio-Vi…
OSD MICRO MinimOSD- banggood.com/MICRO-MinimOSD-Minim-OSD-Mini-OSD-W-K…
сателлит Lemon Rx DSMX Comptaible Diversity Satellite - www.lemon-rx.com/index.php?route=product/product&p…
ВЕС - banggood.com/5Pcs-Mini-DC-Adjustable-Power-Supply-…
антенна для передатчика - surveilzone.com/5.8g-circular-polarized-omni-cloud…
алюминиевые стойки - banggood.com/Diatone-M220mm-Aluminum-Standoff-For-…
лопасти Hubsan Upgraded 3-Leaf Propellers - banggood.com/Hubsan-Upgraded-3-Leaf-Propellers-for…
маленькая пищалка - www.aliexpress.com/item/…/32588322689.html
аккумуляторы - 2S 450-520мАч
Выбрал я эту раму и такой сетап, для того, чтобы научится летать и никому не навредить, так как опыта полетов по FPV, до этого, у меня не было.
Задачи для себя ставил собрать квадрокоптер с диагональю 120мм на двух баночном аккумуляторе, и вписаться в вес без аккумулятора в пределах 55-60г
Сетап не идеальный , но свои задачи по обучению он пока выполняет.
Сборка
В связи с тем, что внешний вид для меня не менее важен, чем полетные характеристики, я решил все компоненты квадрокоптера установить внутри рамы.
Задача оказалась не сильно простой, но выполнимой. Основная проблема была в том, что регуляторы не вмещаются по ширине между стоек рамы. Поэтому мне пришлось сделать пропилы в стойках, для регуляторов.
Также я решил сделать раму двух ярусной. Передняя часть в которой расположилась камера, повыше, вся остальная рама с электроникой, пониже.
Полетный контроллер PIKO BLX мне очень понравился, он компактный, легкий и имеет встроенную PDB.
Поэтому я решил подпаять регуляторы напрямую к контроллеру. Для большей компактности я удалил разъемы подключения сателлита, с полетного контроллера и с самого сателлита.
Сверху задней пары регуляторов расположился передатчик.
Плотная компоновка привела к появлению помех на видео изображении. Я долго искал причину помех. Первым делом подумал что причина в питании камеры и передатчика, но оно оказалось не причем. Помехи усиливались по мере возрастания нагрузки и оборотов на двигателях.
Оказалось, помехи дают регуляторы.
Даже при раздельном питании квадрокоптера и видеосистемы, если положить передатчик на место его установки, над задними регуляторами, на картинке появляются помехи, при работе двигателей. Стоило только поднять передатчик на пару сантиметров выше, как помехи практически исчезали.
Я решил экранировать передатчик от регуляторов при помощи алюминиевой фольги.
Отдельно экранировал сами регуляторы.
и отдельно экранировал снизу сам передатчик, и подклеил его на регуляторы на двухсторонний скотч.
К моему сожалению это не решило проблему с помехами полностью, но я не сдавался. Я начал проверять настройки самих регуляторов.
Отключил в настройках регуляторов Demag Compensation и помехи пропали!!!
Сверху передней пары регуляторов расположились сателлит и ВЕС, а сверху полетного контроллера располагается OSD.
OSD подпаяна к полетному контроллеру при помощи 2 жестких пинов. Они сразу служат и фиксирующими и передающими сигнал RX-TX элементами.
Всю электронику, кроме камеры, удалось вместить в пространство 8*27*72мм.
Антенна передатчика крепится к раме через пластиковый переходник.
Снизу рамы расположен силовой разъем.
Камеру я решил установить в держатель, для того чтобы иметь возможность изменять угол ее наклона.
Сам держатель я модифицировал, убрал все лишнее, и закрепил его с нижней наружной стороны рамы.
Стойки, которые крепят ту часть рамы, в которой расположилась камера, получились по высоте 17мм.
Сверху я расположил пищалку.
Держатель камеры крепится к раме при помощи 2 винтов, но не жестко, а через демпфера, которые надеты на винты. Все это необходимо для того чтобы убрать “желе” с видео. Демпфера я сделал сам из силиконовой оплетки провода 18AWG, одев кусочки этой оплетки на крепежные винты, а на концах добавил по маленькому резиновому колечку, которые расширяет эту оплетку на концах изнутри. Получилось очень даже работоспособные демпфера, которые убрали “желе” с видео.
Ну и в результате получился вот такой квадрокоптер.
По весу квадрокоптер получился ровно 61г без батареии.
О комплектующих и сборке.
Сборка этого квадрокоптера у меня растянулась больше чем на месяц, из-за за некачественных комплектующих.
Из 5 заказанных регуляторов ХМ-10а рабочими оказались только 3!!! Новый заказал в другом месте и ждал доставки целый месяц.
Дальше по поводу рамы и моторов. С первого раза в комплекте рамы и моторов также было не все гладко.
Три из четырех моторов давали сильные вибрации при работе. Качество моторов DP03 на 7800kv, если честно меня расстроило. Второй набор рамы и моторов пришел боле вменяемый.
Рама выполнена из текстолита, толщиной 1.5мм. Рама не блещет прочностью поэтому с ней нужно быть аккуратным. Мне уже удалось сломать один луч.
Хорошо, что была запасная нижняя пластина.
Изначально я использовал двухлопастные пропеллеры banggood.com/10-Sets-Hubsan-X4-H107L-H107C-H107C-P… но они оказались очень слабые в плане тяги и очень хрупкие. А вот трехлопастные которые я сейчас использую мне очень понравились. Тяга с ними гораздо лучше, и они не ломаются! В будущем я хочу попробовать поставить четырёхлепестные пропеллеры RX2535W. Думаю, что с ним квадрокоптер полетит гораздо лучше.
По камере я могу сказать, что угол обзора мне понравился, но не понравилось то что не исправлены бочкообразные искажения объектива.
К передатчику и сателлиту у меня пока претензий нет, они выполняют свою задачу.
Осталось вникнуть в настройку PIDов, и научится летать.
Вот небольшое видео полета данного квадрокоптера.
UPDATE
В общем полетав немного на квадрокоптере и получив кое какой опыт, понял что нужно менять пропы.
Заказал пропы от JJRC 1000A banggood.com/JJRC-1000A-RC-Quadcopter-Part-Propell…
Пропы очень понравились! Сделаны очень качественно! Пропы крепкие и самое главное, тяга с ним очень выросла.
Коптер стал намного резвее! Моторы и регуляторы при этом остаются теплые.
По размерам пропы вышли 55.5мм в диаметре, ширина лопасти 8.2мм.
Думаю что можно еще наращивать длину пропов вплоть до 61мм. Мощности двигателей DP03 на 7800kv, вполне хватает для этого.
Так же отказался от использования внешнего ВЕС. Это облегчило коптер на 1.4г. Сухой вес стал 59.6г
Всю видео систему запитал от встроенного в полетный контроллер ВЕС, он с этой задачей отлично справляется.
Ну и самое главное изменение, квадрик перешел на питание от 3s! моторы себя чувствуют нормально!
Точно замерить тягу не удалось, весы не позволили, так как тяга стала больше 100г с мотора!
Полетный вес с аккумулятором 3S на 450мАч - 98г.
Вот небольшое видео полета на трех банках.
Обзор и модификации
Итак, в данной записи хочу поделиться своими впечатлениями о самом маленьком шестиканальном вертолете HiSky HCP60, а также расскажу от том, как заставить его летать.
HiSky HCP60 это очень маленький вертолет, длинна лопастей у него всего лишь 80мм!
Общие размеры вертолета следующие:
Длина - 180.8мм.
Высота - 65.5мм.
Диаметр основного ротора - 182.7мм.
Диаметр хвостового ротора - 37мм.
Вес без аккумулятора - 29.5г.
Взлетный вес - 34.5г.
Протокол управления - HiSky
Я заказывал версию BNF, приехал он в простой, но симпатичной картонной коробочке. В комплекте был вертолет с аккумулятором, зарядка и немного запасных деталей.
Комплектация довольно богатая и это приятно порадовало! Однако не все так красиво и хорошо, как могло показаться на первый взгляд, но обо всем по порядку.
Как и у любой массовой модели, у данного вертолета есть свои плюсы и минусы.
К моему сожалению, минусы у данного вертолета гораздо существеннее, чем плюсы.
Начнем с плюсов
1 - цена вертолета.
2 - цена запасных частей.
3 - ВЕЛИКОЛЕПНАЯ КРАШЕУСТОЙЧИВОСТЬ!
4 - маленький вес и размер не способный причинить большого вреда окружающим людям и предметам.
5 - хорошее качество пластиковых деталей.
6 - богатый комплект поставки.
Теперь о минусах
1 - FBL. Это самый главный минус этого вертолета, делающий его остальные недостатки совершенно не существенными и не имеющими значения.
Система управления вертолетом построена на устарелых компонентах, и полет вертолета, под ее управлением, очень нестабилен, и не приносит особого удовольствия.
2 - в стоковом состоянии вертолету катастрофически не хватает мощности.
3 - слабый и нестабильный хвост.
4 - ужасная сборка. Вся проводка торчит в разные стороны.
5 - слабая токоотдача стоковых аккумуляторов.
6 - большой вес для такого размера.
7 - плохое качество подшипников.
8 - не просчитана тарелка автомата перекоса, ее хода не хватает чтобы реализовать все возможности сервоприводов и она упирается внутренней обоймой в основной вал.
9 - большие осевые люфты в сервоприводах
Вот пару фотографий про неаккуратность сборки.
Несмотря на то, что практически все элементы вертолета выполнены очень качественно и точно, в стоковом состоянии вертолет выглядит совсем не опрятно и не особо хочет летать.
Двигатель душится очень сильно, о стабильности полета речь так же не идет. Комфортно можно летать только блинчиком.
Выполнить простой флип в помещении с высотой потолка 2.7м у меня не вышло. Вертолет очень сильно просаживается по оборотам и не успевает перевернуться не достигнув земли или ближайшей стены.
На улице с флипами конечно чуть проще. Но сделать серию флипов или ролов , хотя бы 2 подряд, у меня также не получилось из-за нехватки мощности.
Радости от полета не много, плюс нестабильность хвоста ее не добавляет.
На мой взгляд вертолет получился очень сырой, и на месте Хайская в таком виде пускать его в серию я бы не стал. Но так как я не на месте Хайская, я решил по возможности устранить все минусы и выжать все, что можно из этого мальца.
Модификации
Скажу сразу, самое приятное в модификациях данного вертолета, это то, что они практически не требуют никаких затрат.
Приводим в порядок проводку.
Для начала я укоротил и спрятал внутрь рамы все провода от сервоприводов.
Затем заменил проводку для хвостового мотора. Проводку сделал из одножильного лакированного провода толщиной 0.35мм
Убрал лишний элемент и укоротил силовой провод.
Убираем лишний вес
Первым делом я избавился от пластиковой подставки под плату.
Вместе со скотчем и 4 винтиками она вест 0.8г!
Плату приклеил к раме на двухсторонний скотч.
По мимо этого просверлил 6 отверстий в раме для облегчения.
.
После облегчения рамы, я обнаружил на ней маленький, но неприятный недочет конструкторов.
Левый элеронный сервопривод упирался в раму конденсатором. От этого плата сервопривода даже немного деформировалась.
Я решил, что это не приведет ни к чему хорошему и подрезал раму в месте контакта с конденсатором.
.
Дальше я решил избавиться от тяжелого металлического основного вала.
Я так и не понял почему производитель решил использовать металлический вал в модели такого размера, данный вал весит 1г. Это просто непростительно много для этого вертолета. Я решил заменить его на карбоновый.
Вал изготовил из 2мм карбонового прутка. Вес вала получился 0.2г!
Болтик, который фиксирует вал в хабе, решил не использовать, а вместо него решил поставить штифт, из карбонового прутка диаметром 0.8мм.
Для того чтобы латунный рыбий глаз в тарелке не стирал карбоновый вал, я заменил его на капроновый, который выточил сам.
После этого я избавился от тяжелых металлических болтов, которые фиксируют лопасти в цапфах.
Болты я заменил на нейлоновые. Металлические болты весят 0.3г, нейлоновые весят 0.06г. У меня были нейлоновые болтики под резьбу М2. Я нарезал на их резьбу М1.6 и зафиксировал ими лопасти в цапфах.
На этом с облегчением я решил закончить.
Замена хвостового пропеллера.
Я испробовал много разных пропеллеров, но остановился на таком.
Как не странно, но этот же пропеллер, установленный на V977, мне не очень понравился)
Не большая модификация рамы.
После всех выше проделанных модификаций, я решил немного поднять шасси, и сделать так чтобы они вплотную прилегали к раме батарейным треем.
Для этого снизу рамы я подрезал на 1мм посадочные места для лыж.
Так же пришлось немного укоротить сами штырьки на лыжах, которые входят в эти посадочные отверстия. И поднять пиньон на двигателе, чтобы он не цеплялся за лыжи.
С пиньоном нужно быть очень аккуратным чтобы не повредить мотор. Пиньон для начала необходимо снять, при помощи съемника. После очистить вал и сам пиньон от остатков локтейта, а потом уже заново посадить пиньон на вал, но чуть глубже, и зафиксировать его локтейтом.
Не большое отступление от темы
К моему сожалению, я не был столь осторожен и решил, что мне удастся посадить пиньон глубже без его предварительного снятия. Но пиньон сидел на валу двигателя очень плотно, и после очередного удара по нему не выдержала коллекторная группа внутри двигателя. Она смялась и полностью разрушилась!
Я уже было подумал выбросить этот двигатель, но потом решил попытаться восстановить смятый коллектор.
К сожалению, я не заснял коллектор в разрушенном состоянии, но я думаю, что вы сможете себе его представить.
Но зато я снял этапы восстановления.
Для начала я разогнул в стороны контактную группу, и высверлил остатки эпоксидки внутри нее, до вала двигателя.
Дальше я использовал в качестве оправки сверло диаметром 0.8мм, для того чтобы выровнять контактную группу.
После выравнивания я получил вот такой результат. Оставалось залить контактную группу эпоксидной смолой и отшлифовать ее.
Как это не удивительно, но после сборки двигатель заработал как новый!!!)
Устраняем мелкие недостатки.
Как я уже говорил, качество деталей у HiSky HCP60 мне очень понравилась.
Все пластиковые литые детали выполнены четко и симметрично.
Единственно что мне не понравилось из механики - это сервоприводы.
Они тяжелые, и медленные. Весят они 2.3г, в то время как допустим закрытые сервопривода 5320, от хоббикинга, весят 1.9 г и работают быстрее.
С сервоприводами есть мелкая беда, отверстие в рычаге под тягу, больше чем сама тяга, и тяга в нем очень сильно болтается.
Эта проблема легко устранима каплей суперклея. Лишние люфты в механике никак не добавляют управляемости вертолету.
Еще я обнаружил, что червячный вал в сервоприводах имеет осевой люфт, и этот люфт соответственно передается на тяги. Люфт на сервоприводах был от 0.3 до 0.5мм, что никак не добавляло четкости в управлении.
Червячный вал установлен в два подшипника и имеет стопорное кольцо снизу, со стороны приводной шестерни, и стопорную гайку сверху. Гайка закручена не до упора, и поэтому образуется люфт.
Я попытался подтянуть гайку, но она посажена на локтейт, и мне не удлалось ее сорвать с места, а прилагать большие усилия я побоялся, из-за того, что вал очень тонкий, и его легко повредить.
Так как убрать люфт путем подтяжки стопорной гайки не удалось, я решил пойти другим путем. Я опустил червячный вал вниз, и в зазор, который образовался между нижним подшипником и стопорным кольцом, капнул маленькую капельку красного локтейта. Локтейт высох и послужил новым упором для подшипника.
Осевой люфт червячного вала полностью исчез, а управление вертолетом стало заметно четче!
Так же есть проблемы с разъемами на плате.
Разъемы очень маленькие, с шагом 1мм, и никак не предназначены для нагруженных соединений.
После первой пары полетов у меня перестал работать основной двигатель, и я уже подумал, что он испортился.
Оказалась двигатель был рабочий, а дело было в разъеме двигателя. После того как я пошевелил разъем двигатель снова заработал.
Поэтому я очень рекомендую разобрать разъемы двигателей и поджать в них пины, для хорошего контакта.
Либо вообще избавиться от разъемов и подпаять двигатели напрямую к плате управления. На мой взгляд, если бы производитель использовал разъемы с шагом 1.25, дело было бы гораздо лучше.
Проблемы с подшипниками.
Качество подшипников в цапфах меня расстроило. Во время очередного полета, в одной их цапф рассыпался наружный подшипник, и она оторвалась вместе с лопастью от вертолета. При этом сама цапфа сломалась в месте крепления лопасти.
Я рекомендую первым делом заменить подшипники в цапфах, дабы не они не стали причиной поломки цапф и вертолета.
Проблема с тарелкой автомата перекоса.
Оказывается она плохо просчитана. Ее хода не хватает чтобы реализовать все возможности сервоприводов и она упирается внутренней обоймой в основной вал.
Отсюда проблема с флипами и ролами, все получается размашисто и очень не стабильно, потому, что просто не хватает хода тарелки, чтобы сделать более компактный флип или ролл.
Я немного расточил внутреннюю поверхность, внутренней обоймы тарелки, и это позволило ей отклоняться на большие углы.
После проверил запасную тарелку, оказалось, что она сделана чуть лучше и ход у нее больше.
В общем нужно все проверять, возможно мне попался не удачный экземпляр.
Помимо всего выше перечисленного, я покрыл плату управления и сервопривода защитным электроизоляционным лаком Plastic-71.
Про мелкий ремонт
Первым, что вы обязательно сломаете на этом вертолете, будут цапфы.
Сделаны они хорошо, но вот пластик выбран немного не подходящий.
Обычно отламываются шарики.
Но, как вы уже догадались, все можно починить.
Я решил сделать металлические шарики в цапфах, чтоб они точно не сломались.
Шарик я сделал из маленького шурупчика, который я взял от поломанного сервопривода 5330. Диаметр резьбы на шурупчике 0.85мм, а диаметр гловки 1.7мм
Для начала я сточил, и придал форму шарика диаметром 1.5мм, головке шурупа, затем отполировал её. После одел на ось шурупа небольшой отрезок силиконовой оплетки от провода.
Затем просверлил в сломанной цапфе отверстие под этот шуруп. Для начала сверлим отверстие сверлом 0.6мм, затем рассверливаем сверлом 0.7мм.
После этого вкручиваем шуруп в отверстие на нужное расстояние, а лишний конец резьбы обрезаем. Шурупчик можно вкрутить на красный локтейт, для лучшей фиксации.
В результате цапфы получились как новые, и думаю служить они будут очень долго.
Также можно погнуть межлопастной вал. Он хоть и короткий, но не закаленный. Однако в отличии от межлопастного вала от V977, его легко можно выровнять молоточком. Главное не перестараться!
Ну и на этом, пожалуй, все.
А результат всех модификаций - это красивый вертолет, который стал летать, а не задыхаться от малейшего движения стиков.
После всех модификаций вертолет стал весит 27.4г, что на 2.1 г легче чем сток.
Летать вертолет стал очень даже хорошо, и мощности стокового двигателя вполне хватает.
Итак, дано монитор для FPV полетов FEELWORLD FPV - 718 HD. www.feelworld.org/#!online-store/c14b9/!/Feelworld…

Все в нем хорошо, и показывает отлично, и цвет белый, и выходы\входы все есть, но он без встроенного DVR.
Я решил это исправить при помощи внешнего DVR, для этого был куплен вот такой рекордер banggood.com/Mini-DVR-Video-Audio-Recorder-For-FPV…

Решено было встроить его в монитор.
Внутри монитора места оказалось совсем немного, но я таки нашел куда можно установить плату DVR- рекордера.

Так как питать DVR я хотел от монитора, то решено было сделать землю общей для плат монитора и DVR.
Плата рекордера была подпаяна на 4 перемычки, к плате монитора так, что минус монитора соединился с минусом DVR.
Дальше AV-OUT рекордера был соединен с AV-IN монитора, а AV-IN рекордера с AV-OUT монитора, но не на прямую а через ползунковый переключатель. который по очереди соединяет либо AV-OUT рекордера с AV-IN монитора, либо AV-IN рекордера с AV-OUT монитора. Это сделано для того, чтобы картинка, которую выдает рекордер не зацикливалась, поступая на вход самого рекордера. Переключатель припаян металлическим корпусом к плате монитора и выведен на боковую панель.
Для управления рекордером предусмотрено 3 кнопки, и так же есть гнездо для выносных кнопок, которые дублируют родные.
Я воспользовался этим гнездом и вынес кнопки управления на боковую панель монитора. Для это спаял блок кнопок и опять припаял его к плате самого монитора мину к минусу. Дальше осталось лишь подключить 3 управляющие провода и кнопки заработали.
Ну а дальше была доработка самого корпуса монитора , для того чтобы можно было вывести все управляющие кнопки, переключатели, и индикатор работы рекордера.
Первым было вырезано отверстие под microSD карту.

После, отверстие под переключатель AV входов\выходов

Затем, отверстие для кнопок управления и сами кнопки.

Ну и самым сложным было вырезать окошко для индикатора работы рекордера. Окошко справа, было сделано точно таким же, как и оригинальное, с левой стороны монитора и так же, как и оригинальное, закрыто прозрачным пластиком. Индикационный светодиод DVR был перенесен на обратную сторону платы монитора, так чтобы он оказался под окошком, которое было для него сделано. Я решил использовать светодиод синего цвета.


На этом переделка завершилась)
Картинки открываются большими, если открыть в новой вкладке.
Это продолжение предыдущей статьи, про напечатанный на 3D-принтере вертолет с лопастями 120мм.
После испытания пробной версии rcopen.com/blogs/198531/21630 , я учел все недоработки, усилил модель, и напечатал новую раму для вертолета.
Рама получилась очень жестка и прочная, но и прибавила в весе пару гамм.
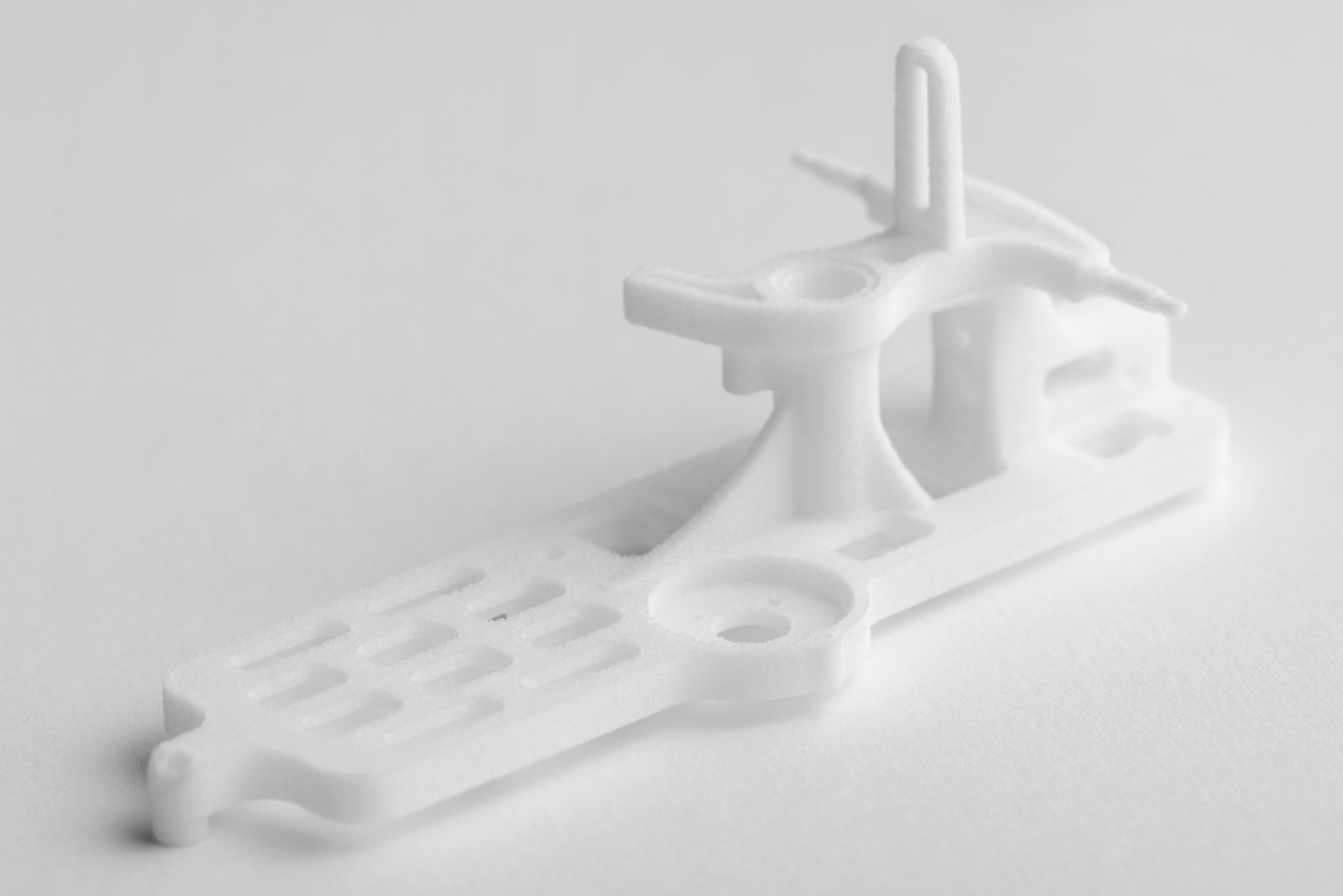
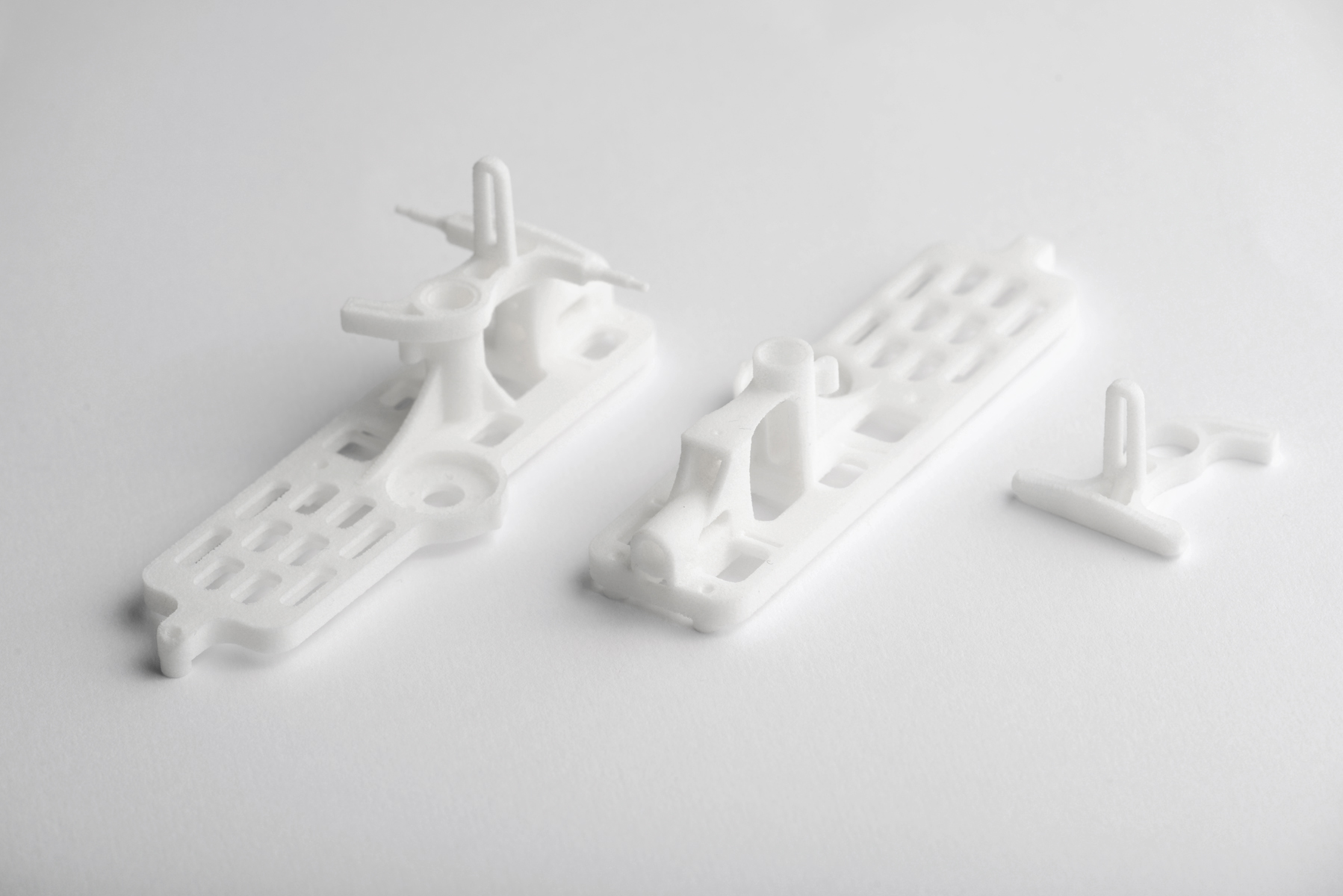
Вес рамы вышел такой же как у V977 - 5 грамм.
Ну вот собственно говоря готовый результат

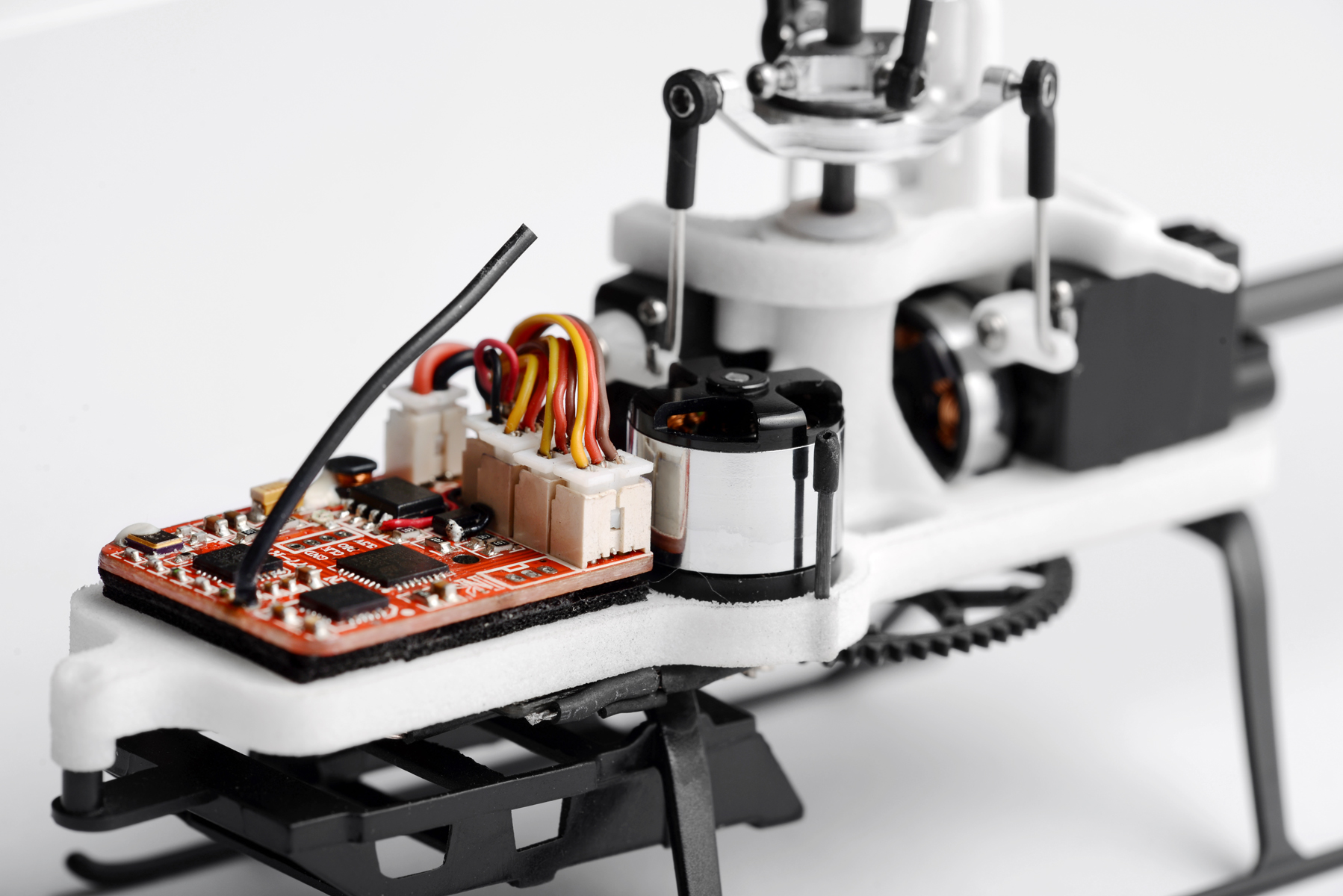
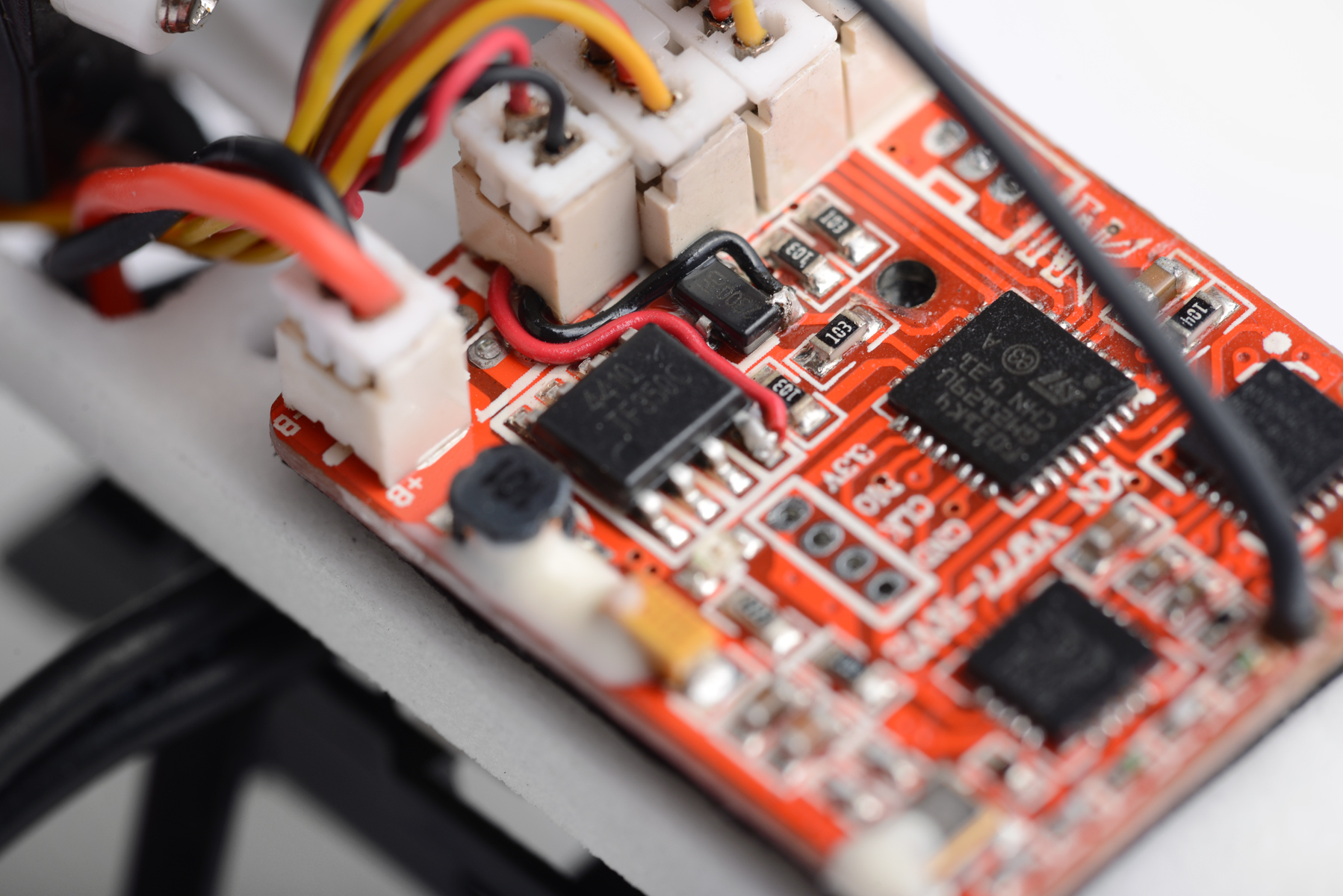


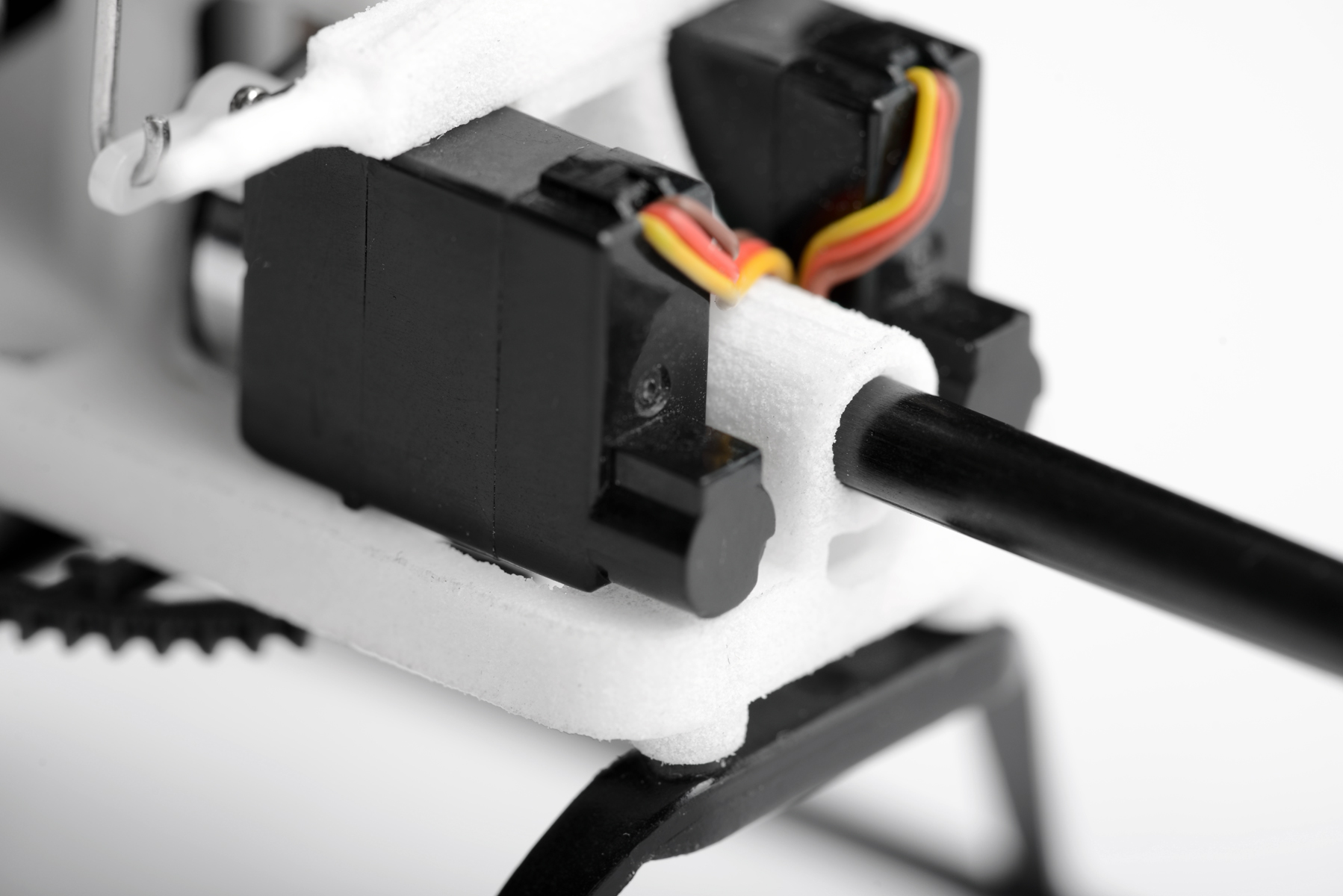
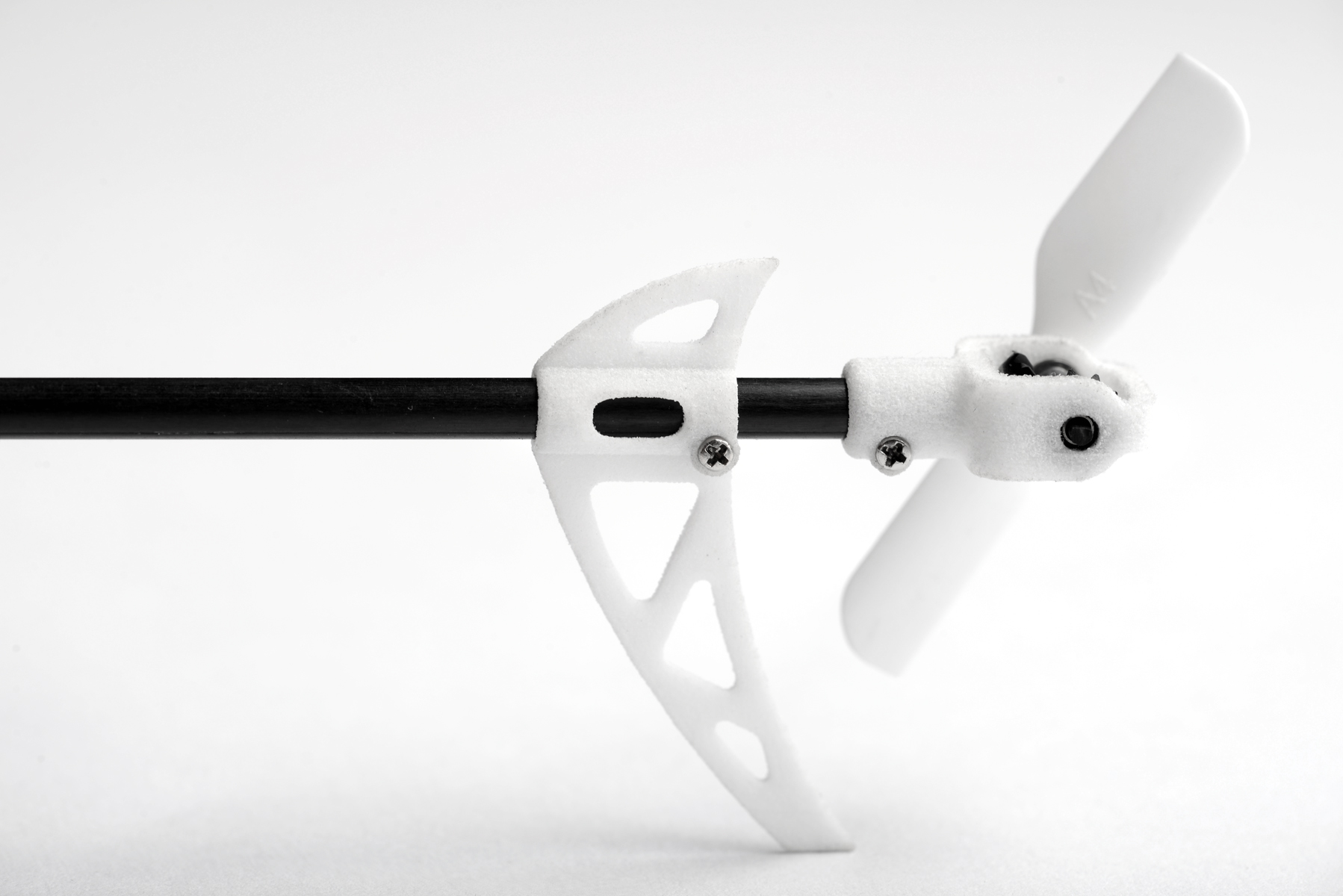

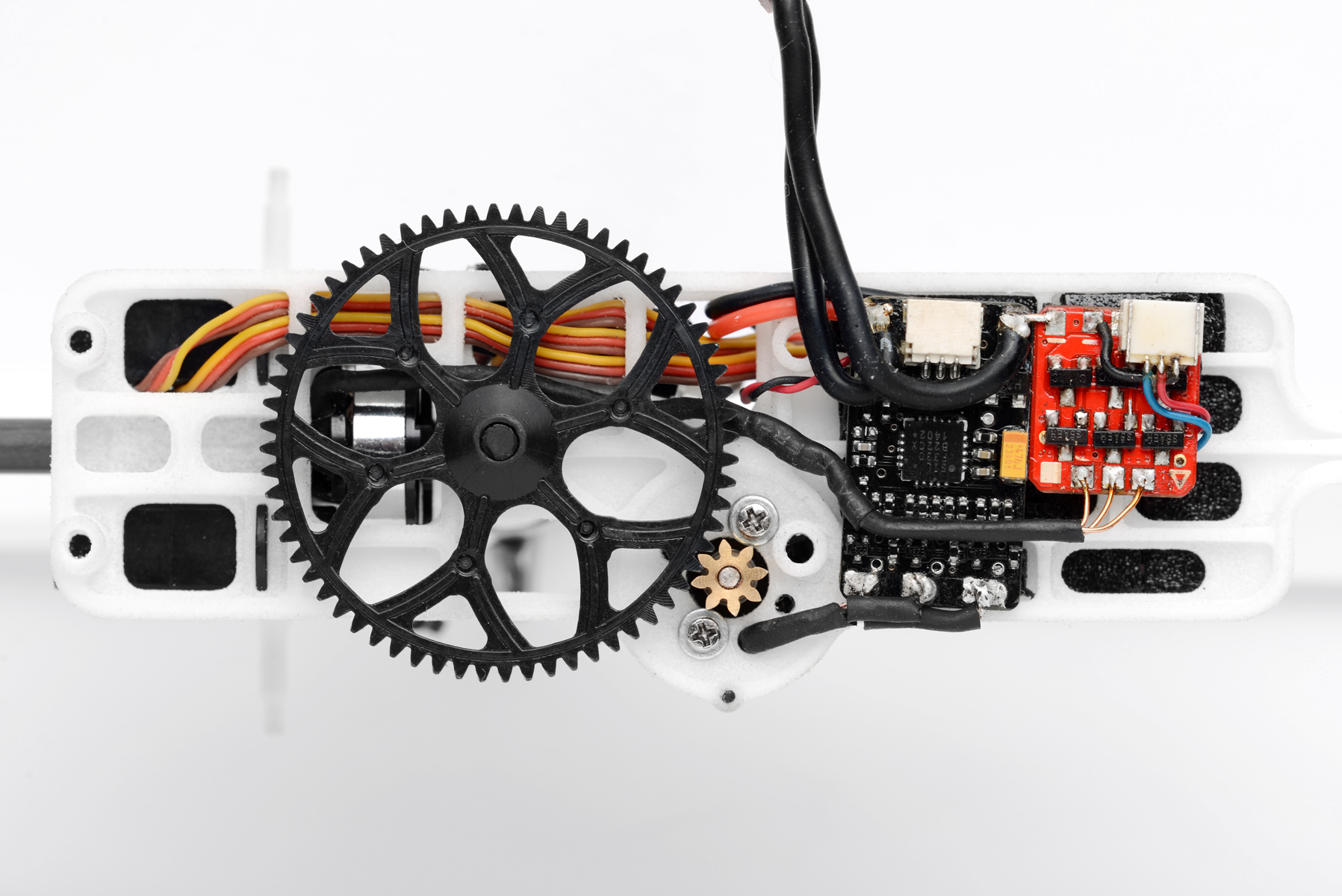
Теперь немного подробнее о том, что было сделано.
Усилил раму. Практически все стенки стали толщиной 1.5мм. Доработал кейс хвостовой балки. Добавил усилители на колонну основного вала и соединил колонну перемычкой с кейсом хвостовой балки. Усилил держатели сервоприводов.
Переработал хвостовой кейс. Усилил и сделал его под подшипники без фланца. Использовал такие же подшипники как стоят в цапфах. Они лучше по качеству и легче.
Изменил форму хвостового плавника, так на мой взгляд смотрится более гармонично.
Тип крепежа плавника к балке оставил прежний, полевые испытания показали, что он отлично работает!
Переработал плату управления. Перенес все разъемы назад. Теперь все провода выходят из одного места, смотрится красиво и аккуратно.
Установил основные лопасти от ХК К123. Они лучше по качеству чем от V931.
Толще и шире на 0.1мм, длиннее на 1мм, и самое главное, чуть жестче.
Покрыл раму, для защиты от грязи, электроизоляционным лаком Plastic-71.
Лак бесцветный, и легко растворяется спиртом. На свойства пластика не влияет
Вес тушки вышел 49г.
Теперь самое интересное, что по чем и где.
Печать рамы в www.meltwerk.com/en/index.php будет стоить порядка 8 евро + 6 евро доставка по Германии+ дальше доставка куда вам нужно.
То есть если вы живете в Германии, то вам это обойдется в минимум 14-евро. Если вы живете в Москве, то вам это будет стоит еще дешевле, так как в Москве есть фирмы которые печатают практически по таким же ценам, но за доставку вам платить не придется.
Пусть печать будет стоит для ровного счета - 15$
Плата управления от V977/К110 - 23- 28$
banggood.com/WLtoys-V977-Power-Star-X1-6CH-RC-Heli…
banggood.com/XK-K110-RC-Helicopter-Parts-Receiver-…
Основной двигатель HP06V2 16200KV - 40$ (без учета стоимости доставки)
overskyrc.com/hp06v2-16200kv-brushless-outrunner-m…
Хвостовой двигатель HP03S 13500KV - 38$ (без учета стоимости доставки)
overskyrc.com/hp03s-13500kv-genius-cp-helicopter-p…
Основной регулятор МХ-10а - 18$
banggood.com/Walkera-MINI-SUPER-CP-Nine-Eagles-125…
hobbyking.com/…/__25432__Brushless_10A_ESC_for_Mic…
Хвостовой регулятор МХ-3а - 7$ (без учета стоимости доставки)
hobbyking.com/…/__44697__SuperMicro_Systems_Brushl…
Сервопривода HK-5330 - 3шт 11$ (без учета стоимости доставки)
www.hobbyking.com/hobbyking/…/uh_viewitem.asp?idpr…
Лопасти от ХК К123 - 5$
banggood.com/XK-K123-6CH-Brushless-AS350-Scale-RC-…
Хвостjвой винт от V931 - 2.2$
banggood.com/WLtoys-V931-RC-Helicopter-Parts-Tail-…
Хаб от heli-factor - 10$ (без учета стоимости доставки)
www.miracle-mart.com/store/index.php?main_page=pro…
Цапфы от heli-factor - 15$(без учета стоимости доставки)
www.miracle-mart.com/store/index.php?main_page=pro…
Тарелка от heli-factor - 12$(без учета стоимости доставки)
www.miracle-mart.com/store/index.php?main_page=pro…
Межлопастной вал от V977 - 3$
banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Демпфера от V977 - 1.2$
banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Набор тяг от V977 - 2$
banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Основной карбоновый вал от V977 - 1.3$
banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Подшипники - 4шт - 4.3$
banggood.com/WLtoys-V930-V966-V977-V988-RC-Helicop…
Основная шестерная от v977 - 2.6$
banggood.com/WLtoys-V930-V966-V977-V988-RC-Helicop…
Пиньон на основной двигатель - 1.4$
banggood.com/WLtoys-V930-V977-RC-Helicopter-Spare-…
Набор шестеренок для хвоста от Walkera V120D02S - 2.3$
banggood.com/Wholesale-Walkera-New-V120D02S-RC-Hel…
Приводной вал для хвоста от Walkera V120D02S - 3$
banggood.com/Wholesale-Walkera-New-V120D02S-RC-Hel…
Карбоновая трубка для хвостовой балки 4*2мм - 3$ за 1 метр
Набор винтиков от V977 - 1.2$
banggood.com/WLtoys-V977-Power-Star-X1-6CH-RC-Heli…
Лыжи от V977 - 1.7$
banggood.com/WLtoys-V930-V977-6CH-RC-Helicopter-Pa…
Канопа от V966 - 4$
banggood.com/WLtoys-V966-Power-Star-1-6CH-RC-Helic…
Расходные материалы, провода, разъемы, скотч, и т.д. - 10$
Стоимость доставки с трех разных магазинов около - 15$
Итого выходит страшная сумма - 252$
В общем птичка удалась!
А вот небольшое видео полета.
Полетав некоторое время на данном вертолете и на v977 с точно такой же платой управления и силовой частью, могу сделать некоторые выводы различиях и о качестве полета.
Тушка, с моей рамой, и хвостовым мотором внутри нее, летает стабильнее и плавнее. По рудеру практически нет раскачек хвоста после его резкой остановки.
По элеватору полностью исчезли раскачки хвоста после выполнения флипов. Флипы получаются плавные и без колебаний хвоста после завершения флипа.
По общим впечатлениям полет стал немного плавнее и собраннее, без лишних раскачек.
P.S.
Картинки открываются большими, если открыть их в новой вкладке!
Итак, хочу представить вам свой вариант на тему V977 - К110.
WLToys V977 и XK К110, это довольно популярные вертолеты, не имеющие особых конкурентов в своем классе. Они можно сказать братья, лишь с мелкими отличиями.
Как и у любого массового и доступного по цене продукта, есть ряд своих достоинств и недостатков. Перечислять я их все не буду, в моем дневнике вы сможете найти тему по 977 с подробным описанием. Здесь же я хочу рассказать что получилось у меня создать на базе доступных запчастей от этих, и не только этих, вертолетов, а также при помощи 3D моделирования и последующей 3D печати.

Началось все с v977, на которых я учусь летать уже второй год. За это время многое было переделано и переосмыслено в конструкции этого вертолета, но стоковая рама накладывала свои ограничения и не позволяла вывести усовершенствования на новый уровень.
Я решил создать свою раму, главной особенностью которой является расположение хвостового двигателя внутри рамы.
Реализовать данную идею получилось не сразу, было несколько вариантов конструкции, но в конце концов я выбрал самую простую и удачную на мой взгляд.
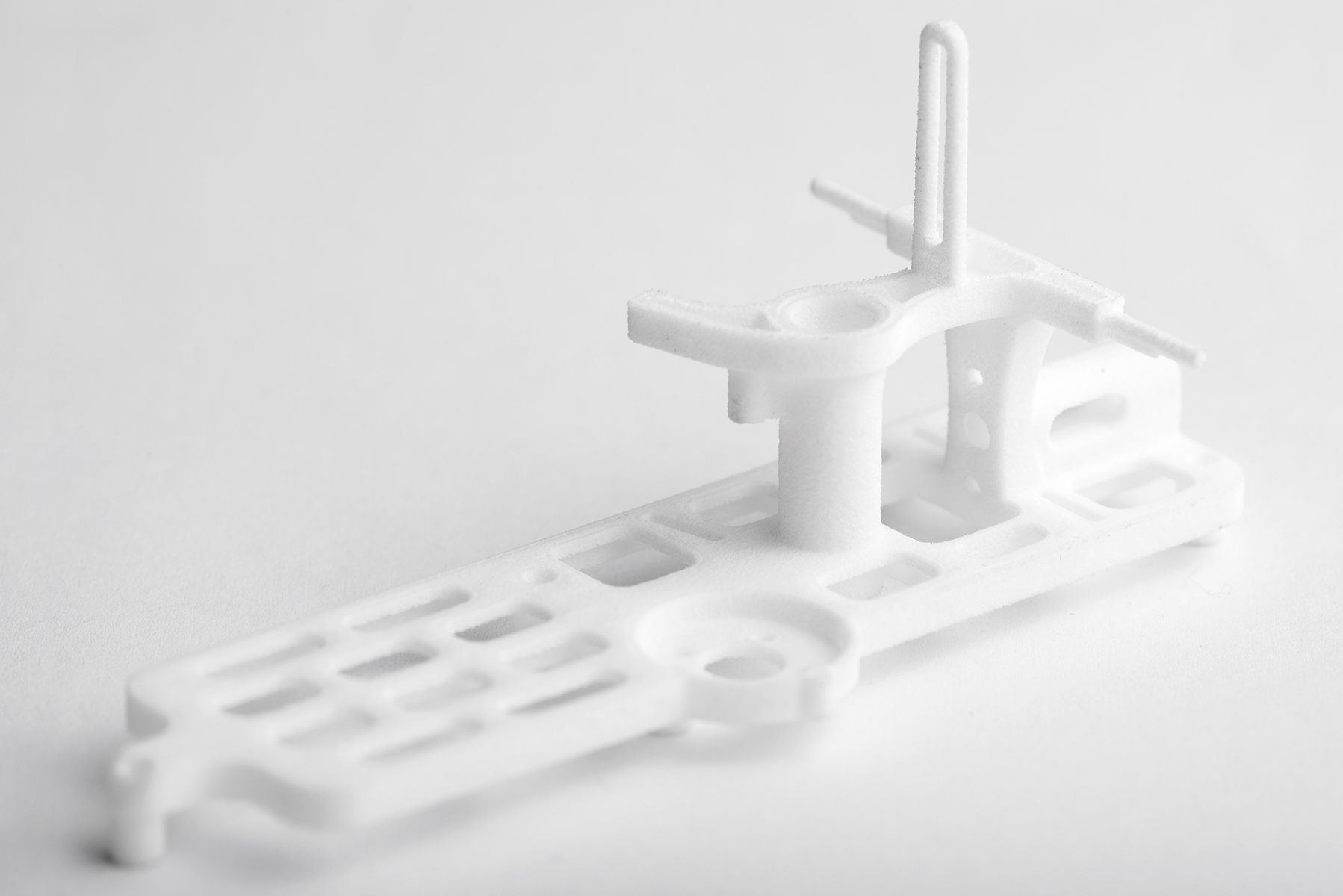

Решения перенести хвостовой мотор внутрь рамы было вызвано множеством факторов.
Во первых - это связано с крашеустойчивостью вертолета. Хвостовой мотор на конце балки не самое лучше решение, в плане защищенности самого, двигателя при авариях. Один раз, при неудачном падении, я таки погнул ступицу колокола у хвостового двигателя. Ступицу я выровнял, мотор этот работает отлично и по сей день, но это не вариант решения проблемы.
Во вторых - это связано с полетными качествами вертолета. Грузик, в виде хвостового двигателя, на конце хвостовой балки, никак не способствует выполнению многих фигур пилотажа.
В третьих - вес хвостового двигателя добавляет инерционности хвосту.
Построение рамы я производил в доступном и простом редакторе FreeCAD.
Последующая печать была выполнена по технологии SLS, материалом РА2200.
Данный материал очень интересный, но имеет свои особенности, о них чуть ниже.
Вот что у меня получилось:

Лопасти от V931, лыжи от V977, канопа от V966.
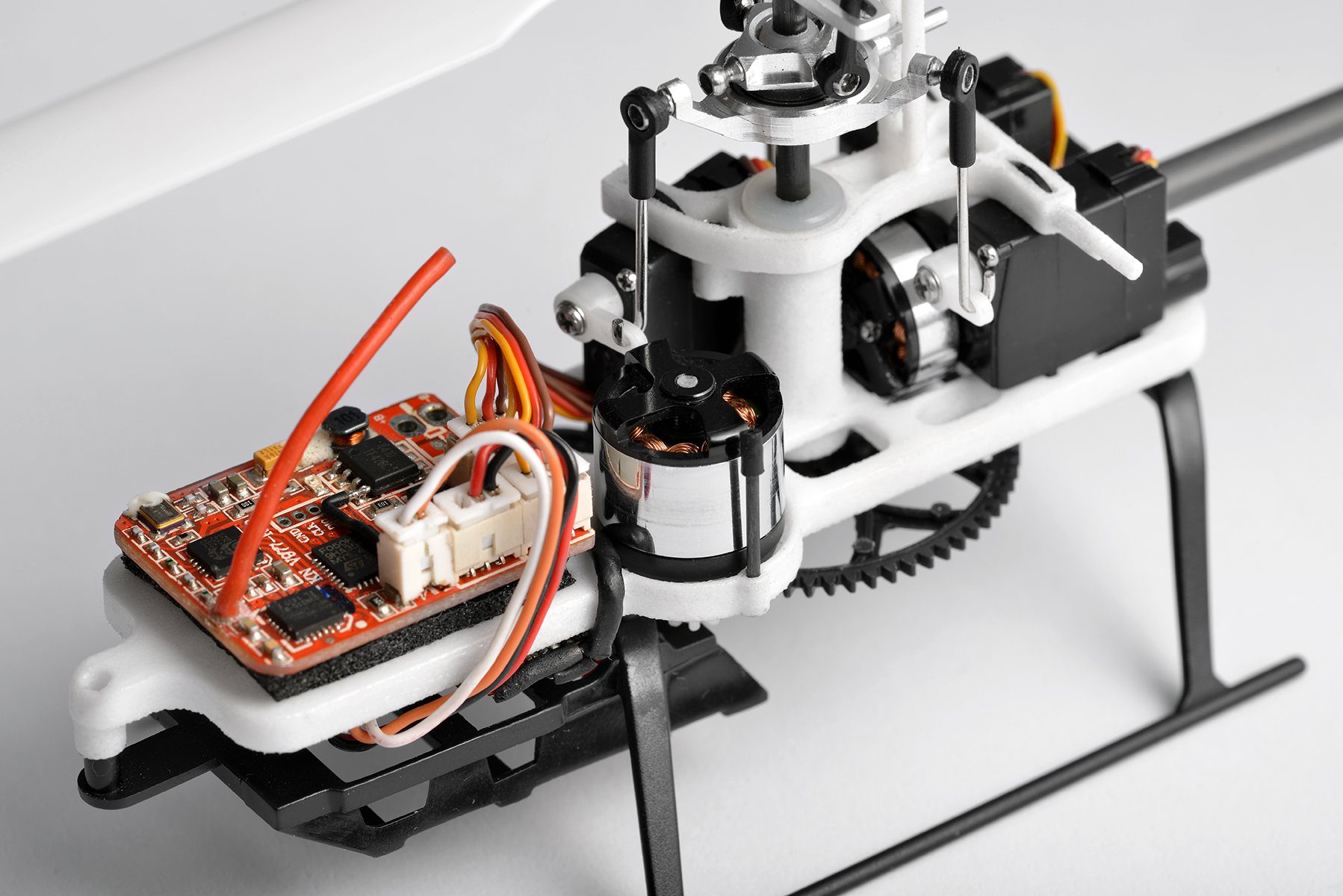
Плата управления от V977. Основной двигатель HP06S 16200kv, хвостовой
HP03S 13500kv. Регуляторы МХ-10а и МХ-3а
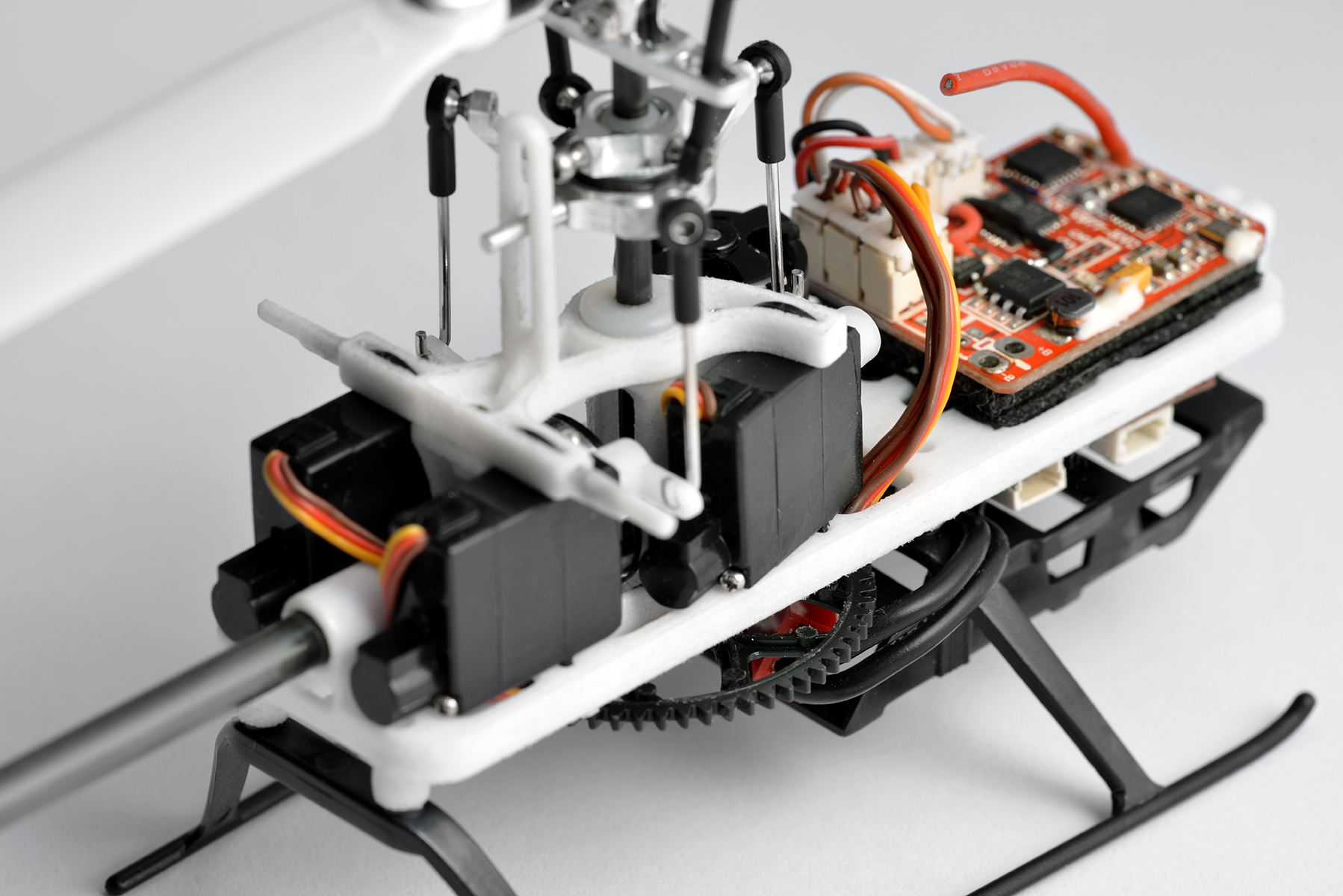
Стандартные сервоприводы от V977/К110. Голова от Heli-Factor.
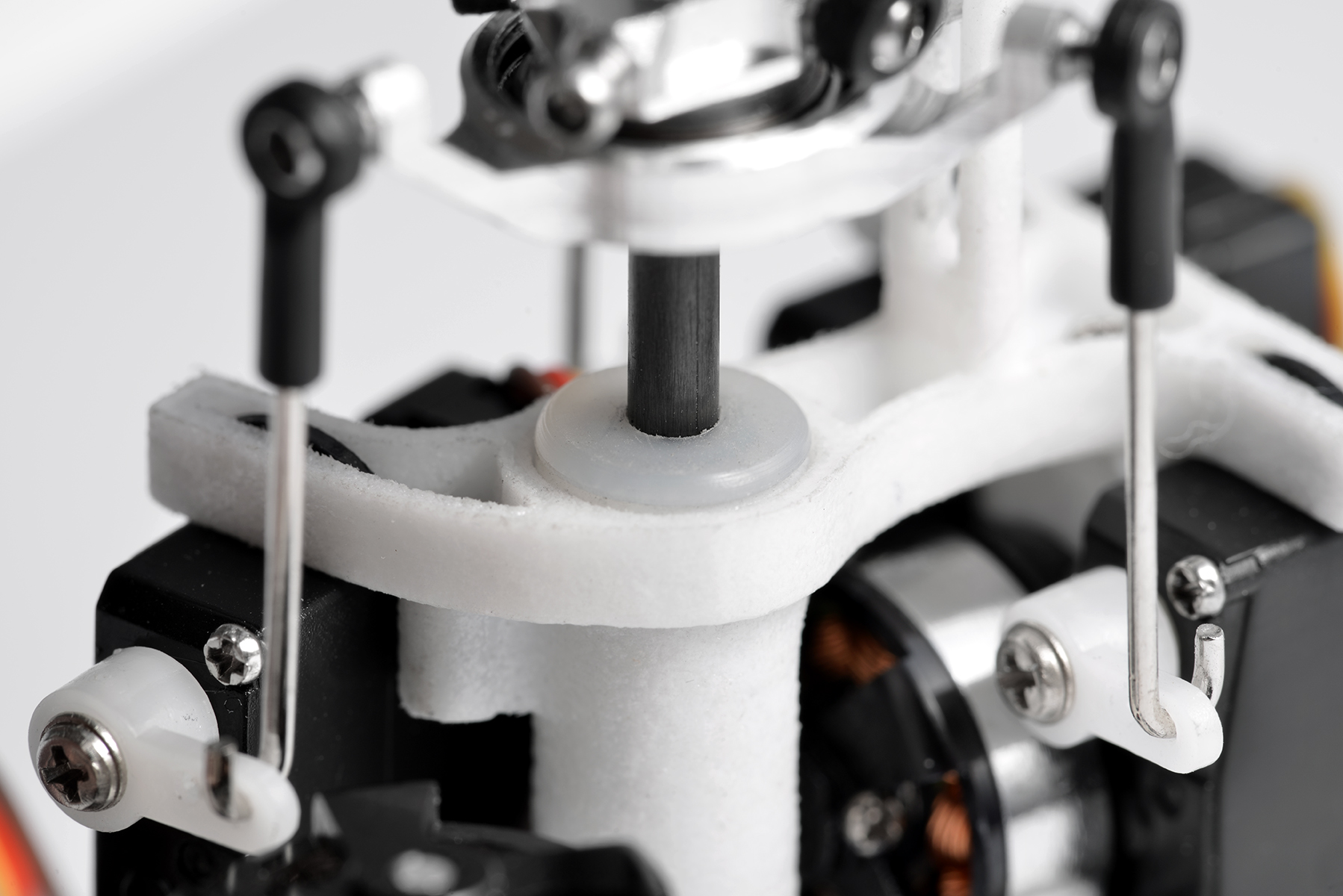
Держатель сервоприводов, крепится к раме двумя шурупами. Стопорное кольцо выточенное из твердого капрона. Основной вал выполнен из карбонового прутка 2.5мм
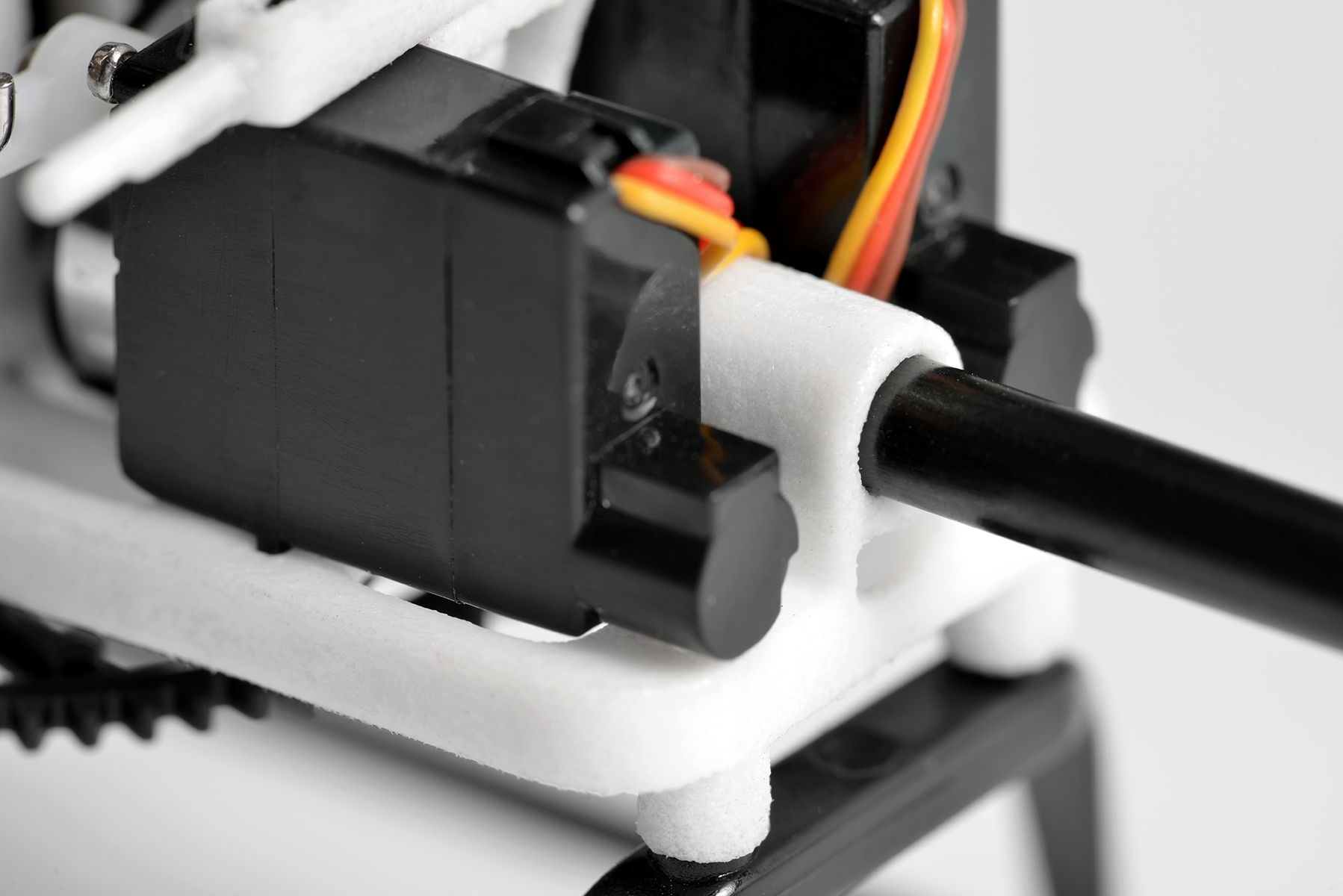
Кейс хвостовой балки. Внутри кейса шлиц, и такой же шлиц на самой балке, не позволяющий ей проворачиваться в кейсе. Балка плотно вставляется в кейс. Сама балка выполнена из карбоновой трубки 4*2мм, длинной 153,5мм.
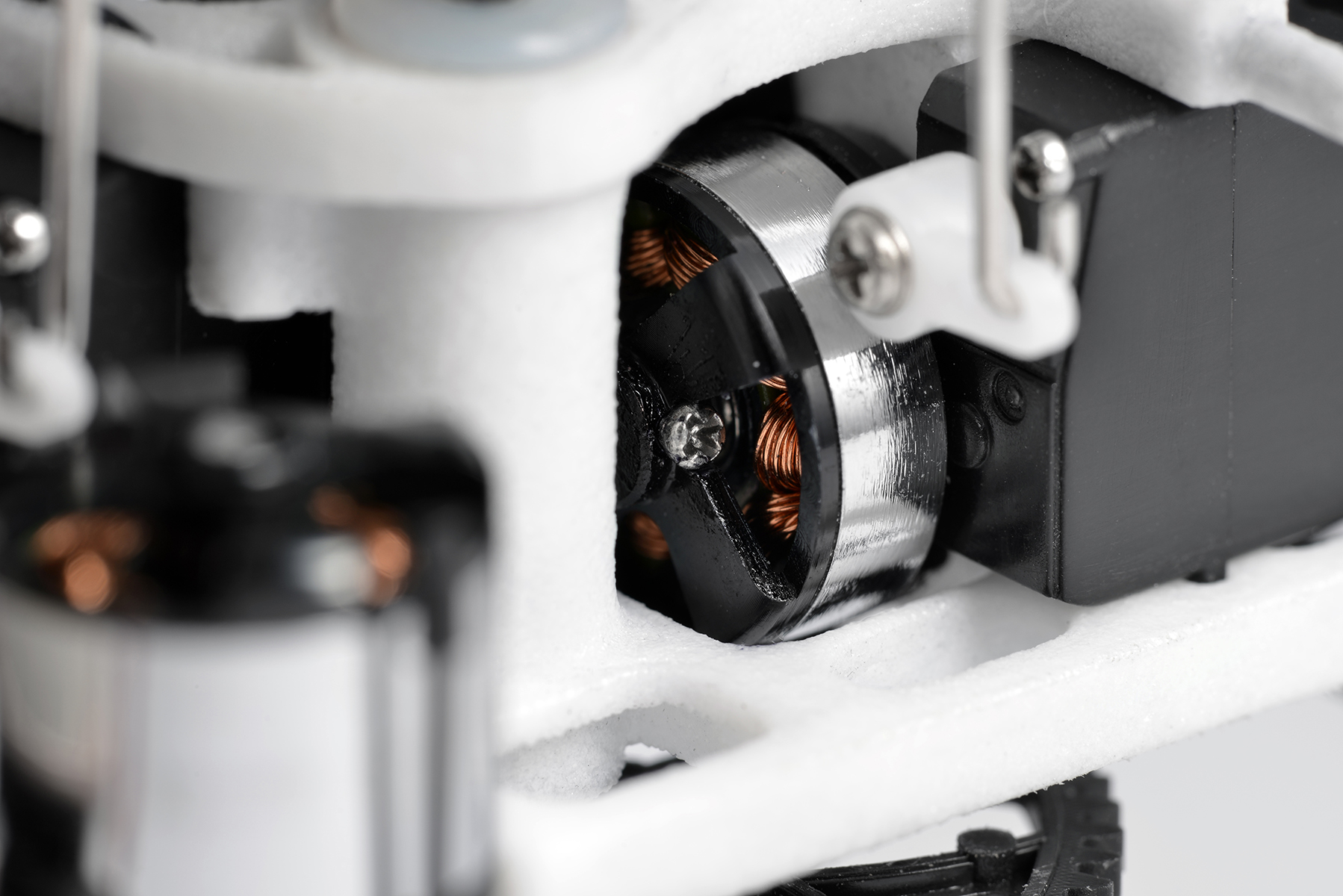
Хвостовой двигатель расположен между задних сервоприводов. Нижняя часть двигателя в которой находятся крепежные отверстия была немного доработана, чтобы не мешать установке сервоприводов. Было срезано две боковые части, как раз по крепежные отверстия, а на оставшуюся пару крепежных отверстий закреплен сам двигатель.
На ступице колокола виден болтик с 1мм резьбой. Это обычный болтик от межлопастного вала. Данный болтик фиксирует приводной вал хвостового ротора. Для это в ступице было просверлено отверстие и нарезана резьба. На краю вала присутствует шлиц, в который и упирается этот болтик.
Приводной вал хвостового ротора - это вал от Walkera V120D02S.
Данный вал служит как приводным валом, так и валом самого двигателя. Я решил упростить конструкцию и не делать никаких переходных муфт в узле вал-двигатель. Это позволяет убрать лишние вибрации, которые могут появиться в муфте, правда немного усложняет сборку хвоста.
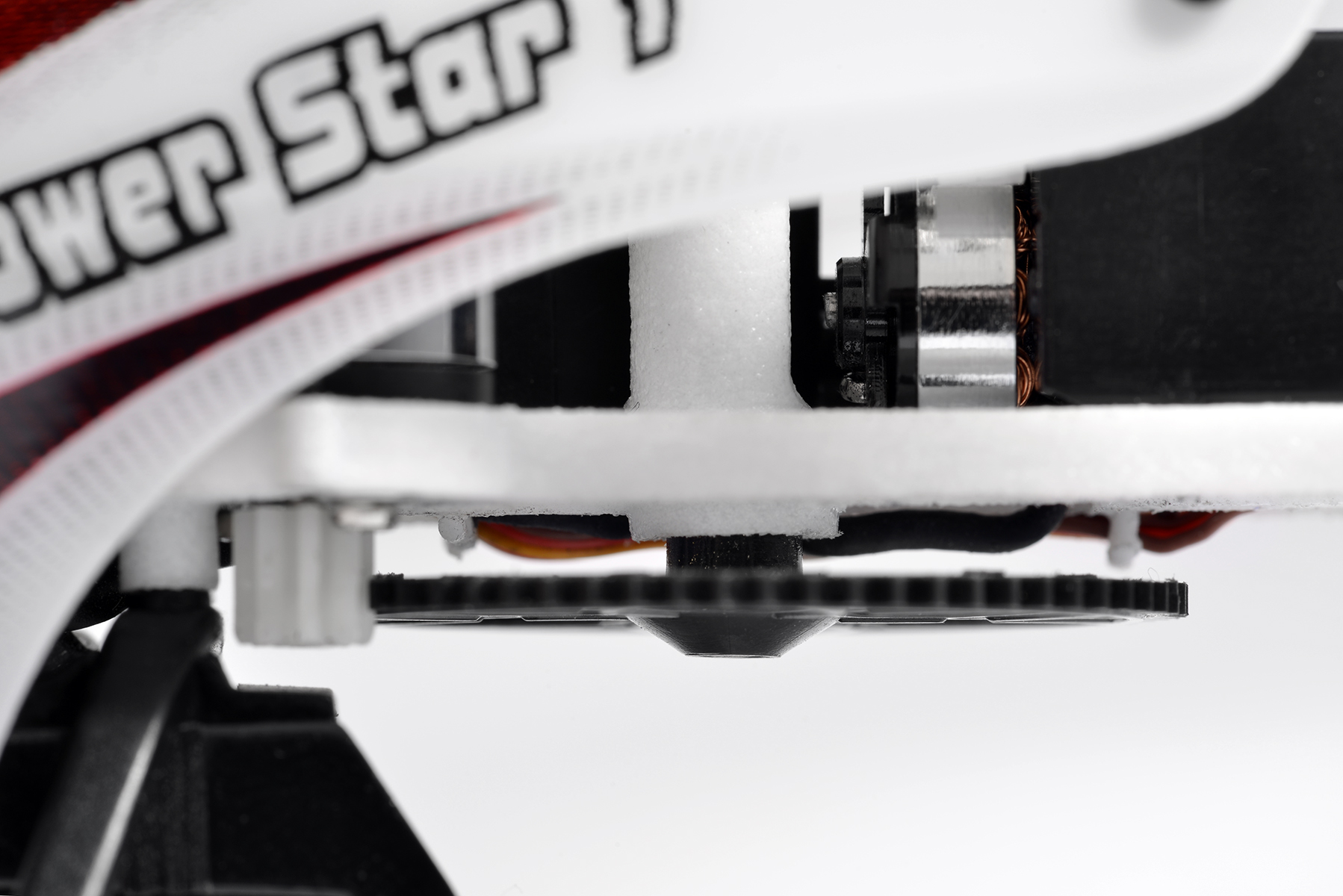
Основная шестерня перевернута и не имеет никаких шлицов . Плотно одевается на вал и ничем на нем не фиксируется. Между шестерней и подшипником на валу надето металлическое стопорное кольцо, которое упирается в подшипник и не позволяющее валу двигаться вверх.

Хвостовой кейс выполнен под конические шестерни и подшипники от Walkera V120D02S

Хвостовой плавник крепится на балке при помощи шурупа, который частично входит в тело самой балки. Под шуруп в балке сделана небольшая проточка.
Хвостовой кейс крепится к балке также, как и плавник, плюс имеет шлиц, такой же, как и у кейса хвостовой балки, который не дает ему проворачиваться.
Вал хвостового винта диаметром 1.5мм, выполнен из карбона. На валу сделан шлиц под шестерню.
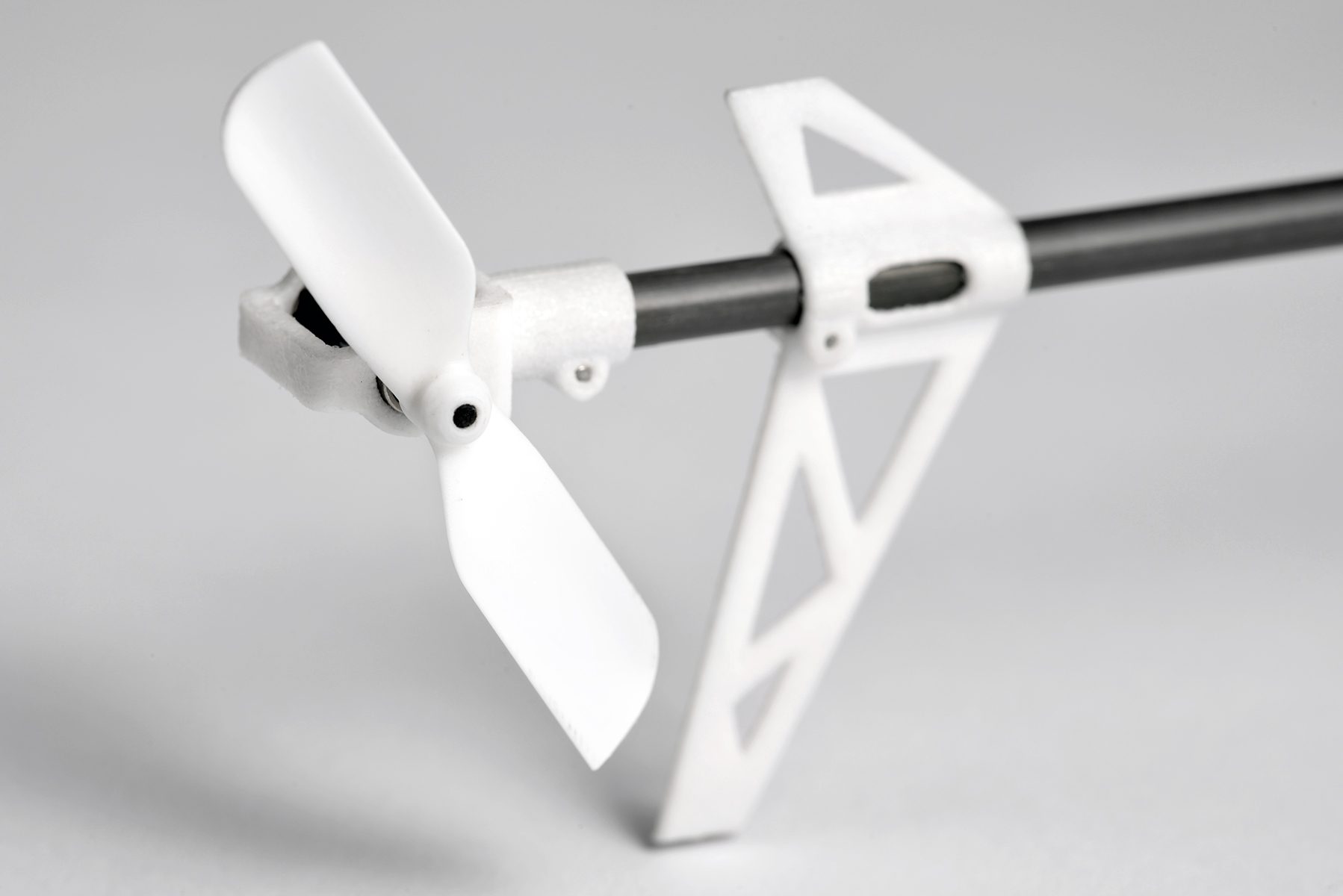
Хвостовой винт от V931, обрезан до 44мм. Отверстие под вал рассверлено.
Вес вертолета без аккумулятора вышел 46.3г
Ну а теперь о результате.
Результат категорически положительный.
Не смотря на то что это пробный вариант, так сказать первая ласточка, она без проблем собралась и полетала, и полетела очень хорошо.
Хвост реально не узнать! Хвост четкий, резкий с четкими остановками, без раскачки после торможения. Инерция у хвоста отсутствует. Это реально ощущается, и летать на второй тушке с мотором на хвосте стало не так приятно.
Я переживал за то, что после переноса хвостового двигателя в раму сместится центр тяжести, поэтому немного сместил лыжи в сторону хвоста чтобы сместился аккумулятор, который в них вставляется. Но мои опасения были напрасными. Центр тяжести никуда не сместился. В частности в этом виноват довольно тяжелый металлический приводной вал хвостового ротора, весит он 2.3г. В дальнейшем я попробую сделать его карбоновым, а в случаи необходимости компенсировать смещение центра тяжести положением аккумулятора.
Если коротко резюмировать, то хвостовой мотор на конце хвостовой балки - это зло!
Конечно же я учел не все нюансы, отсутствие конструкторского образования дает о себе знать, но в основном это мелкие правки не влияющие на сам полет.
Но есть один нюанс, который я не учел и который нужно учитывать при любом проектировании. Нюанс это связан с материалом.
SLS печать меня очень порадовала качеством и хорошей точность. Размеры немного гуляют в пределах одной двух десяток по габаритам, но это не критично и на сборку совсем не влияет.
Что касается материала РА2200 - материал интересный, очень легкий, пока он тонкий, он не ломается, его можно согнуть и выровнять обратно. Но с набором толщины становится более хрупким. Рама из него вышла весом всего 3 грамма, в то время как стоковая рама от 977 весит 5 грамм. Но за его легкостью кроется другая его особенность, о которой я не знал. Он довольно гибкий. По упругости его можно сравнить с пластиком, который используется в стоковых лыжах от V977.
Этой жесткости хватает для держателя сервоприводов , для хвостового плавника и хвостового кейса, но для самой рамы этой жесткости уже мало.
Поэтому при использовании в печати материала РА2200 я могу порекомендовать усилить конструкцию в среднем в полтора раза. При этом вы получите хорошую жесткость и вес. Ну а то, что материал сложно сломать, будет только плюсом. Из минусов материала можно отметить пористую поверхность и маркость, в случае белого цвета.
На самом деле есть большое количество разных материалов для печати по технологии SLS и в том числе разных полиамидов. Есть такой полиамид как РА3200, и по характеристикам он жестче чем РА2200. Я попытаюсь найти доступную по цене печать из РА3220 и уже из него напечатать окончательный вариант рамы. Ну а если не найду, то просто усилю данную раму и напечатаю ее тем же РА2200.
Тем не менее я нашел временное решение, которое позволило собрать и опробовать данную конструкцию рамы. Я пропитал раму цианакрилом (суперклеем). Это повысило ее жесткость до вполне приемлемой, но сделало ее хрупкой. Поэтому поступать также я советую только при большой необходимости.
Также очень бы хотелось услышать ваше адекватное мнение по всему этому поводу. Любые полезные советы с радостью принимаются.
Это не последняя модель. В скором будущем будет окончательный вариант данной модели и еще, надеюсь не одна модель, другого размера, рамы которох уже почти спроектированы.
Свою модель я печатал тут http://www.meltwerk.com (не реклама)
Так же хотел сказать спасибо за помощь в реализации данного проекта Александру Babay и Владимиру kycerjaska
А летает этот вертолет вот так.
Погода не особо летная. Ветерок его таки сдувал, поэтому получилось не сильно интересно.
Что могу сказать по поводу полета - летит вертолет по другому!
Легкий хвост это реально классно! Хоть и пилот из меня никакой, но даже я чувствую положительную разницу.
Флипует вертолет гораздо приятнее, легче и не через хвост. Полет стал боле воздушный что-ли.
Я думаю что опытные пилоты, которые умеют летать сложные фигуры, оценили бы все перемены в управляемости, гораздо лучше меня.
Видео немного дерганое, оператор впервые снимал вертолеты и не подготовился)
P.S.
Картинки открываются большими, если открыть их в новой вкладке!
Дабы не писать каждый раз одни и те же ответы на вопросы, что взять из запчастей для WLtoys V977.
решил сделать эту запись
Для начала читаем предыдущие части о WLtoys V977.
rcopen.com/blogs/198531/20779
rcopen.com/blogs/198531/20780
после определитесь с запчастями.
Межлопастной вал - берите много сколько не жалко хотя бы 4 комплекта! banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Основных шестеренок - 2-3 штуки. banggood.com/WLtoys-V930-V966-V977-V988-RC-Helicop…
Хвостовая балка - 2-3 штуки. banggood.com/WLtoys-V930-V977-RC-Helicopter-Parts-…
Лопасти от V931 или от К123 - 2 комплекта, будет у вас 6 пар лопастей, хватит очень на долго они не убиваемые! Подделка мягче, оригинал жестче.
banggood.com/XK-K123-6CH-Brushless-AS350-Scale-RC-…
Хвостовой мотор - пару штук вот таких banggood.com/SUT-Tail-Powerful-Motor-For-Tail-Blad…
либо от ХК К110 banggood.com/XK-K110-RC-Helicopter-Parts-Tail-Moto…
Хвостовой винт под вал 1мм 3 - 4 штуки, либо подрезанные от V931 banggood.com/WLtoys-V931-RC-Helicopter-Parts-Tail-…,
либо от ХК к 120 banggood.com/XK-K120-RC-Helicopter-Parts-Tail-Roto…, либо валкировские, либо вот такие banggood.com/Super-CP-WLtoys-V977-Universal-Tail-B…
Алюминиевое крепление для хвостового двигателя - 1 штука banggood.com/Tail-Motor-Mount-for-WLtoys-v966-v977…
демпфера - 2 набора. banggood.com/WLtoys-V966-V977-RC-Helicopter-Parts-…
Сервы - 3 штуки www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Комплект подшипников для основного вала и для цапф - 1 штука banggood.com/WLtoys-V930-V966-V977-V988-RC-Helicop…
Канопа - 1 штука. banggood.com/WLtoys-V977-Power-Star-X1-6CH-RC-Heli…
Рама - 1 штука banggood.com/WLtoys-V977-Power-Star-X1-6CH-RC-Heli…
Лыж - 2 штуки banggood.com/WLtoys-V930-V977-6CH-RC-Helicopter-Pa…
Основной вал возьмите карбоновый, но учтите они на кручения слабые, берите много, либо купите пруток карбоновый 2.5мм и делайте валы сами, как я описал в предыдуших частях обзора. banggood.com/WLtoys-V966-V977-Upgrade-Parts-2_5mm-…
По поводу хаба, цапф и тарелки.
Послушаете совета и не берите пластик, это деньги на ветер.
Возьмите алюминий - в этом размере и весе вертолета он не убиваемый.
Либо комплект для ХК К110
banggood.com/XK-K110-K120-Metal-Conversion-Upgrade…
А еще лучше возьмите комплект от хелифактора hobby-direct.com/v966-977-cnc-aluminium-swash-plat…
Улучшение полетных характеристик для неограниченного бюджета
Металлический апгрейд
Это первое что я очень рекомендую сделать.
Вы скажете зачем это новичку, он же его погнет, поломает! А я скажу что вы ошибаетесь.
Мне до сих пор не удалось погнуть и поломать что-либо из металлических деталей.
Второй вопрос который волнует умы всех граждан - он же тяжелее пластика.
Да, металл тяжелее, но во первых апгрейды бывают разные, и по весу они отличаются. Но самое главное что если вы будете использовать самый дешевый, из доступных, металлический апгрейд,
banggood.com/WLtoys-V977-V966-Metal-Conversion-Upg… без каких либо доработок, при этому будете использовать карбоновый основной вал - вертолет потяжелеет максиму на 1 грамм! А так как в этой части мы рассматриваем апгрейды не только головы но и двигателей с регуляторами, то скажу вам заранее, после всех модификаций ваш вертолет станет легче стока!
Итак, в продаже имеются разные варианты.
banggood.com/WLtoys-V977-V966-Metal-Conversion-Upg…
Металлический апгрейд для XK K110 banggood.com/XK-K110-K120-Metal-Conversion-Upgrade…
www.heli-factor.com/shop/index.php?main_page=index…
www.xtreme-production.com/xtreme/index.php?main_pa…
Я в свою очередь рекомендую остановить свой выбор на апгрейде от heli-factor.com, либо апгрейде для XK K110 c banggood.com
Металлические детали от heli-factor.com очень хорошего качества. Он легче остальных апгрейдов, кроме апгрейда от xtreme-production.com.
Детали от heli-factor.com отличаются более грамотным конструктивом.
Тарелка автомата перекоса имеет подшипник большего внутреннего диаметра, что позволяет ей отклонятся на больший угол не задевая при этом основной вал.
Хаб выполнен с прорезью вдоль основного вала и фиксацией на валу при помощи болта и гайки. Такое решение очень хорошо фиксирует хаб на валу, без каких либо люфтов.
В своих вертолетах я пока использую усовершенствованный апгерйд от banggood.com который мне пришлось купить на ebay. rcopen.com/blogs/198531/20404
А так же доработанный кривой китайский комплект который я категорически не рекомендую покупать, banggood.com/…/WLtoys-V977-V966-Metal-Conversion-U…,
в сочетании с тарелкой автомата перекоса от heli-factor.com которую я немного модифицировал.
По мимо того что ранее я заменил родной латунный рыбий глаз на сделанный мною капроновый, я так же попытался ее еще облегчить.
Снял длинные рога, пользоваться ими смысла нет, циклика хватает с головой и на маленьких рогах.
Спилил часть алюминия. Можно было спиливать еще, но решил оставить на всякий случай, подогнав выступы под размер для маленьких рог. Резьба в них есть можно в случаи чего рога переставить в новые отверстия.
По весу тарелка вышла 1.65г!!! и это очень хороший вес , так как пластиковая тарелка с рыбьим глазом вести 1.5г, и при этом нормально не работает.
Замена основного двигателя и регулятора.
Перепробовав разные варианты двигателей, я уверенно могу сказать, что самым лучшим выбором будет двигатель HP05S!
Приобрести его можно и даже нужно вместе с регулятором MX-10A тут - www.hawk-rc.net/index.php?route=product/product&pa…
Отдельно регулятор - banggood.com/Walkera-MINI-SUPER-CP-Nine-Eagles-125…
Отдельно мотор - www.hawk-rc.net/index.php?route=product/product&pa…
Данный двигатель приятно удивит вас своими возможностями.
Он легче, более оборотистый - 14000kV, и намного мощнее стокового двигателя.
Стоковый двигатель весит 7,2г, а HP05S весит всего 5.2г. Это минус 2 грамма веса!!!
Двигатель очень хорошо держит нагрузку, вертолет остаётся бодрым практически весь полет.
Рекомендую использовать его с 9 пиньоном, собственно он с таким и продается.
Регулятор MX-10A глобально меньше и легче по размерам чем стоковый. А лишний вес нам точно не нужен.
Стоковый регулятор без проводки весит 3г, MX-10A весит 1.1г. Это еще минус 2 грамма веса!!!
На борту он уже имеет разъем для программатора. По настройки регуляторов Александр Кузнецов написал отличную статью в своем блоге
…blogspot.com/…/blheli-brushless-esc-firmware.html
Я установил регуляторы под основной платой и вывел сбоку рамы разъемы для программирования.
Бесколлекторный двигатель на хвост
Для установки БК двигателя на хвост на понадобятся сам двигатель и регулятор.
Двигатель можно использовать
такой - www.hawk-rc.net/index.php?route=product/product&pa…
или такой - banggood.com/Brushless-Upgrade-Tail-Motor-Walkera-…
Во втором варианте колокол находится с противоположной стороны ротора.
Это не самый лучший вариант. При падениях шанс разбить колокол будет гораздо выше.
Поэтому если вы купили данный двигатель, я рекомендую просто аккуратно выбить из колокола вал и переставить его обратной стороной.
На конце вала сделать проточку и установить фиксатор, дабы не потерять колокол при авариях)
Соответственно колокол теперь будет находится со стороны ротора, котрый будет служить дополнительной защитой при авариях.
В качестве хвостового пропеллера, как я уже писал, я использую хвостовой пропеллер от WLtoys v931 подрезанный до 42-45мм.
banggood.com/WLtoys-V931-RC-Helicopter-Parts-Tail-…
Передняя часть муфты сточена для красоты
Для управления двигателем советую использовать регулятор MX-3a. Он очень компактный и легкий.
Перед установкой регулятора подпаяйте к нему разъем для программирования. Куда подпаивать разъем можно посмотреть в документации BLHeli
github.com/…/BLHeli supported SiLabs ESCs.pdf
Регуляторы приклеены к раме на двусторонний скотч.
Провода от регулятора к двигателю используйте диаметром не меньше 0,4мм!
Про настройку регулятора, как я уже писал ранее, можно прочитать тут …blogspot.com/…/blheli-brushless-esc-firmware.html
Для управления регулятором необходим сигнал ШИМ или ФИМ.
ФИМ сигнала для хвоста у нас нет.
Поэтому можно взять ШИМ сигнал с силового ключа для хвостового регулятора.
Я сделал отдельный разъем для основного и хвостового ШИМ сигналов, и подклеил его к боковой стенки разъема питания платы и ФИМ сигнала для основного двигателя.
Это довольно удобное решение позволяющее при необходимости быстро отсоединить плату от регулятора без паяльника.
Питание основной платы я оставил в прежнем разъеме.
Установка БК мотора на хвост приведет к значительному увеличению тяги хвостового ротора, которая может составлять 29-30 грамм, в зависимости от используемого двигателя и пропеллера. Стоковый хвостовой двигатель давит на весах в половину меньше 15-16г.
Усиливаем раму
Раму, как и любой элемент вертолета можно сломать. Чтобы рама не ломалась нужно убрать причину ее поломки.
Причина проста - стойка основного вала крепится к кейсу хвостовой балки в одной точке, и эта точка является самым слабым местом рамы, так как при авариях хвост и ротор могут стремится разлететься в разные стороны. Соответственно в этой точке и происходит разделение кейса хвостовой балки и стойки основного вала.
Для решения этой проблемы нужно добавить точки фиксации стойки основного вала и рамы.
Для этого я смоделировал усилитель, который одевается на стандартный держатель сервоприводов и верхнюю часть стойки основного вала.
Усилитель распечатал на обычном 3D принтере по технологии FDM. Печатать желательно из PLA пластика, он мене хрупкий.
Крепится усилитель к раме через стандартные отверстия в держателе сервоприводов, одновременно прижимая держатель к рама. Для крепежа придется найти более длинные шурупчики.
Небольшой напилинг присутствует для приведения внешнего вида в порядок
На раме это смотрится вот так.
Стойка основного вала теперь зафиксирована гораздо жестче и не в одной точке, и не будет отламываться от рамы.
Все усилителя 0.4г
все желающие могут самостоятельно распечатать и установить его на свой вертолет.
Файл для печати можно взять тут.
yadi.sk/d/7pktpG6srDvmq
Лопасти
После проделанных выше модификаций я обязательно рекомендую использовать лопасти от WLtoys V931.
banggood.com/WLtoys-V931-RC-Helicopter-Parts-Main-…
Лопасти от 931, что с синими концами что с красными, одинаково жесткие но только если они оригинальные!
А то что продает бенггуд это не всегда оригинал. Они тоньше, уже и короче, и соответственно мягче. Мне только 1 раз повезло , бенг прислал синие оригинальные 1 комплект, если б знал, заказал бы два -три.
Все остальное что приходило - все не оригинал, что с беннгуда что с ебея.
Так что где и как лучше искать оригинальные - точно не подскажу.
Вот размеры оригинальной лопасти от 931.
Ширина - 13.05мм
Толщина - 1,6мм
Длина - 124,35мм
А не оригинальные чуток отличаются.
Ширина - 12,95мм
Толщина - 1,5мм
Длина - 123,8мм
Новичкам можно не замарачиваться и заказывать лопасти где удобнее, мягкие лопасти для начала будут лучше.
С красными лопастями хорошо сочетается красная канопа от WLtoys V966
banggood.com/WLtoys-V966-Power-Star-1-6CH-RC-Helic…
Ее необходимо подрезать, дабы она не рвалась при авариях о лыжи и переднюю тягу, и проклеить изнутри скотчем.
Вот пара моих вертолетов в красном и синем.
Итоговый вес тушек получился таким:
Синя тушка - основной двигатель М5, со стоковым регулятором - 46.8г
Красная тушка - полностью БК, основной двигатель HP05S, регуляторы МХ-10а и МХ-3а - 45.6г
Питание
В качестве источников питания я рекомендую использовать вот такие аккумуляторы на 520мАч
banggood.com/5-x-V930-V977-RC-Heli-Parts-3_7V-520m…
По токоотдаче они гораздо лучше стоковых и время полета на них больше.
Для тех кому уже не хватает аккумуляторов на 520мАч я рекомендую использовать аккумуляторы на 600мАч от хоббикинга. hobbyking.com/…/__20385__Turnigy_nano_tech_600mah_…
Они мне очень понравились, несмотря на то что весят на 3 грамм больше 520-х. Хорошая токоотдача и повышенные объем с лихвой компенсируют дополнительный вес так что мотор его не замечает!
Для того чтоб они легко влезали в корзину для аккумулятора, придется подрезать 2 круглых выступа в начале корзины.
Ну и небольшое видео полета красной тушки
в полном БК
Продолжение следует
WLtoys V977 6-канальный вертолет сотого класса.
banggood.com/WLtoys-V977-Power-Star-X1-6CH-2_4G-Fl…
Вертолет для знакомства с миром 3D пилотажа.
Очень рекомендую начинать знакомство с 6 канальными вертолетами именно с данной модели. Для начала, это то что нужно. Данная модель отличается хорошей прочность, отличными полетными характеристиками и возможностями, в сочетании с не высокой ценой.
В этой записи я хочу рассказать о WLToys V977, о всех плюсах и минусах и о возможных вариантов доработки данной модели.
Хочу выразить отдельную благодарность Александру Кузнецову и его блогу mcheli.blogspot.com
Начнем с плюсов и минусов модели в стоковом состоянии.
Плюсы
- цена кита.
- БК мотор основного ротора.
- цена запчастей.
- наличие пирокомпенсации.
- очень устойчивый к авариям.
- хорошие летные характеристики.
Минусы
- не соосный стоковый пластиковый хаб, не позволяющий вертолету раскрыть все свои возможности, а начинающему пилоту получать удовольствие от обучения и полета.
- аппаратура управления в RTF комплекте не самого лучшего качества.
- использования протокола KN
- использование тяжелого и громоздкого регулятора, для основного двигателя.
- ломкий винт хвостового ротора.
Собственно, об устранении всех недостатков и улучшении полетных качеств данной модели пойдет речь дальше.
Аппаратура управления.
Как я писал выше для управления данная модель использует протокол KN.
Данную особенность я отнес к минусам, так как протокол не сильно распространен, а реализация каналов оставляет желать лучшего.
Моделью можно управлять и стоковой аппаратурой, но я рекомендую пойти по более сложному и дорогому пути - приобрести аппаратуру управления DEVO 10(7e, 8) , и модуль для впайки в аппаратуру NRF24L01 banggood.com/DEVO-Transmitter-Tuner-Modified-for-F…
Инструкции по впайке модуля и прошивки аппаратуры вы можете найти тут …blogspot.com/…/deviation-hisky-module.html
и тут …blogspot.com/…/deviation-v977-module-install.html… а так же на просторах интернета.
Используя для управления качественную аппаратуры с безграничными возможностями настроек позволит получать гораздо больше удовольствия как от обучения, так и от самого полета, а также позволит использовать симулятор для обучения.
Я остановил свой выбор на аппаратуре DEVO 10 (белого цвета) banggood.com/Walkera-Devention-DEVO-10-2_4GHz-10ch… и очень доволен этим выбором. В данную аппаратуру я впаял 2 модуля для поддержки различных протоколов, и теперь могу управлять всеми своими авиамоделями при помощи одной аппаратуры.
Улучшение стойкости к авариям
Хочу обратить особое внимание новичков на этот пункт.
Не нужно первым дело усиливать силовую часть и покупать мощные двигатели.
Если это ваш первый шестиканальный вертолет, и опыт управление у вас отсутствует, то первым делом, что вам нужно сделать - это учится полетам при помощи симулятора и по возможности повысить прочностные характеристики своего вертолета, и самое главное научится вовремя дергать холд.
Конечно симулятор симулятором, но реальные полеты гораздо интереснее, но и соответственно для новичков не проходят без падений.
Вот несколько модов которые призваны свести к минимуму повреждения при падениях.
Я крайне рекомендую сделать их первым делом.
Самое просто что вы можете сделать это установить скользящий верхний стопор.
Его можно сделать самому.
А можно купить данный набор из карбонового вала и стопора.
banggood.com/WLtoys-V966-V977-Upgrade-Parts-2_5mm-…
Следующий мод чуть сложнее, но позволит вам существенно повысить крашеустойчивость вашего вертолета.
После первого же согнутого основного вала я решил использовать только карброн. Всем он хорошо но слаб на кручение. Поэтому если при падениях не ломается шестерня то со временем разбивается на скручивание основной вал. Ставить шестерню или хаб на зубочистки или проволоки не получится при использовании карбонового вала, поэтому нужно было что-то решать.
После долгих раздумий я решил а почему бы не попробовать просто убрать шлиц с шестерни и все!
Убрал шлиц, сделал новый вал, проверил - РАБОТАЕТ!
Шестерня без шлица и просто плотно одевается на вал. При падениях проворачивается, сохраняя сам себя и вал! Конструкция многократно проверено полевыми испытаниями, в которых я много падал.
На шестерню желательно одеть бандаж из тонкой металлической трубки, да бы она не растягивалась, и не начала проскальзывать на валу.
Как плотно должна сидеть шестерня на валу? Достаточно чтобы вы могли взявшись за рот провернуть шестерню на валу не прилагая при этом огромных усилий, и не смогли бы повредить на кручения карбоновый вал.
Вал сделан со стопорным кольцом на нижнем конце. В валу проточена канавка , а в нее одето кольцо, которое сделано из витка пружины подходящего диаметра. Сверху это все прокапано цианакрилом, чтоб не болталось. Нагрузки на этот узел нет поэтому сильно мудрить с ним не стал.
Шлиц в шестерне срезан при помощи старого металлического вала.
Верхний конец вала был заточен под небольшим углом. Дальше круглым бором внутренняя кромка отверстия вала была сточена с одной стороны так чтобы по наружной кромки мы получили острие. Стачивать нужно только половину окружности внутренней кромки. и делать это со стороны сточенного угла.
На не заостренной половине окружности вала, должна остаться наружная фаска. Все это для того чтобы не заостренная часть вала первым входила в отверстие в шестерне и направляла вал, а затем заостренная кромка срезала шлиц. Можно аккуратно проворачивать вал. можно вбивать в шестерню, в общем задача удалить шлиц.
Вся эта конструкция в сочетании с не зафиксированным верхним стопорным кольцом выводит живучесть 977 в экстренных ситуациях, на новый уровень!
Хвостовой плавник.
Вы обязательно сломаете его самым первым) поэтому я рекомендую поставить плавник от v911, предварительно доработав его напильником под балку 2,5мм
Я к сожалению не смог найти плавник отдельно в продаже. Его можно купить в данных комплектах.
banggood.com/WLtoys-V911-RC-Helicopter-Accessories…
Либо просто плавник но другого цвета banggood.com/Wholesale-V911-4CH-Single-Blade-RC-He…
Плавник одевается на балку и при крашах просто проворачивается на ней либо слетает, не ломая ее.
Прошивка стокового регулятора BLheli.
Я рекомендую прошить стоковый регулятор прошивкой BLHeli, для того что бы использовать гувернер и понизить обороты двигателя.
Новичкам летать на низких оборотах будет гораздо приятнее и менее страшно.
Итак для прошивки я, подпаял разъем к стоковому регулятору.
Распиновку контактов можно посмотреть в документации к BLHeli github.com/…/BLHeli supported SiLabs ESCs.pdf на фотографии оригинального Plush 10A.
Прошиваем регулятор по инструкции из блога Александра Кузнецова, …blogspot.com/…/blheli-brushless-esc-firmware.html
Прошиваемся прошивкой версии 12.1 не старше.
Выбираем регулятор Turnigy Plush 10A
В случае если мотор завелся в обратную сторону меняем параметр Motor Direction.
Так же можно отметить плюсы прошивки BLheli
- Регулятор сигнализирует о бездействии, после заданного времени. Очень полезная штука если вы забыли отключить аккум от вертолета
- настраиваемый плавный старт.
- настраиваемая отсечка.
Подрежте канопу
Я рекомендую слегка подрезать канопу, дабы при авариях она не рвалась о лыжи и переднюю тягу, а так же для увеличения ее прочности проклеить ее скотчем, изнутри.
На новых версиях v977 канопа крепится на 4 точках. Это на самом деле только уменьшает прочность канопы и увеличивает шансы порвать ее при авариях.
Советую удалить 2 передних крепления канопы , а вместо этого в переднюю ее часть вклеить кусочек паролона, который будет упираться в раму и не давать канопе болтаться
Крепим сервоприводы
Сервоприводы в данной модели установлены в пазы в раме и сверху поджаты верхним держателем, который по совместительству выполняет роль направляющей ТАП.
Претензий к данному решению у меня нет, оно вполне надежно и хорошо реализовано, но его можно улучшить.
Я закрепил сервоприводы снизу на болтики от межлопастного вала. Сверху передний сервопривод так же закрепил на саморез предварительно доработав верхнее крепление.
Весь этот крепеж повышает жесткость всей конструкции и тем самым уменьшает шанс сломать раму нашего вертолета.
Все вышеперечисленные изменения помогут новичкам сохранить работоспособность вертолета гораздо большее количество времени и перенести без “летальных” последствий большое количество крашей. Но самое главное, что вы должны помнить - жизнь вашего вертолета в ваших руках. Не забывайте дергать холд вовремя и старайтесь учится летать над высокой травой.
Улучшение полетных характеристик
Это раздел я хотел бы разделить на 2 части.
“Улучшение полетных характеристик с минимальными затратами” и “Улучшение полетных характеристик для неограниченного бюджета”.
Начнем с первой, экономной части.
Улучшение полетных характеристик с минимальными затратами
Все моды рассмотренные выше были малозатратными, но высокоэффективными!
К сожалению глобально повышать летные качества вашего вертолета без серьезных затрат не получится, но кое что сделать можно и даже нужно.
Итак самое главное что вы должны понять - все улучшения, моды, мощные двигателя, БК хвост, все будет бесполезно если вы не приведете механику в порядок!
977 классный вертолет, но фбл у него слишком чувствительно к вибрациям. Повышенные вибрации будут сводить с ума ФБЛ. Хвост будет плавать, а вертолет, может заваливаться на бок.
Все проблемы с хвостом - это следствия повышенной вибрации и/или плохого контакта в разъеме питания. Поэтому вся работа по наладке механики с лихвой окупается на поле во время пролетов. Когда вы просто будете летать в удовольствие, а не ловить хвост и весь вертолет по всему полю.
На самом деле все просто. Внимание к мелочам и вертолет будет летать очень хорошо, даже на стоковых движках!!! Важна каждая мелочь и каждые десятки миллиметров!
Меняем хаб
Первым делом меняйте хаб! Пластиковый хаб не соосный и дает сильные вибрации.
Я перепробовал 5 пластиковых хабов и не нашел ни одного ровного.
Я рекомендую ставить полностью алюминиевую голову, включая хаб цапф и тарелку, но коль уж мы решили экономить то ограничимся хотя бы хабом.
Вариантов несколько.
banggood.com/XK-K110-Metal-Rotor-Head-Upgrade-Comp… самый гуманный по цене и качеству вариант.
www.xtreme-production.com/xtreme/index.php?main_pa…
www.heli-factor.com/shop/index.php?main_page=produ…
Либо этот набор banggood.com/WLtoys-V977-V966-Metal-Conversion-Upg…
Тут можно почитать боле подробно про него rcopen.com/blogs/198531/20404
При сборке головы, обратите особое внимание на симметричность размеров и веса всех составляющих частей ротора, находящихся по разные стороны основного вала.
Взвешивайте и балансируйте лопасти.
Перемеряйте и перевести цапфы - они должны быть одинаковыми.
Проверьте толщину демпферов, она должна быть одинаковая.
Проверьте конусные шайбы
Лопасти в цапфах не должны болтаться. Подтяните их так чтобы они совсем чуток поджаты, но при этом двигались достаточно свободно.
Устраните все возможные люфты.
Не забудьте выставить в “0” тарелку автомата перекоса.
Вибрации должны быть сведены к минимуму, и тогда полет будет максимально комфортным, и не будет никаких проблем с хвостом.
Хорошо настроенный вертолет должен висеть в помещении и никуда не улетать, хотя бы 5-10 секунд, так чтобы вы не трогали управление.
Если ваш вертолет висит без вашего вмешательства хотя бы 5 секунд то все у вас настроено правильно.
Слушайте ваш вертолет. Он должен приятно шелестеть лопастями, а не “орать” от вибраций.
Ставим лопасти от ХК К123 или WLtoys v931
Лопасти от ХК К123 и WLtoys v931 имеют большую длину и более узкие по сравнению с родными.
banggood.com/XK-K123-6CH-Brushless-AS350-Scale-RC-…
banggood.com/WLtoys-V931-RC-Helicopter-Parts-Main-…
Все это очень положительно сказывается на полетные качества. Увеличивается стабильность вертолета и подъемная сила ротора!
Новичкам я рекомендую лопасти от WLtoys v931 они чуть мягче. А для более высоких оборотов ротор можно взять лопасти от К123, они чуть жестче.
Это одна из не дорогих но очень эффективных модификаций.
Замена хвостового мотора и ротора
Я рекомендую в замен стокового мотора, когда он выйдет из строя, ставить вот такие моторы
banggood.com/SUT-Tail-Powerful-Motor-For-Tail-Blad…
Они такого же диаметра но длиннее стокового. Имеют большую мощность и самое главное, имеют вал диаметром 1мм
Такой двигатель способен дать 23-24 грамма тяги в отличии от стоковых 15-16г
В качестве хвостового пропеллера я использую хвостовой пропеллер от WLtoys v931 подрезанный до 42-45мм.
banggood.com/WLtoys-V931-RC-Helicopter-Parts-Tail-…
Передняя часть муфты сточена для красоты
Самое главное при замене хвостового мотора заменить проводку!
Я использую лакированный провод диаметром 0,4 - 0,5мм
Также нужно заменить часть провода в оплетке которая выходит из штекера , на более толстый но такой же мягкий, чтобы вибрации не передавались по нему на плату.
Очень рекомендую использовать алюминиевый держатель хвостового мотора.
banggood.com/Tail-Motor-Mount-for-WLtoys-v966-v977…
Он отлично отводит тепло, тем самым продлевая срок службы двигателя.
Замена разъема питания
Из за плохого контакта в разъеме питания могут возникнуть проблемы с нестабильностью хвоста.
Оригинальный разъем не отличается особой надежностью поэтому я рекомендую заменить его на JST.
banggood.com/Wholesale-10-Pairs-15cm-JST-Connector…
Это разъем имеет боле лучшее соединения и сведет к минимум потери.
Приведите в порядок проводку.
Удалите разъем от регулятора к мотору и подпаяйте провода к двигателю напрямую, максимально укоротив их.
Так же советую удалить термоусадку с родного регулятора, она достаточно тяжелая.
Уложите провода от сервоприводов между самих сервоприводов и аккуратно стяните их стяжкой или проволокой к раме.
Старайтесь чтобы провода были не натянуты и свободно выходили из разъемов.
Так же можно заменить провода питающие плату, на провода с большим сечением, так как питание хвостового двигателя идет непосредственно с платы управления.
На этом не дорогие модификации, улучшающие полетные характеристики, к сожалению заканчиваются.
Продолжение следует.
WLToys V911pro - 3D это реально.
Итак, мой WLToys V911pro подвергся очередным изменениям, который вывели его на новый до селе не ведомый ему уровень полетов)
Конечно 3D - это громко сказано, он так и остался 4-канальным вертолетом с фиксированным шагом, но теперь он может выполнять некоторые фигуры высшего пилотажа, такие как флипы, роллы,
конечно же растянутые по высоте, и при желание можно выполнить мертвую петлю.
А теперь обо все по порядку.
Как можно видеть по фото, это уже совсем не тот v911 который когда-то приехал ко мне из Китая.)
По мимо всех пред идущих изменений о которых я рассказывал в прошлой части rcopen.com/blogs/198531/19369, в этой версии 911 заменены основные лопасти. Диаметр ротора теперь составляет 226мм!!! Стоковой ротор в диаметре 190мм.
Это существенно изменило поведение вертолета. Мощности теперь очень много. Весь полет проходит в первой половине хода стика газа, только под конец уже приходится двигать стиком во второй половине. Вертолет с увеличенным ротором стал более вальяжным, но при этом не потерял свое шустроты. Теперь вертолет требует чуть больше пространства для полетов и в маленькой комнате летать уже не так удобно. Лопасти тяжелее стоковых но подъёмная сила создаваемая ими с лихвой компенсирует этот факт. Время полета особо не изменилось. если летать спокойно, то на 200мАч аккумуляторе можно пролетать 7.5-8 минут. Полет по квартире по таймеру пульта у меня показывает ровно 8 минут полета,
Лопасти были взяты от неизвестного китайского соосника, в ближайшей мастерской по ремонту радиоуправляемых игрушек. Они были существенно больше, поэтому мне пришлось их уменьшить и сделать уже.
Переработан механизм крепления лопастей. Теперь они крепятся к хабу через цапфы, которые позволяют им свободно двигаться. Этот факт существенно продлевает срок службы всего вертолета, так как при крашах лопасти сгибаются в цапфах, частично гася энергию от удара. и не передают эту энергию всему вертолету. Цапфы так же были взяты от того же неизвестного соосника.
Хаб заменен на алюминиевый, из этого комплекта banggood.com/WLToys-V911-Nine-Eagles-260A-320A-4CH… с некоторыми доработками, а именно облегчением и заменой латунных направляющих для линков, на карбоновые. Так же крепежное отверстие было перемещено на другой бок.
Изменен флайбар. Его я сделал из карбонового прутка диаметром 1м. Грузики взял от оригинального флайбара, просверлив в них отверстия и вклеив их на концы карбонового прутка. Центральная часть флайбара так же была взята от оригинального, и так же на ее торцах были просверлены отверстия в которые вклеенные концы карбоновых прутиков. Флайбар получился легким - 1.4г. Флайбар получился очень прочным.
Так как флайбар стал более жестким и легким чем родной, я укоротил основной вал, опустив весь ротор ниже. Флайбар по канопе не бьёт.
Еще пара мелких изменений.
Заменены провода к хвостовому двигателю на боле толстые. Двигатель был разобран и провода подпаяны непосредственно к щеткам.
Облегчена основная шестерня. “Рыбий глаз” в тарелке заменен на капроновый.
Но самые глобальные перемены которые не заметны - это аппаратура управления.
С недавних пор я стал обладателем отличной аппаратуры DEVO 10. banggood.com/Walkera-Devention-DEVO-10-2_4GHz-10ch…
Данная аппаратура позволяет управлять большим количеством моделей если подвергнуть ее некоторым модификациям, таким как впайка соответствующего модуля A7105 banggood.com/A7105-Wireless-RF-2_4GHz-Transceiver-… с последующей перепрошивкой самой аппаратуры, для использования этого модуля. deviationtx.com/downloads-new
DEVO 10 позволяет создать конфигурацию модели на любой вкус.
Я соответственно воспользовался всеми ее преимуществами, и сделал конфигурацию для модели v911, в которой расширил ход сервоприводов, что значительно увеличило маневренность вертолета, а также поднял кривую в канале рудера на 125% что существенно увеличило скорость хвоста.
Все эти изменения позволяют вывести полет на v911 на новый уровень и выполнять некоторые фигуры высшего пилотажа.
Полетный вес вертолета с аккумуляторами на 200мАч составляет 35.2г, без аккумулятора 29.1г
Вот небольшое видео полета. За качество видео не ругайте, такого шустрого малька снимать очень тяжело
Небольшое обновление
Уже довольно давно я в очередной раз изменил совой v911, но все никак не мог выделить времени рассказать об этом.
На этот раз я заменил хаб и цапфы лопастей.
Как можно увидеть на фото, это уже не части какого либо другого вертолета.
Этот хаб и цапфы я спроектировал сам, и распечатал их на 3D принтере, по технологии SLS из материала РА12.
Хаб сделал по подобию оригинального хаба от 911, ну а цапфы придумал на свой вкус.
Материал РА12 отлично подошел для этих целей, и детали получились довольно прочные и очень легкими.
Вес хаба и цапф составил 0.6г!
Тут можно найти два файла для печати:
yadi.sk/d/5jxgiWE64jQlrQ
yadi.sk/d/7wtN4J-MAp6m_w
В качестве межлопастного вала, который соединяет хаб и цапфы, я использовал карбоновый прутик диаметром 1.2 мм
Он легкий и отлично подходит для этой задачи.
После данного обновления вертолет стал очень стабильный! Теперь он можно взлететь и не трогать пуль управления около минуты, вертоелет будет висеть на месте. Дальше придется подгазовывать, но правый стик управления можно не трогать.
В таком виде вертолет стал весить 28.4г
Итак, отчет о металлическом апгрейде.
Так как от бенггуда я таки не получил желаемого комплекта www.banggood.com/ru/WLtoys-V9...-p-943625.html, а точнее ДВА РАЗА получил не тот комплект www.banggood.com/ru/WLtoys-V9...-p-956399.html
качество которого оказалось очень печальное, я вернул деньги сделал заказ на ебее. www.ebay.com/itm/400778952037...%3AMEBIDX%3AIT
Сегодня получил комплект и начал сравнивать, все оказалось еще печальнее чем я думал!
Первое фото, общий план. Уже на нем видно что с направляющей тарелки, у комплекта с бенггуда, беда страшная)
Общее качество обработки очень отличается понятно в какую сторону. Весь комплект с бенга толще на пять соток, практически по всем габаритам, а также в некоторых местах чуть другого профиля, это буде видно на следующих фото. Бронзовые шарики на комплекте от бенггуда выполнены очень не качественно.
Анодирование чуть отличается по цвету. Комплект от бенггуда ярче.
Второе и третье фото - хаб
Хаб от бенггуда справа
Отверстие под демпферы смещено вниз.
Направляющие линков отфрезерованны со смещением в сторону.
Отверстие под основной вал больше чем нужно на одном комплекте,хаб болтается на валу, а на втором меньше чем нужно, на оригинальный вал хаб не садится.
Четвертое и пятое фото - цапфы.
Цафа от бенггуда справа
Качество обработки и толщина рычага отличаются.
Смещено отверстие под подшипники!! Это приведет к неизбежной бабочке и вибрациям.
Причем это смещение только на одной цапфе из комплекта!
В цапфах от бенггуда подшипники заклинивают. Я думаю что это из-за их слишком плотной посадки в корпус цапфы. В комплекте с ебея с подшипниками все отлично!!!
Шестое и седьмое фото - тарелка.
Разный профиль корпуса и качество подгонки шариков к корпусу.
Кривая направляющая тарелки. Причем криво просверлено именно отверстие в корпусе.
Покрутил еще немного пару корявых комплектов которые прислал бенггуд, обнаружил еще немного бед.
В одном комплекте внутренняя часть тарелки не была завальцована. я взялся за одну часть тарелки одной рукой, за другую часть тарелки другой, и без особых трудностей просто разобрал тарелку на 2 части!
Причем внутренняя часть обрезана заподлицо под подшипник, так что нет юбки которую можно завальцевать.
Вторая тарелка также оказалась не без греха. Повертев ее в руках я так же смог разъединить обе половины, хотя в этой внутренняя часть была завальцована. Но это не помешала вылезти ей вместе с подшипником из внешней части, в которую этот самый подшипник был просто вклеен на непонятный клей,так как без клея он там просто болтался!
Также покрутив подшипник я обнаружил что он такой же китайский как и весь этот комплект. Внутренняя оправа болтается и довольно сильно.
В общем говорить о какой то точности до пусках и посадках смысла нет вообще!!!
По поводу пластиковой части тарелки в комплекте с ебея не стоит расстраиваться!
При желании ее можно заменить на пластиковый верх с рыбьим глазом, от этой тарелки www.banggood.com/ru/WLtoys-V9...-p-924545.html с последующим обязательным допиливанием.
А я взял металлически верх от бенггудовского комплекта, привел его в порядок, убрал все лишнее, заменил рыбий глаз на капроновый, и поставл его в нормальный корпус от комплекта с ебея.
Если кто будет переделывать так же, то нужно утопить верхнюю часть чуть глубже в подшипник, чем она есть.
Для этого придется снять немного металла, по наружной стенки в которую упирается подшипник. Я одел эту часть на большой бор, бор вставил в бормашину и сточил надфилем кромку где-то 0.7-0.8мм, чтобы внутренняя часть села глубже в подшипник.
Все это нужно для того чтобы позволить отклонятся тарелки на больший угол и не цеплять внутренней стороной верхней части тарелки основной вал. Я не знаю как там со стоковым пультом, но с Дево при 100% расходах по элеватору и элеронам, тарелка, даже родная цепляет основной вал…
Если вал металлический, а тарелка пластик, то вы скорее всего этого и не узнаете, если только специально не посмотрите. А если вал карбоновый а тарелка алюминиевая, то внутренняя часть тарелки которая вставляется в подшипник, при крайних положениях стиков и с 100% росходами, будет съедать карбоновый вал.
Поэтому и нужно опустит внутреннюю часть глубже в подшипник, чтобы увеличить безопасный угол отклонения тарелки.
Вердикт как вы понимаете однозначный!
Брать комплект от бенггуда категорически не стоит!
Про аппаратуру
Аппаратура управления, которую нам предлагает производитель, довольно неплохого качества, а если учесть ее цену в комплекте с вертолетом, то она просто великолепна)
Но, как и полагается, есть у нее недочеты, который легко поправить.
Две верхних кнопки на торце пульта выполнены на обычных микро кнопках. И если левая кнопка которая отвечает за различные функции мыльных пузырей и фото съемки, как раз подходит для выполнения возложенных на нее функций, то вот правая кнопка которая отвечает за повышенные расходы, должна зажиматься и удерживаться пальцем, для того чтобы эти самые повышенные расходы работали.
Понятно, что зажимать и удерживать какую-либо кнопку и при этом еще и управлять стиками не очень удобно.
Поэтому я заменил родную правую кнопку на кнопочный переключатель с фиксацией положения. Удерживать клавишу теперь нет необходимости что очень удобно. При этом внешний вид аппаратуры остался таким же, как и прежде, так как я использовал родную блестящую клавишу, одев ее на переключатель.
ixbt.photo/photo/347028/…/1032174.jpg (7.1 MB) ixbt.photo/photo/347028/…/1032175.jpg (4.0 MB)
Второе что я очень рекомендую сделать с аппаратурой - сделать настоящую антенну.
Антенна в в нашем пульте фейковая, просто кусок пластика, а сигнал передается куском экранированного многожильного провода, который находится в корпусе. Конец провода очищенный от экрана на 31,25мм и является передающей антенной.
Дальность действия такой не хитрой антенны по моим измерениям составляет порядка 200м. Этого расстояния хватает с огромный запасом для полетов, НО!!! это все в работает в нормальных условиях без особых сторонних помех.
Долгое время меня этот вопрос не волновал, пока я не начал летать на школьном поле возле которого проходит высоковольтная ЛЭП. И тут начались потери связи на расстоянии боле 50-60м что не очень приятно. При этом на этом же поле дальность работы пульта составила порядка 200 м по земле. А в воздухе дела обстояли гораздо хуже. Поэтому я решил поставить на пульт полноценную антенну.
Для этого на ближайшем радио-рынке была куплена антенна для вайфай роутера на 2дБ, и SMA разъем , для установки антенны.
Часть родного крепления фейковой антенны я отрезал, предварительно разобрав его. В это крепления я вставил SMA разъема, прикрутив его гайкой сверху и предварительно подпаяв к нему провод от передающего модуля. Центральную жилу к центральному контакту, а экранирующую оплетку разделил на два чести и подпаял к корпусу разъема.
Результат категорический положительный. Потери связи на проблемном поле прекратились. На сколько увеличилась дальность приёма я пока не проверял, но теперь при желании и необходимости дальность можно значительно увеличить поставив другую антенну на 4-5дБ.
ixbt.photo/photo/347028/…/1044892.jpg (8.7 MB) ixbt.photo/photo/347028/…/1044891.jpg (8.7 MB)
ixbt.photo/photo/347028/…/1044890.jpg (7.6 MB)
Ну третье что я сделал - убрал трещотку со стиков.
Стики на нашем пульте с трещоткой, и меня она особо не раздражала, пока я не взял в руки хороший пульт и не подергал стики на нем. Они был без трещетки, и понятно что совсем другого качества.
Ход стиков без всяких трещеток мне очень понравился и я решил сделать тоже самое на нашем пульте.
Я просто спилил надфилем зубчатую насечку на подпружиненной части корпуса стика. На фото ниже видна часть стика которая подверглась обработке.
ixbt.photo/photo/347028/…/1044894.jpg (8.1 MB)
Результат мне очень нравится и я рекомендую всем сделать тоже самое
Так же хочу описать процедуру калибровки аппаратуры, который был совершенно случайно обнаружен форумчанином tu4kin при активной поддержке всей ветки о 912 и самого отважного форумчанина Phantom_NGK. Возможно это кому-то пригодится.
1 - Ставим стики по центру. (не обязательно)
2 - Зажимаем триммер рудера влево и включаем аппаратуру. Загораются все индикаторы на экране.
3 - Двигаем стики в самые крайние положения, сначала один стик, вверх-вниз в право-влево, потом второй.
4 - 1 раз нажимаем триммер рудера в лево
Калибровка закончена.
Про оформление
Оформление нашего вертолета как по мне не самое лучшее и не блещет особым стилем и красотой.
Решил я немного перекрасить канопу да постирать все лишние надписи с вертолета, дабы вертолет смотрелся чище и серьезнее. И вот что из этого вышло.
Также немного изменил вертикальный стабилизатор, и способ его крепления к хвостовой балке.
После того как винт, который крепит горизонтальный стабилизатор, снизу, к балке, расколол мне карбоновую балку, после очередного падения, я от него оказался.
Вместо него подложил под пластиковый хомут резиновую прокладку и затянул хомутик двумя верхними шурупами.
Держится отлично.
Ну а в конце концов мой 912 превратился в бесфлайбарный вертолет.
Итак, канопа, рама, сервопривода и двигателя от 912. На основном двигателе пиньон на 11 зубов.
Плата управления от FX071C.
Хвост от Walkera Master CP. Балка хвостовая из карбоновой трубки 8*6.
Тарелка от Heli-factor для V912. Спилены длинные рога, Рыбий глаз переделан под 4мм вал.
Основной вал 4мм карбоновый пруток. Подшипники на основном валу 4*8*3.
Голова и лопасти от Blade 200 SR X. С алюминиевых деталей снято анодирование.
Лыжи от FX071C, вместо полозьев паста от шариковой ручки, в черной термоусадке.
Очень рекомендую всем избавляться от флайбара, вы получите совершенно другой вертолете, и другой в гораздо лучшую сторону!
Продолжение следует.
WLToys V911pro 4-рех канальный флайбарный микровертолет 80 размера.
banggood.com/WLtoys-V911-V2-V911-pro-2_4G-4CH-RC-H…
Вертолет для новичков, его можно смело отнести больше в раздел игрушек, чем в раздел серьезных аппаратов.
Очень рекомендую начинать знакомство с темой вертолетов именно с микровертолётов. Для начально знакомства, это то что нужно. Во первых, дешево, а во вторых микровертолеты довольно легкие и при крашах, а они обязательно будут, меньше ломаются.
Существуют две версии, 911 и 911pro(v2). 911pro на мой взгляд имеет чуть меньше недостатков чем обычный 911, поэтому о 911pro и пойдет речь.
Достоинства:
- не дорогой
- отлично борется с ветром и летает на улице (в отличии от своего старшего брат 912)
- очень маневренный и резвый.
- очень крепкий и краше устойчивый.
- запчасти очень дешевые и в наличии во многих местах.
- летит из коробки.
Недостатки:
- требует балансировки доработки флайбара и ротора, для того чтобы получить стабильный полет и продлить срок службы.
- флайбар при резких маневрах бьет по канопе.
- хвост дрейфует по мере разрядки аккумулятора.
- коллекторных двигателей хватает на порядка 100 полетов.
- Стоковый пульт не отличается особым качеством.
В этой записи я хочу рассказать о WLToys V911pro, о всех его достоинствах и о том, как устранить его недостатки.
А также покажу мою версию 911. Пока что это версия, которую я старался оставить максимально похожей на оригинал. В планах сделать еще несколько вариантов.


На первый взгляд, это все тот же 911, однако это далеко не так, и об этом подробнее ниже.
На самом деле вертолет довольно серьезно переработан.
- изменена конструкция держателя аккумулятора.
- изменен флайбар.
- добавлен Step-Up преобразователь
- изменена канопа.
- переделан хаб.
- заменены рычаги микшера.
- изменен основной вал.
- заменен ТАП и его направляющая.
- добавлен передний светодиод.
Теперь обо всем поподробнее с картинками.
Первая проблема - это механическая часть вертолета
Она требует доработки и балансировки.
Начать стоит с балансировки флайбара.
Балансировку флайбара можно проверять одев его на тонкую иглу, но окончательную балансировку нужно проводить одев его на основной вал и включить двигатель. Все остальное с вала нужно снять. Хорошо отбалансированный флайбар не должен давать вибраций.
Я перепробовал различные варианты флайбаров, и пришел к выводу, что самый оптимальный для меня вариант - это укороченный на 15-16мм стандартный флайбар. Верхний на фото. По весу он выходит 2.05г.Так как он стал короче, это дает нам большую отзывчивость и маневренность. В случае, когда мы сильно зарулились, и флайбар начинает тянуть вертолет в бок его становится легче выправить, а соответственного избежать краша. Также он перестал бить по канопе во время маневров.
Я укоротил стандартный флайбар, отрезав грузики в месте где они переходят в ось флайбара. Дальше на краях оси я нарезал резьбу М2. В грузиках просверлил отверстия до металлических вставок и также нарезал резьбу. Дальше осталось просто накрутить грузики на ось и флайбар готов.

Ниже идет флайбар с лопатками. Это новый флайбар от WLtoys.
banggood.com/WLtoys-V911-RC-Helicopter-Accessories…
Он в также неплохо себя повел. По весу он всего на 0,2г тяжелее стандартного, при этом он короче и не бьет по канопе в отличии от стандартного.
Вертолет с ним стал немного инерционнее, однако загнать вертолёт в сваливание значительно сложнее, и это плюс данного флайбара.
Третий с верху - стандартный флайбар, весом 2.1г. Все в нем не плохо, однако при маневрах он бьёт по канопе.
И самый нижний - это флайбар от BenMa Helios 100 Это самый короткий и самый тяжелый из всех флайбаров. весит он 3г!!!.
Я крайне не рекомендую его использовать, по многим причинам. Во первых, он тяжелее стандартного в половину. Из-за этого вертолет становится очень инерционным, и управлять им приходится с большим запасам. То есть если до стены пол метра, а вы приближаетесь к ней с большой скоростью, то сделать разворот вам уже не удастся, так как даже после разворота вы продолжите движения в прежнем направлении.
Во вторых, любые маневры с данным флайбаром сопровождаются раскачкой вертолета как маятник. Это очень раздражает в полете.
В третьих поднимать лишний грамм не очень хорошо для основного двигателя.
Дальше переделываем хаб и крепление лопастей в нем.
Стандартный хаб сделан довольно плохо и не отбалансирован.
Полувалы, на которые одеваются лопасти разного диаметра и лопасти на них болтаются.
Поэтому я решил удалить их и сделать хаб с межлопастным валом.
В качестве вала я использовал металлический стержень диаметром в 1,5мм
Вал вставляется в хаб через демпфер. Для этого в хабе было просверлено отверстие диаметром 2.3мм.
Демпфер сделан из оплетки многожильного провода. Меняя жесткость демпфера можно добиться разного поведения вертолета. Если поставить мягкий демпфер, который будет позволять лопастям отклонятся на большой угол, мы получим довольно мягкий полет вертолета, с плавным реагированием на движение стиков управления. И соответственно наоборот, жестко закрепив межлопастной вал мы получим более резкий в управлении вертолет.
Так как межлопастной вал у нас 1.5мм, а отверстия в цапфах лопастей гораздо больше (2,5мм) Я вставил в отверстия капроновые втулки с внутренним диаметром 1.5мм.
После всего выше переделанного мы устраним болтанку лопастей, что очень положительно скажется на работу вертолета.

Следующее что я сделал - это установил рычаги микшера от Nine Eagles Solo Pro 270
Они имеют больший коэффициент передачи, и выполнены на латунных втулках, что исключает возникновение люфтов в месте их крепления к лопастям.
Рычаги сделаны очень качественно и идеально подходят под тяги 911. Единственное что для их установки придется обрезать с лопастей старые крепления и просверлить крепежные отверстия. С этими рычагами вертолет способен войти в иверт, при включении двойных расходов и полному веперед по элеватору!

Установка ТАП с “рыбьим глазом”
Тарелка из этого набора.
banggood.com/WLtoys-V911-pro-RC-Helicopter-Accesso…
Смотри фото выше.
Данная тарелка позволит повысить точность управления вертолётом, а также минимизирует люфты.
Качество изготовления не особо впечатлило.
На этом доводка механической части практически завершена. Осталось только добавить резиновые уплотнители на концы рычагов АТП, и в местах крепления тяг с сервоприводами, для устранения лишних люфтов.

Следующий шаг который я сделал - это добавил Step-Up преобразователь
Проблема с дрейфующим хвостом в данной модели связана с отсутствием Step-Up преобразователя цепи питания. Из-за чего в начале полета хвост уводит в одну сторону, а по мере разрядки аккумулятора в другую.
Поэтому решено было эту проблему устранить путем впайки нужных деталей.
Подробная инструкция и описание находится по ссылке.
rcopen.com/blogs/122562/16776
Автору огромное спасибо.
 .
.
Как видно на фото выше, по мимо впайки Step-Up преобразователя, я также немного обточил надфилем плату придав ей округлую форму. Этим я убрал острые края которые царапали канопу изнутри и избавился немного от лишнего веса.
Немного о балансе.
Данный вертолет проектировался под аккумуляторы на 120мАч.
С ними центр тяжести вертолета как раз проходит вдоль основного вала.
Однако время полета с такими аккумуляторами составляет мене 5 минут.
Поэтому все смело пользуют аккумуляторы на 200мАч, и радуются 8-ми минутными полетами.
И все было бы не плохо, однако радость омрачает тот факт, что, аккумуляторы на 200мАч тяжелее, и поэтому центр тяжести вертолета смещается назад. Это отрицательно сказывается на летные характеристики.
Поэтому, не долго думая, я решил перенести держатель батареи вперед и вверх.


От родной рамы был аккуратно отрезан держатель батареи. Отрезан так, чтобы усики, которыми он крепится по бокам к раме были длине чем они есть. Для этого усики отрезаются не в месте их перехода в держатель, а дальше, с частью самого держателя. Эти длинные усики нам потом очень пригодятся.
Из старой поломанной рамы от 912 был вырезан подрамник, к которому был прикреплен держатель батареи, на пару пластиковых штифтов. Дальше это все было подклеено к шасси, в задней части на штифты, которые я оставил не полностью обрезав прежний подрамник, а спереди просто подклеиваем держатель к самому шасси, и сверли в нем крепежное отверстие. По бокам держателя были просверлены отверстия, и стойки шасси, штифтами, которые мы вырезали в самом начале, были прикреплены к держателю батареи. Конструкция получилась довольно жесткой, и уже проверена на краше устойчивость. По весу новые шасси не отличаются от стандартных.





Баланс с 200 аккумуляторами стал идеальным. Вертолет летает вперед так же хорошо, как и назад.
Центр тяжести сместил вверх и вперед. В общем вертолет стал выглядеть и летать намного поприятнее.
Про липосакцию
Вертолет довольно простой и на самом деле сделать его легче реально проблемно.
Самое первое что бросается в глаза - это металлический основной вал.
Его можно и нужно заменить на карбоновый. Это минус 1.3г лишнего веса.
Вал лучше делать из цельного карбонового прутка. Можно и из трубки, но тогда желательно укрепить трубку, вклеив в нее пластиковые штырьки, в местах сверления отверстий.
Вал я сделал длинее на 2 мм, для того чтобы наверняка устранить удары флайбара о канопу. В связи с этим пришлось переделать направляющую АТП, так как вся голова поднялась вверх на 2мм и стоковой направляющей не хватало по длине, для нормальной работы тарелки.
Вместо упорного кольца с винтом, я приклеил на вал обычное пластиковое колечко, которое так же чуть тоньше, и без всяких шурупчиков.


Про канопу и освещение.
Стандартная канопа от 911pro довольно хорошая. Самое приятное это то, что рисунок нанесен на внутреннюю поверхность канопы и не царапается при крашах.
Она легкая, но при этом хрупковата, и может лопнуть от сильных деформаций.
Также канопа очень длинная, и это никак не связано с конструктивной необходимостью, к примеру, как на 912.
Большая канопа - это лишнее препятствие на пути воздушного потока основного ротора. Это легко проверить сняв ее и попробовав полететь. Поэтому я рекомендую уменьшить её.
Я перенес крепежные отверстия канопы на 6мм, обрезал лишнее по контурам, так чтобы канопа осталось прежней формы.
911 не имеет ни каких световых маяков на борту, и летать в сумерках на нем становится проблемно, так как не видна ориентация вертолета.
Поэтому я решил устранить этот недостаток и установить впереди небольшой диод.
Диод был взят от подсветки клавиш мобильного телефона, и через резистор на 69 Ом подключен к бортовому питанию.
Для этого я сделал гнездо на крышке держателя аккумулятора, а в качестве штекера использовал маленький штекер на 2 ножки от двигателя Nine Eagle Solo PRO.
Резистор был взят также с платы мобильного телефона, и он в три раза меньше диода. Диод очень маленький, поэтому после того как я все спаял, я вклеил его в специально сделанный корпус, и уже сам корпус приклеил в отверстие, просверленное в канопе.


Теперь вертолет отлично летает по ночам, и проблем с ориентацией не возникает.
Про аккумуляторы.
Есть небольшая проблемка с аккумуляторами которую нужно врем от времени устранять. Это разъем. Он со времен разбивается в следствии чего ухудшается контакт, и соответственно питание вертолета также начинает ухудшаться, что приводит к вялой работе двигателя и нагреву самого разъема питания. Поэтому советую проверять разъем на нагрев и поджимать сами контакты в разъеме аккумулятора тонким пинцетом, по мере надобности. Это вернет вашему вертолету бодрость духа, а вам хорошее настроение!
Продолжение следует.
Третья серьезная проблема этого вертолета - это флайбар.
Он бьёт по канопе, он бьёт по хвостовой балке при крашах, он не отбалансирован, и это все не очень приятно.
Я долго экспериментировал с разными флайбарами, облегчал грузики, ставил вместо грузиков лопатки, и пришел к выводу что самый оптимальный вариант - это просто укоротить общую длину флайбара на 3см, оставив родные грузики.
Сделать это можно следующими способами:
Нагреть грузики на газу, и снять их. Рассверлить в них отверстия, просверлит сбоку отверстия под гужоны, нарезать в них резьбу, сделать (или купить) гужоны и закрепить обратно грузики на флайбаре.
Либо зажать флайбар в тисках, нагреть горелкой грузики и попытаться их набить дальше по оси флайбара. Второй вариант пока не пробовал, но думаю все должно получится.
Это даст нам большую отзывчивость и маневренность. В случае, когда мы сильно зарулились, и флайбар начинает тянуть вертолет в бок его становится легче выправить, а соответственного избежать краша. И самое главное - укороченный флайбар не достает до хвостовой балки и даже в случае краша она останется невредимой. Канопа только при очень резких маневрах может пострадать, но это нужно реально сильно постараться.
Балансировку флайбара можно проверять одев его на тонкую иглу, но окончательную балансировку нужно проводить одев его на основной вал и включить двигатель. Все остальное с вала нужно снять. Хорошо отбалансированный флайбар не должен давать вибраций.
На фото укороченный флайбар, грузики немного сточены и зажаты гужонами.

Устраняем дисбаланс и приводим в порядок механику.
И так, основная масса проблем с вертолетом случается из-за некачественно сделанного хаба (втулки вала), а также в следствии его повреждений как показано на следующем фото, и не отбалансированного флайбара.
О балансировке флайбара я выше, поэтому дальше речь пойдет о остальной механике.
После очередного убитого хаба, я решил, что нужно что-то с этим делать.

Конструкция на межлопастных полувалах как по мне очень неудачная.
Я решил исправить это путем установки в хаб цельного межлопастного вала через демпфер. Это на мой взгляд существенно улучшит ситуацию с долговечностью самого хаба, в следствии более распределенной нагрузки. А так же использование демпфера, немного уменьшит вибрационную составляющую.
Самое первое это проверка хаба на соосность.
Как и положено при литье получить симметрию очень тяжко, поэтому пришлось немного подпилить край одной стороны отверстия под межлопастной вал, чтобы в последствии цапфы сидели на хабе симметрично по их длине относительно хаба.
Дальше в хабе и в самом валу, он у меня карбоновый, было просверлено отверстие диаметром 3мм.
Затем в качестве вала был выбран металлический стерженек диаметром 2мм.
Межлопастной вал вставляется в хаб через демпфер, в роли которого выступает кусочек мягкой оплетки от многожильного провода.
Демпфер у меня получился не таким мягким как хотелось бы, но тем не менее отлично выполняет свои функции. Сделать его больше и соответственно мягче не позволяет конструкция самого хаба. Сверлить отверстие в нем диаметром более 3 мм не стоит, так как это скажется на его прочности.


Так как отверстия в цапфах под межлопастные полувалы у нас 2.6мм, а новый вал 2мм, решено было вставить в цапфы капроновые втулки.
Втулки были сделаны довольно быстро. Основа втулок часть от гелевой пасты, которая находится между самим стержнем и наконечником. Эти части были расточены до нужных размером и обрезаны по длине.

Следующее это крепеж лопастей в цапфах. Он так же был сделан через тонкие капроновые втулки, которые также были сделаны из стержня от толстой пасты. Отверстия в лопастях были немного увеличены.


После сборки и проверки, стабильность вертолёта приятно порадовала. Разбаланс винта отсутствует, и как следствие отсутствуют вибрации.
Очень рекомендую привести в порядок механику вертолета, и он будет вас радовать гораздо дольше.
Следующий недостаток — это плохое охлаждение главного двигателя.
Решить это проблему очень просто и дешево.
Не тратьте деньги и время на покупку и установку дополнительных радиаторов на основной двигатель. Конструкция рамы, которая охватывает двигатель, является сама по себе отличным радиатором. Осталось только ее соединить с самим двигателем.
Сделать это можно по средствам термопасты, которую можно купить в магазине радиотоваров.
Послабьте крепление рамы рамы, извлеките двигатель. Намажте на раму термопасту в месте ее контакта с двигателем и скрутите все болты.
Излишки пасты придется долго и мучительно вытирать), но это уже мелочи.
Очередной мод который я советую сделать - это переместить плату.
Плата в вертолете крепится на двух болтиках. Вынесена она достаточно высоко и далеко в перед. И при крашах я дважды рвал канопу изнутри о край платы. Это не хорошо ни для самой платы, не для канопы.
Поэтому очень рекомендую скруглить надфилем края платы и переместить плату глубже и ниже в корпус вертолета.
Для этого обрезаем в половину пластиковые штырьки к которым прикручиваются крепежные шурупы, за ними прокалываем шилом новые небольшие отверстия. Обрезки, которые остались можно использовать в качестве подложек, и накрутить их на шурупы, а после прикрутить саму плату в новые отверстия.
Этим мы отодвинем плату дальше от канопы, и минимизируем возможность повреждения канопы и самой платы.
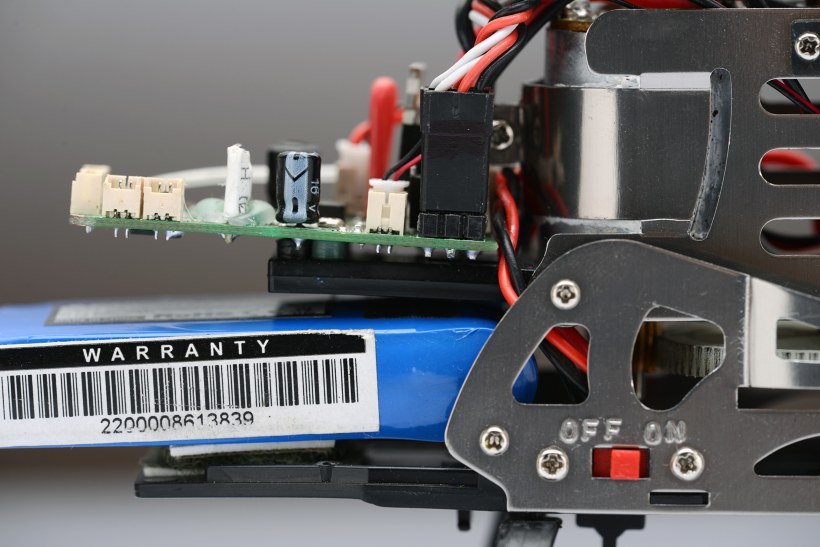
Устранение серьезных недостатков данной модели на этом в принципе заканчивается. Дальше хотелось бы описать несколько полезных модификаций, которые позволять вам сэкономит время и деньги, а также улучшать летные характеристики вертолета.
Про лыжи
Если это ваш первый вертолет, то первое, что вы скорее всего сломаете, в течение первых двух недель - будут лыжи. (простите за каламбур)
Они сделаны довольно неплохо, но у всего есть свой предел прочности. И даже если вы купите новые, вам их опять хватит еще на пару недель.
Помимо того, что вы обязательно сломаете лыжи, в месте с лыжами вы обязательно выламаете куски рамы, к которой эти лыжи прикручены шурупами.
Так как покупать новые лыжи и нижнюю раму желания особо не возникает, я решил посадить лыжи на капроновые штырьки, которые вкрутил в отверстия для шурупов. Штырьки мягкие и легко гнутся, лыжи просто плотно одеваются на них и держатся довольно хорошо, но при падении легко отлетаю не ломаясь и не выламывая части рамы. И выглядит нормально, и практично, особенно для начинающих горе пилотов.
В таком виде лыжи живут у меня уже 5 месяце, пережили очень много падений, и ломаться не собираются.
Лыжи можно привязать ниткой к корпусу, чтобы вовремя краша они не улетали далеко, и вы потом не занимались ихними поисками.


Про липосакцию
Самое простое и не дорогое, что вы можете сделать чтобы убрать лишний вес, и тем самым увеличить время полета, а также отзывчивость - это заменить металлические детали вертолета на карбоновые и пластиковые.
И так я заменил на карбон:
хвостовую балку, опоры хвостовой балки, главный вал.
Заменил металлические полозья лыж на пасты от гелевых ручек.
Результат очень положительный, вертолет взлетает на 20% мощности (одна палка на пульте)
Родные детали весили ровно 31гр, новые детали весят 11.3гр.
Хвостовую балку сделал из карбоновой трубки 8мм*6мм, длинной 21см, длине родной на 1.5 см.
Опоры хвостовой балки (подкосы) по длине не менял и сделал их из карбоновой трубки 3мм*2мм
Дольше всего возился с главным валом. Все отверстия под болты были тщательно укреплены.
В просверленные отверстия вклеил заранее подготовленные маленькие металлически трубочки. Все лишнее спилил надфилем, и зашкурил. В общем все болты теперь проходят внутри этих металлических трубочек и не разбивают сам вал. Отверстие, под крепеж втулки, которая удерживает верхний подшипник, сквозным не делал.
Вал лучше делать из цельного карбонового прутка. Можно и из трубки, но тогда желательно укрепить трубку, вклеив в нее пластиковые штырьки, в местах сверления отверстий.
Основную шестерню советую посадить на вал в перевернутом виде, крепежным болтом вверх. Это отодвинет крепежный болт дальше от края вала что уменьшит вероятность расщепления вала, в месте крепления болта. А если одеть на кончик вала металлическое кольцо, то расщепить его будет очень трудно.
Также немного пильнул раму, сделав пару лишних отверстий в нижней части на против основной шестерни, и немного увеличил соседнее отверстия.



При желании, вертолет можно сделать еще легче. Думаю, что убрав подкосы, и горизонтальный стабилизатор, и еще порезав раму, можно легко убрать грамм 10, а то и больше.
Но я этого делать не стал, так как старался сохранить максимально близкий к стандартному внешний вид вертолета.
Устраняем болтанку тяг.
Чтобы повысить точность управления, нужно устранить люфты, которые в основном присутствуют во всех соединениях тяг.
Сделать это просто.
Одеваем на шарики рычагов ТАП резиновые колечки. В местах крепления тяг к рычагам сервоприводов также одеваем резиновые колечки.
Это устранить лишнюю болтанку и повысит точность управления.

Про аккумуляторы
С аккумуляторами я особо не экспериментировал.
Единственное что в дополнение к родному я приобрел аккум на 1000мАч.
С родным аккумулятором время активного полета составляет порядка 6 минут. С аккумулятором на 1000мАч время увеличивается на минут и составляет 7 минут.
Разница в весе 12 грамм. В полете, после всех выше описанных модификаций, эту разницу чувствую. Вертолет с 1000 аккумом летает дольше, но при этом инерционность вертолета так же увеличивается.
Аккумы, крепятся в корпусе вертолета при помощи липучек, смотри фото выше, это удобно, и практично.
Про держатели канопы
Держатели канопы на 912 выполнены очень слабенько, и ломаются при первом же краше.
Стоит они копейки, но покупать их не хочется, так как они снова поломаются.
Недавно появился достаточно хороший вариант держателей от FX071C
banggood.com/FX071C-RC-Helicopter-Part-Canopy-Moun…
Они гораздо крепче родных.
Но что делать если родные сломались, а ждать посылку из Китая желания нет?
Как вариант можно сделать держатели самому.
Для этих цели очень хорошо подойдут чёпики под стяжки для гипсокартона, которые можно приобрести в ближайшем строительном магазине по 20коп\шт.
После получасового напилинга при помощи бормашины мы получаем очень прочные каноподержатели, которые, как показала практика, не ломаются при серьезных крашах, хорошо удерживают канопу на своем месте, чем сводят к минимуму возможность повреждения внутренностей вертолета.

Продолжение следует
WLToys V912 4-рех канальный флайбарный вертолет 200 размера.
banggood.com/Wholesale-Large-WLtoys-V912-4CH-Singl…
Вертолет для начинающих пилотов, и поэтому его можно смело отнести больше в раздел игрушек, чем в раздел серьезных аппаратов.
Тем не менее, для начально знакомства, это весьма достойный аппарат.
На сегодняшний день появилась версия WLToys V912 с бесколлекторным основным мотором, и эта версия будет более предпочтительна (хотя она немного урезана по функционалу, и у нее отсутствует возможность подключение видеокамеры, аппарата мыльных пузырей, брызгалки, и подъемного крана.
banggood.com/WLtoys-V912-4CH-Brushless-RC-Helicopt…
Если на момент прочтения этой записи вы еще не купили WLToys V912, или купили и уже успели его разбить) то советую обратить внимание на другу модель такого же размера, но уже без флайбара, FX071c
banggood.com/FX071C-4CH-Single-Propeller-Without-B…
Данная модель летает гораздо лучше, чем v912. Качество исполнения у нее также выше. Ну и отсутствие флайбара делает ее более надежной и долговечной.
В этой записи я хочу рассказать о WLToys V912, поэтому дальше только о нем.
Достоинства:
- не дорогой
- очень крепкий и краше устойчивый.
- запчасти очень дешевые и в наличии во многих местах.
- летит из коробки, но только безветренную погоду.
- довольно неплохой пульт для игрушки данного уровня.
- наличие дополнительных аксессуаров, видеокамеры, аппарата мыльных пузырей, брызгалки, и подъемного крана.
Недостатки:
- качество исполнение и балансировка из коробки оставляют желать лучшего.
- из коробки требует балансировки флайбара и ротора, для того чтобы продлить срок службы.
- флайбар при резких маневрах бьет по канопе и по хвостовой балке.
- хвостовой плавник не достаточной длинны, и не защищает хвостовой ротор от ударов о землю.
- качество и конструкция редуктора хвостового ротора очень плохое.
- коллекторных двигателей хватает на 50-70 полетов.
- плохое охлаждение основного двигателя.
Собственно, об устранении всех недостатков и пойдет речь дальше.
Это моя версия 912, которую я старался оставить максимально похожей на оригинал.
Ниже подробнее обо всех модификациях.

Самое первое что нужно сделать, это привести в порядок хвост.
В стоке хвостовой редуктор живет очень недолго, так как пиньон на двигателе превращается в пыли, в связи с тем, что шестерня редуктора болтается и вибрирует при работе. Хвостовой ротор цепляется о землю, еще больше укорачивая жизнь редуктора.
Вариантов лечения хвоста достаточно много. Дальше приведу несколько, от самых простых и не затратных, до самых дорогих и красивых.
Вариант 1 - дёшево и быстро.
Герметизируем, и модернизируем редуктор. Удлиняем хвостовой плавник.
Внутри корпуса редуктора вклеиваем вставки из тонкого прозрачного пластика, закрываем им отверстия. Укорачиваем вал движка и закрываем отверстие под него, заклеиваем пару маленьких отверстий снизу и сверху.
Ось, на которую одевается хвостовая шестерня, перемещаем глубже в саму шестерню. Сделать это можно подрезав корпус редуктора, в том месте где вставляется ось.
Укорачиваем на один виток шуруп крепления винта, чтоб он не упирался в ось.
Все промазываем силиконовой смазкой.
В хвостовом плавнике пересверливаем крепёжные отверстия и опускаем его ниже. Либо делаем новый хвостовой плавник большей длинны.
Так же можно установить в хвост диод, это поможет лучше ориентироваться при полетах в темное время суток.

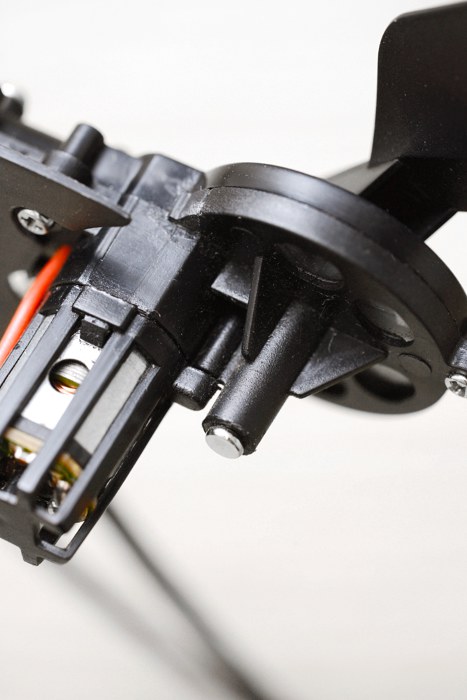

Вариант 2 - чуть дороже и сложнее.
Проделываем все выше описанные манипуляции по герметизации редуктора, и удлинению хвостового плавника.
А дальше начинается самое сложно - модернизация редуктора под подшипники.
Я установил в редуктор точно такие же подшипники как на основном валу, 8*5*2,5.
Всю процедуру описывать не буду, думаю по фото будет все ясно.


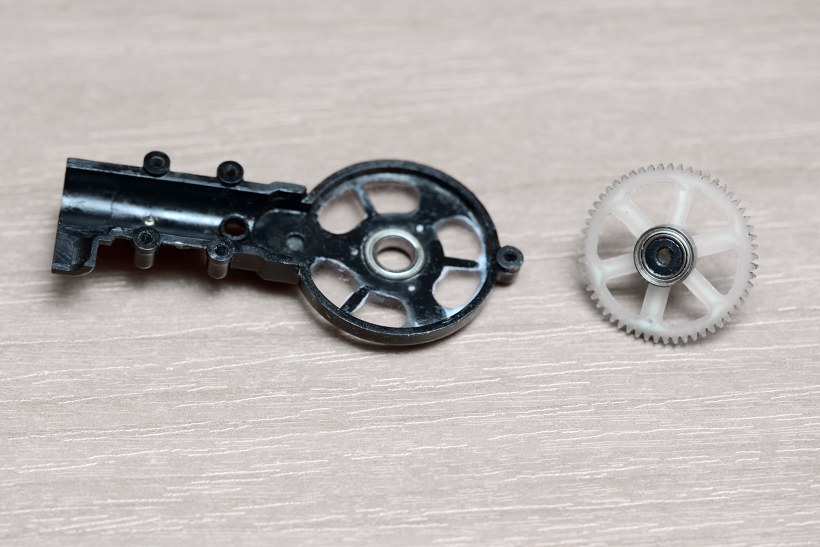
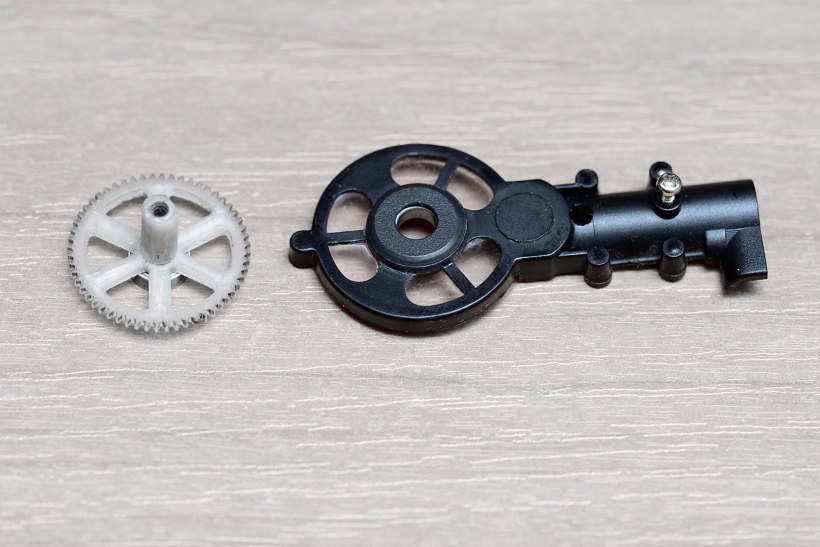
Вариант 3 - самый дорогой, красивый и надежный. На нём я и остановился.
Ставим хвост от Walkera Master CP
Приобретаем следующие детали:
корпус хвоста- www.banggood.com/Wholesale-Wa...5-p-51171.html
заглушка для корпуса- www.banggood.com/Wholesale-Wa...6-p-51170.html
хвостовой винт- www.banggood.com/Wholesale-Wa...2-p-51074.html
шестерни для редуктора- www.banggood.com/Wholesale-Wa...7-p-51188.html
подшипники для редуктора- www.banggood.com/Wholesale-Wa...9-p-51184.html
Я не знал размеров подшипников поэтому заказал комплект
Из комплекта подшипником понадобятся только 2, поэтому можно поискать их отдельно. Подшипники с фланцем, размером 6*2*2,5 ( Н*В*Ш)
(все выше не реклама)
Качество деталей довольно хорошее.
Все это легко собирается и становится на родную балку. Даже не придется пересверливать отверстие в балке, если сделать небольшой пропил на конце балки, под направляющую, которая находится внутри корпуса хвоста. Родную проводку можно оставить ее как раз хватает.
Хвостовой мотор от валкиры гораздо больший по размерам и диаметр вала у него 1,5 мм, а диаметр вала на нашем моторе 1мм. Поэтому придется найти болтики со большими шляпками для того чтобы закрепить двигатель, и сделать втулочку для шестерни диаметром 1.55*0,95, для плотной посадки ее на наш двигатель.
Втулочка делается довольно легко из латунного кончика пасты. Сначала она вбивается в саму шестерню. Это нужно делать аккуратно, так как шестерня пластиковая и упирать ее нужно на алюминиевую вставку, а не на пластик.
После того как втулка посажена в шестерню, садим ее на двигатель, так же упирая шестерню на алюминиевую вставку, и бьем по задней части двигателя, а именно по металлической вставки в центре.
Так как хвост пришел нового типа, с посадочным местом под диод, я поставил на кончик хвоста синий мигающий диод. Оригинального диода на хвост я не нашел и не знаю, как выглядит заглушка которая его крепит, поэтому я закрепив его пластинкой из пластика, предварительно вырезав ее под нужные размеры.
Валкировский хвост с нашим двигателем в сборе весит -23г
Без задней заглушки - 22г
Родной хвост в сборе весит - 19.3
В общем хвост хоть и немного тяжелее родного, но работает ОЧЕНЬ ХОРОШО, и так как диметр винта меньше, а редуктор более оборотистый, мне показалось, что двигателю стало работать чуть легче.



И вот еще один вариант от Максима Машкина замены хвоста на хвост от E-SKY HONEY BEE 2.
rcopen.com/forum/f116/topic299432/1178
rcopen.com/forum/f116/topic299432/1418
Вторая большая проблема - это то что вертолет не хочет летать даже в небольшой ветерок.
Опять вариантов решения этой проблемы есть несколько, от самых простых и не затратных, до боле сложных.
Вариант 1 - удлиняем рычаги сервоприводов.
Это самый простой метод, и он достаточно хорошо работает.
Позволяет увеличить угол отклонения АТП (автомата тарелки перекоса) и соответственно увеличить угол отклонения лопастей.
фото Grishik

Вариант 2 - чуть затратнее.
Увеличить угол отклонения лопастей можно изменив коэффициент передачи рычагов микшера.
Родные рычаги микшера имеют малый коэффициент передачи. Если их заменить на более длинные, с большим коэффициентом передачи, мы получим больший угол отклонения лопастей
Отлично подойдут рычаги микшера от Nine Eagles Solo Pro 228/228P


Фото отсюда www.rcgroups.com/forums/showthread.php?t=1803090&p…
Вариант 3 - самый трудоемкий.
Впаиваем резисторы в цепь обратной связи сервоприводов, как показано вот в этом видео.
В данном видео использовали резисторы на 4.7К. В ходе экспериментов я выяснил что это слишком сильно увеличило угол отклонения качалок, так что уже в режиме Н качалки упираются в корпус, что может привести к поломки редуктора сервоприводов.
Я рекомендую впаивать резисторы на 3-3.2К, этого будет достаточно!
Резисторы, впаиваются в 2 крайних черных провода обратной связи. На фото платка сервопривода до и после модификации.
Результат очень впечатляющий. Угол отклонения качалок сервоприводов заметно увеличился. Для сравнения на фото ниже один сервопривод с резисторами, другой без, в крайних положениях качалок. Разница большая!
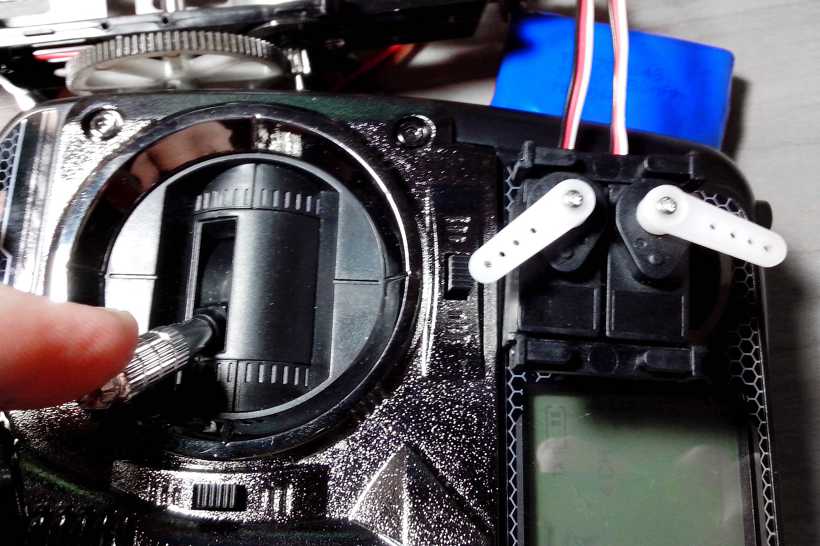
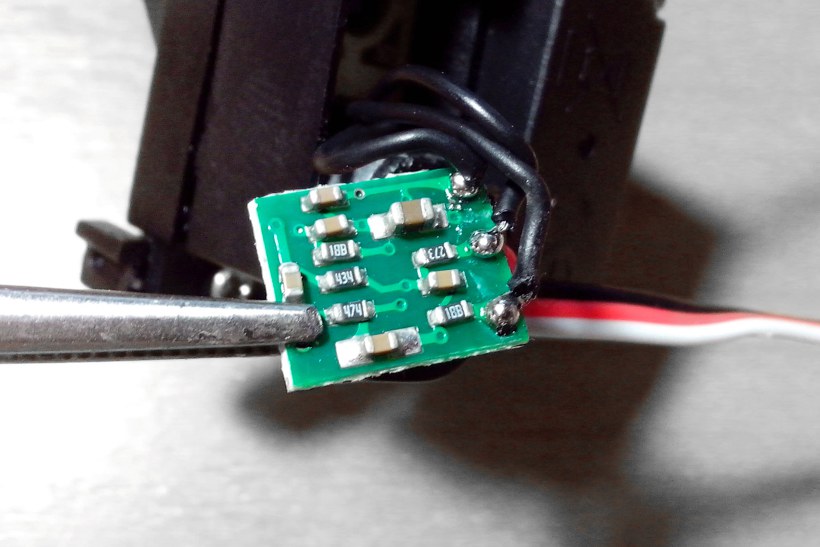

В общем я пока остановился на этом варианте. Итоговый результат расширения хода качалок реально чувствуется!
При наличии прямых рук, мод не сильно сложен в реализации. Цена резисторов 0,15грн\штука.
Продолжение следует.